Transcription
Mathematical Methods in Engineering and ScienceMathematical Methods in Engineering andScience[http://home.iitk.ac.in/ dasgupta/MathCourse]Bhaskar Dasguptadasgupta@iitk.ac.inAn Applied Mathematics course forgraduate and senior undergraduate studentsand also forrising researchers.1,
Mathematical Methods in Engineering and ScienceTextbook: Dasgupta B., App. Math. Meth.(Pearson Education 2006, 2007).http://home.iitk.ac.in/ dasgupta/MathBook2,
Mathematical Methods in Engineering and ScienceContents IPreliminary BackgroundMatrices and Linear TransformationsOperational Fundamentals of Linear AlgebraSystems of Linear EquationsGauss Elimination Family of MethodsSpecial Systems and Special MethodsNumerical Aspects in Linear Systems3,
Mathematical Methods in Engineering and ScienceContents IIEigenvalues and EigenvectorsDiagonalization and Similarity TransformationsJacobi and Givens Rotation MethodsHouseholder Transformation and Tridiagonal MatricesQR Decomposition MethodEigenvalue Problem of General MatricesSingular Value DecompositionVector Spaces: Fundamental Concepts*4,
Mathematical Methods in Engineering and ScienceContents IIITopics in Multivariate CalculusVector Analysis: Curves and SurfacesScalar and Vector FieldsPolynomial EquationsSolution of Nonlinear Equations and SystemsOptimization: IntroductionMultivariate OptimizationMethods of Nonlinear Optimization*5,
Mathematical Methods in Engineering and ScienceContents IVConstrained OptimizationLinear and Quadratic Programming Problems*Interpolation and ApproximationBasic Methods of Numerical IntegrationAdvanced Topics in Numerical Integration*Numerical Solution of Ordinary Differential EquationsODE Solutions: Advanced IssuesExistence and Uniqueness Theory6,
Mathematical Methods in Engineering and ScienceContents VFirst Order Ordinary Differential EquationsSecond Order Linear Homogeneous ODE’sSecond Order Linear Non-Homogeneous ODE’sHigher Order Linear ODE’sLaplace TransformsODE SystemsStability of Dynamic SystemsSeries Solutions and Special Functions7,
Mathematical Methods in Engineering and ScienceContents VISturm-Liouville TheoryFourier Series and IntegralsFourier TransformsMinimax Approximation*Partial Differential EquationsAnalytic FunctionsIntegrals in the Complex PlaneSingularities of Complex Functions8,
Mathematical Methods in Engineering and ScienceContents VIIVariational Calculus*EpilogueSelected References9,
Mathematical Methods in Engineering and ScienceOutlinePreliminary BackgroundTheme of the CourseCourse ContentsSources for More Detailed StudyLogistic StrategyExpected BackgroundPreliminary BackgroundTheme of the CourseCourse ContentsSources for More Detailed StudyLogistic StrategyExpected Background10,
Mathematical Methods in Engineering and ScienceTheme of the CoursePreliminary BackgroundTheme of the CourseCourse ContentsSources for More Detailed StudyLogistic StrategyExpected BackgroundTo develop a firm mathematical background necessary for graduatestudies and research a fast-paced recapitulation of UG mathematics extension with supplementary advanced ideas for a matureand forward orientation exposure and highlighting of interconnectionsTo pre-empt needs of the future challenges trade-off between sufficient and reasonable target mid-spectrum majority of studentsNotable beneficiaries (at two ends) would-be researchers in analytical/computational areas students who are till now somewhat afraid of mathematics11,
