Transcription
OutlineOutline1BasicsIntroductionBasic PhysicsUnderwater sound2Sonar TheorySonar typesPosition EstimationSignal processing3Sonar ApplicationsFish findingHUGIN AUVMappingImaging4SummaryIntroduction to SonarINF-GEO4310Roy Edgar HansenDepartment of Informatics, University of OsloSeptember 2011RH, INF-GEO4310 (Ifi/UiO)SonarSept. 20111 / 76RH, INF-GEO4310 (Ifi/UiO)Sonar BasicsSonar BasicsBasicsIntroductionBasic PhysicsUnderwater sound2Sonar TheorySonar typesPosition EstimationSignal processing3Sonar ApplicationsFish findingHUGIN AUVMappingImaging4Sept. 20112 / 76IntroductionHistoryOutline1SonarSOund Navigation And RangingIf you cause your ship to stop and placethe head of a long tube in the water andplace the outer extremity to your ear, youwill hear ships at a great distance fromyou.Leonardo da Vinci, 14901914 Fessenden: first active sonar system(detect iceberg 2 miles)SummaryImages from wikipedia.org.RH, INF-GEO4310 (Ifi/UiO)SonarSept. 20113 / 76RH, INF-GEO4310 (Ifi/UiO)SonarSept. 20114 / 76
Sonar BasicsIntroductionSonar BasicsThe masters in sonarIntroductionSimilar technologiesSONAR Sound Navigation And RangingRADAR Radio Detection And RangingMedical ultrasound, higher frequencies, shorter range and morecomplex mediumSeismic exploration, lower frequencies, more complex mediumFrom wikipedia.org.RH, INF-GEO4310 (Ifi/UiO)SonarSonar BasicsSept. 20115 / 76RH, INF-GEO4310 (Ifi/UiO)IntroductionSonarSonar BasicsLiteratureSept. 2011PhysicsBasic PhysicsCourse text: sonar introduction 2010.pdfSound is waves travelling in pressure perturbationsCourse presentation:inf-geo4310-2010-sonar-lecture.pdfOr: compressional wave, longitudal wave, mechanical waveThe acoustic vibrations can be characterized byXavier Lurton, An introduction to underwater acousticsSpringer Praxis, First edition 2002, Second edition 2010www.wikipedia.orgIIIII6 / 76IIIIsonarunderwater acousticsside-scan sonarbiosonar, animal echolocationbeamformingWave period T [s]Frequency f 1/T [Hz]Wavelength λ c/f [m]Sound speed c [m/s]Ocean Acoustics Library http://oalib.hlsresearch.com/RH, INF-GEO4310 (Ifi/UiO)SonarSept. 20117 / 76RH, INF-GEO4310 (Ifi/UiO)SonarSept. 20118 / 76
Sonar BasicsUnderwater soundSonar BasicsUnderwater soundGeometrical spreading loss - one wayThe acoustic wave expands asa spherical waveAcoustics is the only long range information carrier under waterThe pressure perturbations are very smallObtainable range is determined byIIThe acoustic intensitydecreases with range ininverse proportion to thesurface of the spherefree space loss and absorptionthe sensitivity to the receiverThe ocean environment affects sound propagation:IIIIThe acoustic wave amplitudeA decreases with range Rsea surfaceseafloortemperature and salinitycurrents and turbulenceThe intensity I A2In homogeneous mediaUnderwater sound propagation is frequency dependentI RH, INF-GEO4310 (Ifi/UiO)SonarSonar BasicsSept. 20119 / 76RH, INF-GEO4310 (Ifi/UiO)Sept. 201110 / 76Sept. 201112 / 76Underwater soundAbsorptionSeawater is a dissipative mediumthrough viscosity and chemicalprocessesAcoustic absorption in seawater isfrequency dependentThe reflected field expands asa spherical wave back to thereceiverLower frequencies will reach longerthan higher frequenciesIn homogeneous media, thetwo way loss becomesf [kHz]0.1110100100011 1 422R RRSonarSonarSonar BasicsThe acoustic wave expands asa spherical wave to thereflectorRH, INF-GEO4310 (Ifi/UiO)1R2Underwater soundGeometrical spreading loss - two wayI Underwater soundSept. 201111 / 76R [km]10001001010.1RH, INF-GEO4310 (Ifi/UiO)λ [m]151.50.150.0150.0015Sonar
