Transcription
IDENTIFICATION OF MULTIVARIABLE HIGH-PERFORMANCETURBOFAN ENGINE DYNAMICS FROM CLOSED-LOOP DATAWalter C. MerrillNASA Lewis Research CenterCleveland,OhioFirstAnnual NASA AircraftControlsWorkshopNASA Langley Research CenterHampton, VirginiaOctober 24-26, 1983221
A typicalengine controldesign cycle consistsof developinga dynamic enginea controlbasedsimulationfrom steady-statecomponent performance data, designingand then testingand modifyingthe controlin an engine testupon this simulation,This design cycle has been successfulforcellxtomeet performancerequirements.However, for more advanced multivariableengines thatstate-of-the-artengines.this procedure willresultin substantialexhibitstrong variableinteractions,triaiand error modificationof the controlduring the testingphase.One methodto automate the design process and reduce controlmodificationtestingand development cost would be to identifyaccuratedynamic models directlyfrom the closedThese identifiedmodels would then be used in conjunctionwith aloop test data.synthesisprocedure to systematicallyrefinethe control.Recent advances inclosed-loopidentifiability(Ref. 1) present a methodologyfor this directidentificationof engine model dynamics from closed-looptest data.This paperdescribesthe applicationof an identificationmethod (Ref. 2) to simulatedandactualclosed-loopFlOO engine data (Ref. 3).This study was undertakento determine if usefuldynamic engine models could be identifieddirectlyfrom closed-loopengine test data (Ref. 4).(See fig.1.)Determine MultivariableEngine ModelsDirectlyfrom Closed-LoopEngine TestFigure222l.-Identificationobjective.Data
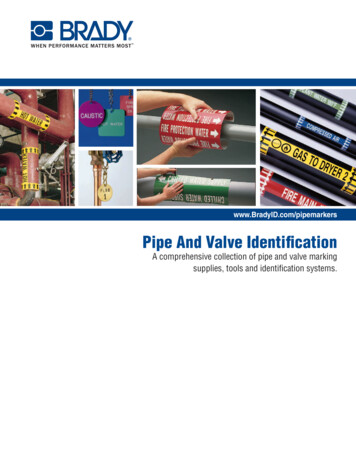
The FlOO engine was tested inevaluatethe FlOO Multivariableperiod the "Billof Material"up controlmodel.Thus, thereobtainedthroughoutthe flightrequests.(See fig.2.)the Lewis Research Center altitudetest ,facilitytoControl(MVC) law (Ref. 3).During the same test(BOM) controlwas also evaluatedas a baseline/backwere a varietyof closed-loopoperatingrecordsenvelope with a number of differentpower inputNote that directcontrolof the engine controlsinputs is not possible.Sincethis is a closed-loopprocess,input and output noise willbe correlated.Normally,this precludesthe use of open-loop indentificationtechniqueswhich requireindependence of the inputs and outputs.However, sufficientindependence can beguaranteedif the PI controlchanges during a transientor if the simplifiedengine model generates a fullrank, independentdesiredinput.This lattercondition is the case for the FlOO MVC structureand thus allows a directapplicationof open-loopidentificationmethodology.C(mTR#SF-100. Fi EffilleOUTPUTS3--- iSchodulodProportion81l nd IntegralControl- PLmHrICOIWITIONSFlOO multivariablecontrolstructure.223
The InstrumentalVariable/ApproximateMaximum Likelihood(IV/AML) method is anoutput error method of time series analysis.It was implementedin a combinediterative/recursiveform.The IV/AML method was selectedbecause the methodexhibitsreasonableconvergencefor a small number of samples.The IV/AML methodis based upon an approximatedecompositionof the maximum likelihoodsolutiontothe identificationproblem napproach.TimeAppliedto
Engine dynamics at a steady-stateoperatingpoint are adequatelymodeled by aFor the FlOO engine -? three-outputfour-inputmodellinearstate space system.writtenwith the "transferfunction"form given in Ref. 2 is shown. Engine speedsEngine exhaust nozzle pres(Nl and N2) are importantdynamic engine variables.sure (PT6) is an indicatorof engine thrust.The engine inputs are fuel flow(WF), nozzle area (AJ), compressor inletvariableguide vane position(CIVV) and(See fig.4.)rear compressor variablestatorvane position(RCW).Czl A x, Bpmx,(zi ek cl qkykY xk qkCNl ,N2,PT61Tu (WF 9 AJ t CIVV t RCVVIFigure4.-EngineTmodel equations.225
The initialvalues for the A, B, and C matricesof the model were determinedfromSISO open-loopidentificationtests performed on an engine simulation.Thesevalues were used to startthe closed-loopidentificationprocedure.The modelstructurewas taken from a third-orderbehavioralmodel developed in Ref. 5.Signal-to-noiseratioswere determinedfrom actual closed-loopdata.Analysisshowed the noise levelsto be very low.(See fig.5.)lAPB XInitiallStructurelNoisefromEstimatesfrom7 SNR 95BOM Data22 SNR 8005.-EnginefromBehavioralMVC DataFigure226ValuesDatamodel definition.SimulationModel