Mathematical Methods in Engineering and ScienceCourse Contents Applied linear algebra Multivariate calculus and vector calculus Numerical methodsDifferential equations Complex analysisPreliminary BackgroundTheme of the CourseCourse ContentsSources for More Detailed StudyLogistic StrategyExpected Background12,
Mathematical Methods in Engineering and ScienceSources for More Detailed StudyPreliminary BackgroundTheme of the CourseCourse ContentsSources for More Detailed StudyLogistic StrategyExpected BackgroundIf you have the time, need and interest, then you may consult individual books on individual topics; another “umbrella” volume, like Kreyszig, McQuarrie, O’Neilor Wylie and Barrett; a good book of numerical analysis or scientific computing, likeActon, Heath, Hildebrand, Krishnamurthy and Sen, Press etal, Stoer and Bulirsch; friends, in joint-study groups.13,
Mathematical Methods in Engineering and ScienceLogistic StrategyPreliminary BackgroundTheme of the CourseCourse ContentsSources for More Detailed StudyLogistic StrategyExpected Background Study in the given sequence, to the extent possible. Do not read mathematics. Use lots of pen and paper.Read “mathematics books” and do mathematics.Exercises are must. Use as many methods as you can think of, certainly includingthe one which is recommended.Consult the Appendix after you work out the solution. Followthe comments, interpretations and suggested extensions.Think. Get excited. Discuss. Bore everybody in your knowncircles.Not enough time to attempt all? Want a selection ?Program implementation is needed in algorithmic exercises. Master a programming environment.Use mathematical/numerical library/software.Take a MATLAB tutorial session?14,
Mathematical Methods in Engineering and SciencePreliminary BackgroundLogistic StrategyTheme of the CourseCourse ContentsSources for More Detailed StudyLogistic StrategyExpected BackgroundTutorial 5Selection Tutorial Chapter Selection 1,2,3,4,7,94,9461,2,3,4,5,6 3,41,2,5,77471,2,331,2,3,5,8,9,10 9,10481,2,3,4,5,611,2,4,551,2,3,4,5515,
Mathematical Methods in Engineering and ScienceExpected BackgroundPreliminary BackgroundTheme of the CourseCourse ContentsSources for More Detailed StudyLogistic StrategyExpected Background moderate background of undergraduate mathematics firm understanding of school mathematics and undergraduatecalculusTake the preliminary test.[p 3, App. Math. Meth.]Grade yourself sincerely.[p 4, App. Math. Meth.]Prerequisite Problem Sets*[p 4–8, App. Math. Meth.]16,
Mathematical Methods in Engineering and SciencePoints to notePreliminary BackgroundTheme of the CourseCourse ContentsSources for More Detailed StudyLogistic StrategyExpected Background Put in effort, keep pace. Stress concept as well as problem-solving. Follow methods diligently. Ensure background skills.Necessary Exercises: Prerequisite problem sets ?17,
Mathematical Methods in Engineering and ScienceOutlineMatrices and Linear TransformationsMatricesGeometry and AlgebraLinear TransformationsMatrix TerminologyMatrices and Linear TransformationsMatricesGeometry and AlgebraLinear TransformationsMatrix Terminology18,
Mathematical Methods in Engineering and ScienceMatricesMatrices and Linear TransformationsMatricesGeometry and AlgebraLinear TransformationsMatrix TerminologyQuestion: What is a “matrix”?Answers: a rectangular array of numbers/elements? a mapping f : M N F , where M {1, 2, 3, · · · , m},N {1, 2, 3, · · · , n} and F is the set of real numbers orcomplex numbers ?Question: What does a matrix do?Explore: With an m n matrix A,y1 a11 x1 a12 x2 · · · a1n xny2 a21 x1 a22 x2 · · · a2n xn. . .ym am1 x1 am2 x2 · · · amn xn orAx y19,