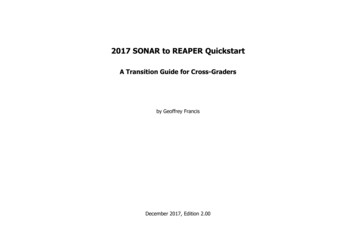
Sonar BasicsUnderwater soundSonar BasicsTransmission lossUnderwater soundThe Ocean as Acoustic MediumTransmission loss is geometrical spread absorptionThe sound velocity - environmental dependencyLogarithmic (dB) scale: IdB 10 log10 (I)A certain frequency will have a certain maximum rangeLayering and refraction - waveguidesFrequency is a critical design parameterThe sea floor and the sea surface - scatteringNoise sourcesRH, INF-GEO4310 (Ifi/UiO)SonarSonar BasicsSept. 201113 / 76Underwater soundSonarSonar BasicsReflection and Refraction in AcousticsSept. 201114 / 76Underwater soundRefraction and the sound velocityRecall from first lecture on opticalimagingMedvins formula:c 1449.2 4.6T 0.055T 2 0.00029T 3The reflection angle is equal to theincident angle (1.34 0.010T )(S 35) 0.016DThe angle of refraction is given bySnell’s lawThe sound velocity depends on 3 major parts:Temperature T in degrees Celsiussin θ2sin θ1 c1c2Salinity S in parts per thousandDepth D in metersThe index of refraction n c2 /c1Snells law can be derived fromFermats principle or from thegeneral boundary conditionsRH, INF-GEO4310 (Ifi/UiO)RH, INF-GEO4310 (Ifi/UiO)SonarThe sound velocity contains information about the ocean environment.Example: T 12.5 C, S 35 ppt, D 100 m gives c 1500 m/sFrom WikipediaSept. 201115 / 76RH, INF-GEO4310 (Ifi/UiO)SonarSept. 201116 / 76
Sonar BasicsUnderwater soundSonar BasicsDeep sound velocity variationUnderwater soundSound refractionThe sound will refract towards areas of slower speedSOUND IS LAZYThe surface layerThe seasonal thermoclineThe permanent thermoclineThe deep isothermal layerRH, INF-GEO4310 (Ifi/UiO)SonarSonar BasicsSept. 201117 / 76RH, INF-GEO4310 (Ifi/UiO)Underwater soundSonarSonar BasicsUnderwater sound channelSept. 201118 / 76Sept. 201120 / 76Underwater soundCoastal variabilitywaves are trapped in a guideThe energy spreads in one dimension instead of two I 1/RMuch longer rangeAcoustical Oceanography: Map the effect of the medium onunderwater acousticsFactors that affect soundpropagation:The sound velocity profileThe sea surfaceInternal wavesTurbulenceOcean currentRH, INF-GEO4310 (Ifi/UiO)SonarSept. 201119 / 76RH, INF-GEO4310 (Ifi/UiO)Sonar
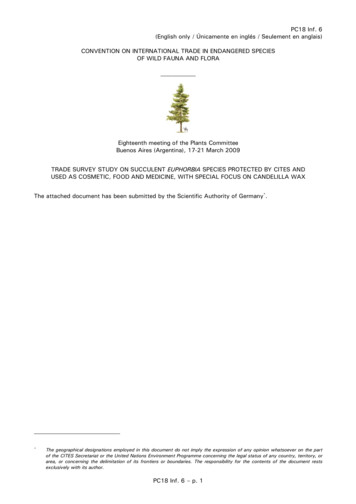
Sonar BasicsUnderwater soundSonar BasicsCoastal variabilityUnderwater soundReflection: basic physicsCharacteristic impedance Z0 ρcIIρ is the density [kg/m3 ]c is the sound speed [m/s]The characteristic impedance isa material propertyMaterialImpedanceAir415Seawater1.54 106Clay5.3 106Sand5.5 106Sandstone7.7 106Granite16 106Steel47 106Reflection coefficient (normalincidence)The sound is trapped in awaveguideThe boundaries of thewaveguide changes theproperties of the soundwaveR(f ) Z Z0Z Z0Transmission coefficient (normalincidence)T (f ) RH, INF-GEO4310 (Ifi/UiO)SonarSonar BasicsSept. 201121 / 762Z0Z Z0RH, INF-GEO4310 (Ifi/UiO)Underwater soundSonarSonar BasicsReflection: the sea surfaceSept. 201122 / 76Sept. 201124 / 76Underwater soundReflection: the sea floor (or bottom)The sea floor (sea-bottom interface)Sand: Z 5.5 106The sea surface (sea-air interface)Seawater: Z0 1.54 106Air: Z 415Reflection coefficientSeawater: Z0 1.54 106Reflection coefficientR R Z Z0 1Z Z0Sandy seafloors partially reflects,partially transmitsThe sea surface is a perfect reflectorRH, INF-GEO4310 (Ifi/UiO)SonarZ Z0 0.56Z Z0Estimated reflection coefficient canbe used in classification of bottomtypeSept. 201123 / 76RH, INF-GEO4310 (Ifi/UiO)Sonar