The IV/AML, method was originallyappliedto SISO simulateddata to determineThe method was then appliedto open-loop MIMO simulatedinitialparameter values.data.From these MIMO tests an additionalelement of Al was found to be necessaryto satisfactorilymodel PT6. Also, the noise model was found to be very closeThe engine model found from this MIMO test was then used toto the plant model.predictengine behavior based upon actualclosed-loopengine data.The FlOO engine was tested in the Lewis Research Center altitudetest facilityDuring theto evaluatethe FlOO MultivariableControl(MVC) law (Ref. 3).(BOM) controlwas also evaluatedassame test period the "Billof Material"of closed-loopoperatinga baseline/backupcontrol'mode. Thus, there are a varietyrecords obtained throughoutthe flightenvelope with a number of differentThe two multivariabledata sets used in this report werepower input requests.as the power request wasrecorded at an ALT 10,000 ft, MN 0.9 conditionvaried(step change) in a small (hopefullylinear)range about intermediateOne set correspondsto an MVC controltest,the other to a BOMengine power.test.Data were sampled at T 0.05 set for lo-secondtransients,which yields(See fig.6.)200 pointsfor each record in the data oop)BOM ControlMVC ControlTz.05;Figure6.-Applicationliklihoodof instrumentalmethod.200 Pointsvariable/approximatemaximum227
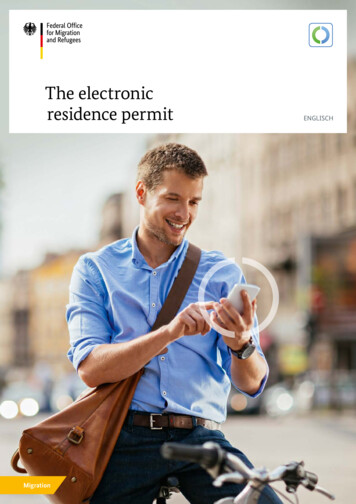
NormalizedWP from the BOM and MVC controltests is shown in figure7. This isPower spectrum analysisof thesetypicalof the engine inputs in these tests.inputs shows a slightlyhigher frequencycomponent in the MVC inputs,althoughHowever, for both the BOM andmore totalpower is containedin the BOM inputs.MVC inputs most of the power is concentratedbelow 6 radians/set.Note thattheseinputsare not persistentlyexciting.WF-WCWF- BOM45 6TIME,WCFigure2287.-Typicaltestinputs.
The controlinputs of figure7 were used in conjunctionwithfied from the simulation(Model 1) to predictengine output.the MIMO model indenti-Comparing the predictedoutputs of model 1 with the actualoutputs,it was apparNo output was predictedwell for eitherBOM orent that model 1 was unacceptable.SlightdiscrepanciesbetweenFigure ,8 is typicalof the comparison.MVC data.simulationand test data cannot account for large discrepanciesbetween predictedand actual outputs.PREDICTEDeec.Ol .oo -0 SIMULATEDBOMOUTPUT-0,I1FigureIi?8.-I3III4 56TIME, setIdentificationresultsforIIII70910model 1.229
To investigateapplieddirectlythis inabilityto predictto the closed-loopdataengine response,the IV/APE method wasproducing models 2 (MVC) and 3 (BOM).As illustratedin figure9, model 3 accuModel 1 was used as a startingpoint.ratelyreproducesthe data from which it was generated(BOM). Model 2 resultsarethe error of all the outputsfor models 1, 2, and 3 is lesssimilar.In fact,for models 1, 2, and 3 it can be seen thatthan 1%. However, comparing parameterswhile Al remains essentiallyunchanged, elements of Bl do change substantially.This impliesa slightlyoverparameterizedmodel structurewhich does accountfor the inabilityof model 1 to predictBOM and MVC engine data.4S 6nAM# setFigure2309.-Identificationresults8formodel 3.
A procedure was developed to remove the overparameterization.Three parametersThewere eliminatedand this new structurewas appliedto the simulationdata.(See fig.10.)resultantIV/AML identifiedmodel is given as model 4.0025.oooO-.W5-.0050-.OW3-. oa2-.olB00A0-. elm-. ol73slMlnAlEomoDaMODELSAcnML-.o800 a23456789u)q FigurelO.-Identificationresultsformodels4 and 5.231
unsatisfactory.When used to predictBOM and MVC output data, model 4 was stillModel 4 did predictNl(MVC), N2(MVC), and N2(BOM).However, Nl(BOM) and espeThe error in PT6 is someciallyPT6 for both data sets were not predictedwell.The Nl(BOM) errorwhat expected from sensor and input bandwidth consideration.Figure 11 compares predictedNl data using model 4 towas not expected,however.Model 4 predictedNl grosslyfollowsthe trendactual closed-loopNl(BOM) data.Thus, it appears that the dynamic portionof model 4 isof the simulateddata.However, there must then be large discrepanciescorrect.in some of the model 4These discrepanciesare somewhat perplexinggain terms.since model 4 predictedNl(MvC) but not Nl(BOM).JKO.ols .OlO .als acAlo -.oos TO10 -.ols --. OL IFigure2321ll.-I2IIIII34 S 6TlMs I -iI789IdentificationIresultsformodel105, PT6.