Mathematical Methods in Engineering and ScienceMatrices and Linear TransformationsMatricesMatricesGeometry and AlgebraLinear TransformationsMatrix TerminologyConsider these definitions: y f (x) y f (x) f (x1 , x2 , · · · , xn ) yk fk (x) fk (x1 , x2 , · · · , xn ),k 1, 2, · · · , m y f(x) y AxFurther Answer:A matrix is the definition of a linear vector function of avector variable.Anything deeper?Caution: Matrices do not define vector functions whose components areof the formyk ak0 ak1 x1 ak2 x2 · · · akn xn .20,
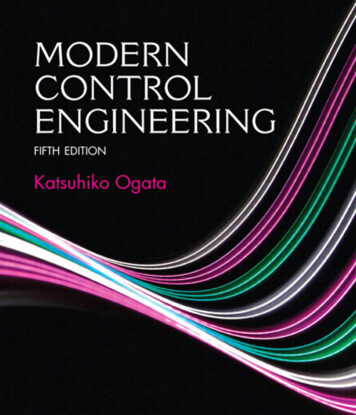
Mathematical Methods in Engineering and ScienceMatrices and Linear TransformationsGeometry and AlgebraMatricesGeometry and AlgebraLinear TransformationsMatrix TerminologyLet vector x [x1 x2 x3 ]T denote a point (x1 , x2 , x3 ) in3-dimensional space in frame of reference OX1 X2 X3 .Example: With m 2 and n 3, y1 a11 x1 a12 x2 a13 x3.y2 a21 x1 a22 x2 a23 x3Plot y1 and y2 in the OY1 Y2 plane.111R3A X1DomainCo domainFigure: Linear transformation: schematic illustrationWhat is matrix A doing?21,
Mathematical Methods in Engineering and ScienceGeometry and AlgebraMatrices and Linear TransformationsMatricesGeometry and AlgebraLinear TransformationsMatrix TerminologyOperating on point x in R 3 , matrix A transforms it to y in R 2 .Point y is the image of point x under the mapping defined bymatrix A.Note domain R 3 , co-domain R 2 with reference to the figure andverify that A : R 3 R 2 fulfils the requirements of a mapping, bydefinition.A matrix gives a definition of a linear transformationfrom one vector space to another.22,
Mathematical Methods in Engineering and ScienceLinear TransformationsMatrices and Linear TransformationsMatricesGeometry and AlgebraLinear TransformationsMatrix TerminologyOperate A on a large number of points xi R 3 .Obtain corresponding images yi R 2 .The linear transformation represented by A implies the totality ofthese correspondences.We decide to use a different frame of reference OX1′ X2′ X3′ for R 3 .[And, possibly OY1′ Y2′ for R 2 at the same time.]Coordinates change, i.e. xi changes to x′i (and possibly yi to yi′ ).Now, we need a different matrix, say A′ , to get back thecorrespondence as y′ A′ x′ .A matrix: just one description.Question: How to get the new matrix A′ ?23,
Mathematical Methods in Engineering and ScienceMatrix Terminology ···Matrices and Linear TransformationsMatricesGeometry and AlgebraLinear TransformationsMatrix Terminology··· Matrix product Transpose Conjugate transpose Symmetric and skew-symmetric matrices Hermitian and skew-Hermitian matrices Determinant of a square matrix Inverse of a square matrix Adjoint of a square matrix ······24,
Mathematical Methods in Engineering and SciencePoints to noteMatrices and Linear TransformationsMatricesGeometry and AlgebraLinear TransformationsMatrix Terminology A matrix defines a linear transformation from one vector spaceto another. Matrix representation of a linear transformation depends onthe selected bases (or frames of reference) of the source andtarget spaces.Important: Revise matrix algebra basics as necessary tools.Necessary Exercises: 2,325,
Mathematical Methods in Engineering and ScienceOutlineOperational Fundamentals of Linear AlgebraRange and Null Space: Rank and NullityBasisChange of BasisElementary TransformationsOperational Fundamentals of Linear AlgebraRange and Null Space: Rank and NullityBasisChange of BasisElementary Transformations26,
Mathematical Methods in Engineering and ScienceOperational Fundamentals of Linear AlgebraRange and Null Space: Rank and NullityRange and Null Space: Rank and NullityBasisChange of BasisElementary TransformationsConsider A R m n as a mappingA : R n R m,Ax y,x R n,y R m.Observations1. Every x R n has an image y R m , but every y R m neednot have a pre-image in R n .Range (or range space) as subset/subspace ofco-domain: containing images of all x R n .2. Image of x R n in R m is unique, but pre-image of y R mneed not be.It may be non-existent, unique or infinitely many.Null space as subset/subspace of domain:containing pre-images of only 0 R m .27,
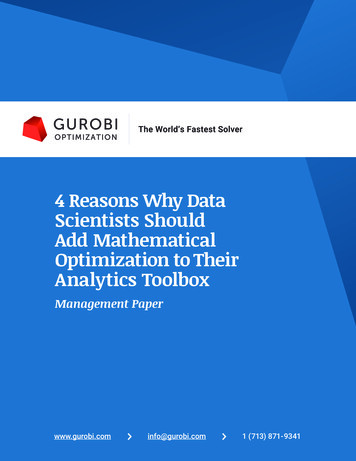
Mathematical Methods in Engineering and ScienceOperational Fundamentals of Linear AlgebraRange and Null Space: Rank and NullityRange and Null Space: Rank and NullityBasisChange of BasisRElementary TransformationsnRm0OARange ( A )Null ( A)DomainCo domainFigure: Range and null space: schematic representationQuestion: What is the dimension of a vector space?Linear dependence and independence: Vectors x1 , x2 , · · · , xrin a vector space are called linearly independent ifk1 x1 k2 x2 · · · kr xr 0 k1 k2 · · · kr 0.Range(A) {y : y Ax, x R n }Null(A) {x : x R n , Ax 0}Rank(A) dim Range(A)Nullity(A) dim Null (A)28,
Mathematical Methods in Engineering and ScienceBasisOperational Fundamentals of Linear AlgebraRange and Null Space: Rank and NullityBasisChange of BasisElementary TransformationsTake a set of vectors v1 , v2 , · · · , vr in a vector space.Question: Given a vector v in the vector space, can we describe itasv k1 v1 k2 v2 · · · kr vr Vk,where V [v1 v2 · · · vr ] and k [k1 k2 · · · kr ]T ?Answer: Not necessarily.Span, denoted as v1 , v2 , · · · , vr : the subspacedescribed/generated by a set of vectors.Basis:A basis of a vector space is composed of an orderedminimal set of vectors spanning the entire space.The basis for an n-dimensional space will have exactly nmembers, all linearly independent.29,
Mathematical Methods in Engineering and ScienceOperational Fundamentals of Linear AlgebraBasisRange and Null Space: Rank and NullityBasisChange of BasisElementary TransformationsOrthogonal basis: {v1 , v2 , · · · , vn } withOrthonormal basis:vjT vkvjT vk 0 j 6 k. δjk 01ififj 6 kj kMembers of an orthonormal basis form an orthogonal matrix.Properties of an orthogonal matrix:V 1 VT or VVT I, andNatural basis: e1 det V 1 or 1,100.0 , e2 010.0 , ··· , en 000.1 . 30,
Mathematical Methods in Engineering and ScienceOperational Fundamentals of Linear AlgebraChange of BasisRange and Null Space: Rank and NullityBasisChange of BasisnElementary TransformationsSuppose x represents a vector (point) in R in some basis.Question: If we change over to a new basis {c1 , c2 , · · · , cn }, howdoes the representation of a vector change?x x̄1 c1 x̄2 c2 · · · x̄n cn x̄1 x̄2 [c1 c2 · · · cn ] . . . x̄nWith C [c1c2···cn ],new to old coordinates: Cx̄ x andold to new coordinates: x̄ C 1 x.Note: Matrix C is invertible. How?Special case with C orthogonal:orthogonal coordinate transformation.31,
Mathematical Methods in Engineering and ScienceOperational Fundamentals of Linear AlgebraChange of BasisRange and Null Space: Rank and NullityBasisChange of BasisElementary TransformationsQuestion: And, how does basis change affect the representation ofa linear transformation?A : R n R m,Consider the mappingAx y.Change the basis of the domain through P R n n and that of theco-domain through Q R m m .New and old vector representations are related asPx̄ xandQȳ y.Then, Ax y Āx̄ ȳ, withĀ Q 1 APSpecial case: m n and P Q gives a similarity transformationĀ P 1 AP32,