in magnitude than the MVC inputsRecall,however, that fhc BOM inputs are largerThus, some nonlineareffectsmayand that model 4 representslinearizeddynamics.This explanationis not entirelysatisfactorysincebe inherentin the BOM data.Further work to resolvethis problem isNZ(BOM) and N2(MVC) were both predicted.The IV/AML identificationmethod was again utilizedto furtherrefinerequired.the model parametersfor the structureof model 4 using the two sets of experiThe purpose of this finaliterationis to identifyamental closed-loopdata.single model that can accuratelypredictboth sets of engine test data and, hope(See fig.12.)fully,simulationdata as well.DFigure1212.-345678910Tuy saIdentificationresultsformodel 5, N2.233
Again model 4 was used as an initialconditionin the IV/AML method appliedto theModels 5 and 6 resulted.Both models 5 and 6 fittheirrespecBOM and MVC data.Figures10 to 12, for example, show a good fit of thetive data sets quite well.comparisonsto MVC data wereBOM data by outputs predictedusing model 5. Similarwhen the BOM model 5 is used to predictobtained using model 6. More importantly,the MVC data, the comparison given in Figures 13 to 15 is quite reasonable.Thus,model 5 (or equivalentlymodel 6) representsa model which predictsa class ofinputs and can be used with confidencein a controldesign procedure.ozsr0123456789Mlnw formodel 5 predictingmultivariable
The IV/AMLtest od was appliedto both open-loop simulationand closed-loopof an FlOO turbofanengine.The method accuratelyand consistentlymodels from both the simulationand test data.Due to theof the BOM and MVC controllaws, the engine model is stronglysystemand consequentlya directidentificationapproach was used on thedata.A third-ordermodel structurewas derived and found to be overparameterized.Three parameters were eliminatedby s found acceptablefor fittingboth simulationand testdata.Test model accuracy is limitedto 6 radians/setsince spectralanalysisof the inputs shows limitedsignalstrengthabove this ure14.--v- PREDICTEWI0 1vvdIII234 IforIIImodel 5 predictingIImultivariable235
Comparisons showed that models identifiedfrom simulateddata generallypredictedNl(MVC), N2(MVC), and N2(BOM) testresponse adequately.However,predictionsof pT604VC) and PT6(BOM) were poor and Nl(BOM) showed someThe PT6 differencesareattributedto the lowdiscrepanciesin dynamics.frequencycontent of the test input signals(ti radians/set),the bandwidth ofnature of the PT6 mode. However, thethe sensor, and the high-frequencydifferencein Nl is attributableto a differencein simulatedversus actualThis conclusionis accuratelyportrayedin a comparisonengine performance.of identifiedmodels.012rI I I-.OOd01234S6789lOII1IIIInMS Figure23615.-Identificationdata, N2.resultsformodel 5 multivariablecontrol
Finally,a simplifiedmodel determinedfrom BOM data accuratelypredictednotonly BOM but also MVC test response data.This abilityto predictengineperformancefor a class of inputs generates confidencein controlsdesignedfrom this model.Thus, it is concluded that useful dynamic engine models canbe obtainedfrom closed-looptest data using the IV/AML identificationmethod.This identificationtechnique,then, representsthe firststep in anautomated engine controldesign process.(See lModelsWorkedModel isWellSSIModel StructurePredictsfromTestSimulationDatado notPredictNICBOM and PT6CBOM & MVC)lBOM Model PredictsFigure16.-MVC DataConclusions.237
REFERENCES2381.Soderstrom,T.; Ljung, L.; and Gustavsson,I.:IdentifiabilityConditions for Linear MultivariableSystems OperatingUnder Feedback.IEEETrans. of Autom. Control,Vol. AC-21, No. 6, Dec. 1976, pp. 837-840.2.Jakeman, A.; and Young, P.:Refined InstrumentalVariableMethods ofRecursiveTime-SeriesAnalysis- Part II, MultivariableSystems.Int.J. Control,Vol. 29, No. 4, 1979, pp. 624-644.3.Lehtinen,F.K.B; Costakis,tude Test of a MultivariableTMS-83367, July 1983.4.Merrill,Engine5.DeHoff, R.L.; Hall, W.E., Jr.; Adams, R.J.;and Gupta, N.K.:MultivariableControlSynthesisProgram.Vols. I and II,(AD-A052420 and AD-A052346.1AFAPL-TR-77-35,June 1977.W.G.; Soeder, J.F.;and Seldner,K.:ControlSystem for the FlOO Engine.AltiNASAW.:Identificationof MultivariableHigh Performance TurbofanDynamics from Closed-LoopData.NASA TM 82785, June 1982.FlOO
BOM and MVC data. Models 5 and 6 resulted. Both models 5 and 6 fit their respec- tive data sets quite well. Figures 10 to 12, for example, show a good fit of the BOM data by outputs predicted using model 5. Similar comparisons to MVC data were obtained using model 6.