Mathematical Methods in Engineering and ScienceElementary TransformationsOperational Fundamentals of Linear AlgebraRange and Null Space: Rank and NullityBasisChange of BasisElementary TransformationsObservation: Certain reorganizations of equations in a systemhave no effect on the solution(s).Elementary Row Transformations:1. interchange of two rows,2. scaling of a row, and3. addition of a scalar multiple of a row to another.Elementary Column Transformations: Similar operations withcolumns, equivalent to a corresponding shuffling of the variables(unknowns).33,
Mathematical Methods in Engineering and ScienceOperational Fundamentals of Linear AlgebraElementary TransformationsRange and Null Space: Rank and NullityBasisChange of BasisElementary TransformationsEquivalence of matrices: An elementary transformation definesan equivalence relation between two matrices.Reduction to normal form:AN Ir000 Rank invariance: Elementary transformations do not alter therank of a matrix.Elementary transformation as matrix multiplication:an elementary row transformation on a matrix isequivalent to a pre-multiplication with an elementarymatrix, obtained through the same row transformation onthe identity matrix (of appropriate size).Similarly, an elementary column transformation is equivalent topost-multiplication with the corresponding elementary matrix.34,
Mathematical Methods in Engineering and SciencePoints to noteOperational Fundamentals of Linear AlgebraRange and Null Space: Rank and NullityBasisChange of BasisElementary Transformations Concepts of range and null space of a linear transformation. Effects of change of basis on representations of vectors andlinear transformations. Elementary transformations as tools to modify (simplify)systems of (simultaneous) linear equations.Necessary Exercises: 2,4,5,635,
Mathematical Methods in Engineering and ScienceOutlineSystems of Linear EquationsNature of SolutionsBasic Idea of Solution MethodologyHomogeneous SystemsPivotingPartitioning and Block OperationsSystems of Linear EquationsNature of SolutionsBasic Idea of Solution MethodologyHomogeneous SystemsPivotingPartitioning and Block Operations36,
Mathematical Methods in Engineering and ScienceSystems of Linear EquationsNature of SolutionsNature of SolutionsBasic Idea of Solution MethodologyHomogeneous SystemsPivotingPartitioning and Block OperationsAx bCoefficient matrix: A, augmented matrix: [A b].Existence of solutions or consistency:Ax bhas a solution b Range(A) Rank(A) Rank([A b])Uniqueness of solutions:Rank(A) Rank([A b]) nSolution of Ax b is unique. Ax 0 has only the trivial (zero) solution.Infinite solutions: For Rank(A) Rank([A b]) k n, solutionx x̄ xN ,with Ax̄ bandxN Null (A)37,
Mathematical Methods in Engineering and ScienceSystems of Linear EquationsBasic Idea of Solution MethodologyTo diagnoseNature of SolutionsBasic Idea of Solution MethodologyHomogeneous SystemsPivotingPartitioning and Block Operationsthe non-existence of a solution,To determine the unique solution, orTo describeinfinite solutions;decouple the equations using elementary transformations.For solving Ax b, apply suitable elementary row transformationson both sides, leading toRq Rq 1 · · · R2 R1 Ax Rq Rq 1 · · · R2 R1 b,or,[RA]x Rb;such that matrix [RA] is greatly simplified.In the best case, with complete reduction, RA In , andcomponents of x can be read off from Rb.For inverting matrix A, treat AA 1 In similarly.38,
Mathematical Methods in Engineering and ScienceHomogeneous SystemsSystems of Linear EquationsNature of SolutionsBasic Idea of Solution MethodologyHomogeneous SystemsPivotingPartitioning and Block OperationsTo solve Ax 0 or to describe Null (A),apply a series of elementary row transformations on A to reduce it to the A,the row-reduced echelon form or RREF.Features of RREF:1. The first non-zero entry in any row is a ‘1’, the leading ‘1’.2. In the same column as the leading ‘1’, other entries are zero.3. Non-zero entries in a lower row appear later.Variables corresponding to columns having leading ‘1’sare expressed in terms of the remaining variables. u1 u2 Solution of Ax 0: x z1 z2 · · · zn k ··· un kBasis of Null(A): {z1 , z2 , · · · , zn k }39,
Mathematical Methods in Engineering and SciencePivotingSystems of Linear EquationsNature of SolutionsBasic Idea of Solution MethodologyHomogeneous SystemsPivotingPartitioning and Block OperationsAttempt:To get ‘1’ at diagonal (or leading) position, with ‘0’ elsewhere.Key step: division by the diagonal (or leading) entry.Consider Ik. . . .δ . . . . . BIG . .Ā .big. . . . . . .Cannot divide by zero. Should not divide by δ. partial pivoting: row interchange to get ‘big’ in place of δ complete pivoting: row and column interchanges to get‘BIG’ in place of δComplete pivoting does not give a huge advantage over partial pivoting,but requires maintaining of variable permutation for later unscrambling.40,
Mathematical Methods in Engineering and SciencePartitioning and Block OperationsSystems of Linear EquationsNature of SolutionsBasic Idea of Solution MethodologyHomogeneous SystemsPivotingPartitioning and Block OperationsEquation Ax y can be written as x1 A11 A12 A13 y1x2 ,A21 A22 A23y2x3with x1 , x2 etc being themselves vectors (or matrices). For a valid partitioning, block sizes should be consistent. Elementary transformations can be applied over blocks. Block operations can be computationally economical at times. Conceptually, different blocks of contributions/equations canbe assembled for mathematical modelling of complicatedcoupled systems.41,
Mathematical Methods in Engineering and SciencePoints to noteSystems of Linear EquationsNature of SolutionsBasic Idea of Solution MethodologyHomogeneous SystemsPivotingPartitioning and Block Operations Solution(s) of Ax b may be non-existent, unique orinfinitely many. Complete solution can be described by composing a particularsolution with the null space of A. Null space basis can be obtained conveniently from therow-reduced echelon form of A. For a strategy of solution, pivoting is an important step.Necessary Exercises: 1,2,4,5,742,
Mathematical Methods in Engineering and ScienceOutlineGauss Elimination Family of MethodsGauss-Jordan EliminationGaussian Elimination with Back-SubstitutionLU DecompositionGauss Elimination Family of MethodsGauss-Jordan EliminationGaussian Elimination with Back-SubstitutionLU Decomposition43,
Mathematical Methods in Engineering and ScienceGauss Elimination Family of MethodsGauss-Jordan EliminationGauss-Jordan EliminationGaussian Elimination with Back-SubstitutionLU DecompositionTask: Solve Ax b1 , Ax b2 and Ax b3 ; find A 1 andevaluate A 1 B, where A R n n and B R n p .Assemble C [A b1 b2and follow the algorithm .b3InB] R n (2n 3 p)Collect solutions from the result C C [InA 1 b1A 1 b2A 1 b3A 1A 1 B].Remarks: Premature termination: matrix A singular — decision? If you use complete pivoting, unscramble permutation. Identity matrix in both C and C? Store A 1 ‘in place’. For evaluating A 1 b, do not develop A 1 . Gauss-Jordan elimination an overkill? Want somethingcheaper ?44,
Mathematical Methods in Engineering and ScienceGauss Elimination Family of MethodsGauss-Jordan EliminationGauss-Jordan EliminationGaussian Elimination with Back-SubstitutionLU DecompositionGauss-Jordan Algorithm 1For k 1, 2, 3, · · · , (n 1)1. Pivot : identify l such that clk max cjk for k j n.If clk 0, then 0 and exit.Else, interchange row k and row l.2. ckk ,Divide row k by ckk .3. Subtract cjk times row k from row j, j 6 k. cnn If cnn 0, then exit.Else, divide row n by cnn .In case of non-singular A,default termination .This outline is for partial pivoting.45,
Mathematical Methods in Engineering and ScienceGauss Elimination Family of MethodsGauss-Jordan EliminationGaussian Elimination with Back-SubstitutionGaussian Elimination with Back-SubstitutionLU DecompositionGaussian elimination:Ax b ′′a11a12···′ a22 · · · or, . . Back-substitutions: Ax b ′ ′b1x1a1n′ ′ x a2n b2 2 . . . . . . ′xnbn′ann′xn bn′ /ann, nX1 ′xi aij′ xj for i n 1, n 2, · · · , 2, 1bi aii′j i 1Remarks Computational cost half compared to G-J elimination. Like G-J elimination, prior knowledge of RHS needed.46,
Mathematical Methods in Engineering and ScienceGauss Elimination Family of MethodsGauss-Jordan EliminationGaussian Elimination with Back-SubstitutionGaussian Elimination with Back-SubstitutionLU DecompositionAnatomy of the Gaussian elimination:The process of Gaussian elimination (with no pivoting) leads toU Rq Rq 1 · · · R2 R1 A RA.The steps given byfor k 1, 2, 3, · · · , (n 1)j-th row j-th row j k 1, k 2, · · · , ninvolve elementary matrices Rk k 1With L R 1 , 1 aa2111 aa3111. aan111A LU.ajkakk 0 0 ···1 0 ···0 1 ···. . . . .0 0 ···k-th row000.1 etc. for47,
Mathematical Methods in Engineering and ScienceGauss Elimination Family of MethodsLU DecompositionGauss-Jordan EliminationGaussian Elimination with Back-SubstitutionLU DecompositionA square matrix with non-zero leading minors is LU-decomposable.No reference to a right-hand-side (RHS) vector!To solve Ax b, denote y Ux and split asAx b LUx b Ly bForward substitutions: i 1X1lij yj yi bi liij 1Back-substitutions: nX1 uij xj yi xi uiij i 1andUx y.for i 1, 2, 3, · · · , n;for i n, n 1, n 2, · · · , 1.48,
Mathematical Methods in Engineering and ScienceGauss Elimination Family of MethodsLU Decomposition49,Gauss-Jordan EliminationGaussian Elimination with Back-SubstitutionLU DecompositionQuestion: How to LU-decompose a given matrix? L l11l21l31.000l22l32.l33.ln1ln2ln3 ·········.000.···lnn and U 3n.000···unnElements of the product giveiXandk 1jXlik ukj aijfor i j,lik ukj aijfor i j.k 1n2 equations in n2 n unknowns: choice of n unknowns
Mathematical Methods in Engineering and ScienceLU DecompositionGauss Elimination Family of MethodsGauss-Jordan EliminationGaussian Elimination with Back-SubstitutionLU DecompositionDoolittle’s algorithm Choose lii 1For j 1, 2, 3, · · · , nPi 11. uij aij k 1lik ukj for 1 i jPj 112. lij ujj (aij k 1 lik ukj ) for i jEvaluation proceeds in column order of u11 u12 u13 l21 u22 u23 A l31 l32 u33 . .ln1 ln2 ln3the matrix (for storage) · · · u1n· · · u2n · · · u3n . . · · · unn50,
Mathematical Methods in Engineering and ScienceGauss Elimination Family of MethodsLU DecompositionGauss-Jordan EliminationGaussian Elimination with Back-SubstitutionLU DecompositionQuestion: What about matrices which are not LU-decomposable?Question: What about pivoting?Consider the non-singular matrix 0 1 210 0u11 0 u12 u13 3 1 2 l21 ? 1 0 0u22 u23 .2 1 3l31l32 100 u33LU-decompose a permutation of its rows 0 32 1 21 2 1 3 0 10 0 10 1 00 0 0 1 1 00 0 0 1 1 21 2 1 3 1 0 03 10 1 0 0 1120 0133302 22 .1In this PLU decomposition, permutation P is recorded in a vector.51,
Mathematical Methods in Engineering and SciencePoints to noteGauss Elimination Family of MethodsGauss-Jordan EliminationGaussian Elimination with Back-SubstitutionLU DecompositionFor invertible coefficient matrices, use Gauss-Jordan elimination for large number of RHS vectorsavailable all together and also for matrix inversion, Gaussian elimination with back-substitution for small numberof RHS vectors available together, LU decomposition method to develop and maintain factors tobe used as and when RHS vectors are available.Pivoting is almost necessary (without further special structure).Necessary Exercises: 1,4,552,
Mathematical Methods in Engineering and ScienceOutlineSpecial Systems and Special Methods53,Quadratic Forms, Symmetry and Positive DefinitenesCholesky DecompositionSparse Systems*Special Systems and Special MethodsQuadratic Forms, Symmetry and Positive DefinitenessCholesky DecompositionSparse Systems*
Mathematical Methods in Engineering and ScienceSpecial Systems and Special Methods54,Quadratic Forms, Symmetry and Positive DefinitenesQuadratic Forms, Symmetry and PositiveDefinitenessCholesky DecompositionSparse Systems*Quadratic formTq(x) x Ax nn XXaij xi xji 1 j 1defined with respect to a symmetric matrix.Quadratic form q(x), equivalently matrix A, is called positivedefinite (p.d.) whenxT Ax 0 x 6 0and positive semi-definite (p.s.d.) whenxT Ax 0 x 6 0.Sylvester’s criteria:a11 0,a11 a12a21 a22 0, · · · , det A 0;i.e. all leading minors non-negative, for p.s.d.
Mathematical Methods in Engineering and ScienceSpecial Systems and Special MethodsCholesky Decomposition55,Quadratic Forms, Symmetry and Positive DefinitenesCholesky DecompositionSparse Systems*If A R n n is symmetric and positive definite, then there exists anon-singular lower triangular matrix L R n n such thatA LLT .Algorithm For i 1, 2, 3, · · · , nqP 1 2 Lii aii ik 1Lik Pi 1 Lji 1 aji LLjkikk 1Liifor i j nFor solving Ax b,Forward substitutions: Ly bBack-substitutions: LT x yRemarks Test of positive definiteness. Stable algorithm: no pivoting necessary! Economy of space and time.
Mathematical Methods in Engineering and ScienceSparse Systems* What is a sparse matrix? Bandedness and bandwidth Efficient storage and processingUpdates Sherman-Morrison formula(A uvT ) 1 A 1 Special Systems and Special Methods(A 1 u)(vT A 1 )1 vT A 1 uWoodbury formulaConjugate gradient method 56,Quadratic Forms, Symmetry and Positive DefinitenesCholesky DecompositionSparse Systems*efficiently implemented matrix-vector products
Mathematical Methods in Engineering and SciencePoints to noteSpecial Systems and Special Methods Concepts and criteria of positive definiteness and positivesemi-definiteness Cholesky decomposition method in symmetric positive definitesystems Nature of sparsity and its exploitationNecessary Exercises: 1,2,4,757,Quadratic Forms, Symmetry and Positive DefinitenesCholesky DecompositionSparse Systems*
Mathematical Methods in Engineering and ScienceOutlineNumerical Aspects in Linear SystemsNorms and Condition NumbersIll-conditioning and SensitivityRectangular SystemsSingularity-Robust SolutionsIterative MethodsNumerical Aspects in Linear SystemsNorms and Condition NumbersIll-conditioning and SensitivityRectangular SystemsSingularity-Robust SolutionsIterative Methods58,
Mathematical Methods in Engineering and ScienceNumerical Aspects in Linear SystemsNorms and Condition NumbersNorm of a vector: a measure of sizeNorms and Condition NumbersIll-conditio
Geometry and Algebra Linear Transformations Matrix Terminology Geometry and Algebra Let vector x [x 1 x 2 x 3]T denote a point (x 1,x 2,x 3) in 3-dimensional space in frame of reference OX 1X 2X 3. Example: With m 2 and n 3, y 1 a 11x 1 a 12x 2 a 13x 3 y 2 a 21x 1 a 22x 2 a 23x 3 . Plot y 1 and y 2 in the OY 1Y 2 plane. 1 R 2 X .