Sonar BasicsUnderwater soundSonar BasicsScattering - smooth surfacesUnderwater soundScattering - rough surfacesScattering from rough surfacesScattering from rough surfacesThe sea surfaceThe sea surfaceThe seafloorThe seafloorOther scattering sourcesOther scattering sourcesVolume scattering fromfluctuationsVolume scattering fromfluctuationsScattering from marine lifeScattering from marine lifeA smooth surface gives mainly specular reflectionRH, INF-GEO4310 (Ifi/UiO)SonarSonar BasicsA rough surface gives specular reflection and diffuse scatteringSept. 201125 / 76RH, INF-GEO4310 (Ifi/UiO)Underwater soundSonarSonar BasicsAmbient NoiseSept. 201126 / 76Underwater soundMarine Life and AcousticsThe ocean is a noisy environmentHydrodynamicITides, ocean current, storms,wind, surface waves, rainDolphins and whales use acousticsfor echolocation and communication.SeismicIWhale songs are in the frequencybetween 12 Hz and a few kHz.Movement of the earth(earthquakes)Dolphins use a series of highfrequency clicks in the range from50 to 200 kHz for echolocation.BiologicalIProduced by marine lifeMan madeIFrom wikipedia.org. Courtesy of NASA.Shipping, industryFrom wikipedia.org. Author Zorankovacevic.RH, INF-GEO4310 (Ifi/UiO)SonarSept. 201127 / 76RH, INF-GEO4310 (Ifi/UiO)SonarSept. 201128 / 76
TheoryTheoryOutline1BasicsIntroductionBasic PhysicsUnderwater sound2Sonar TheorySonar typesPosition EstimationSignal processing3Sonar ApplicationsFish findingHUGIN AUVMappingImaging4SummaryRH, INF-GEO4310 (Ifi/UiO)Sonar typesActive sonarTransmits a signalThe signal propagates towards theobject of interestThe signal is reflected by the targetThe signal is recorded by a receiverSonarTheorySept. 201129 / 76RH, INF-GEO4310 (Ifi/UiO)Sonar typesSonarTheoryActive sonarSept. 201130 / 76Sept. 201131 / 76Sonar typesPassive sonarPassive sonar only records signalsTransmits a signalThe signal propagates towards theobject of interestThe signal is reflected by the targetThe signal is recorded by a receiverRH, INF-GEO4310 (Ifi/UiO)SonarSept. 201130 / 76RH, INF-GEO4310 (Ifi/UiO)Sonar
TheoryPositioningTheoryRange EstimationRange ResolutionThe minimum distance two echoes can be seperatedRelated to the pulse length Tp for non-coded pulsesEstimation of time delay (or two way travel time) τRelate time delay to rangecTp2Related to bandwidth B for coded pulsescδR 2BδR cτR 2Sound velocity must be knownRH, INF-GEO4310 (Ifi/UiO)PositioningSonarTheorySept. 201132 / 76RH, INF-GEO4310 (Ifi/UiO)PositioningSonarTheorySept. 2011PositioningPulse forms 1 - active sonarPulse forms 2 - active sonarDifferent pulse forms for different applicationsGated Continuous Wave (CW)Simple and good Doppler sensitivity but does not have high BTLinear Frequency Modulated (LFM) (or chirp)Long range and high resolution but cannot handle DopplerDifferent pulse forms for different applicationsHyperbolic Frequency Modulated (HFM) pulsesLong range and high resolution and Doppler resistivePseudo Random Noise (PRN) BPSK Coded CWHigh resolution and good Doppler sensitivity but low efficiencyRH, INF-GEO4310 (Ifi/UiO)SonarSept. 201134 / 76RH, INF-GEO4310 (Ifi/UiO)33 / 76SonarSept. 201135 / 76
ng estimation - arbitrary Rx positionsTransducers (or antennas or loudspeakers) are directiveDirection of arrival can be calculated from the time difference ofarrival 1 cδtθ sinLThe beamwidth (or field of view) of a disc of size D isβ λDThe beamwidth is frequency dependent. Higher frequency givesnarrower beam.RH, INF-GEO4310 (Ifi/UiO)SonarTheorySept. 201136 / 76PositioningSept. 201137 / 76PositioningBearing estimation - array sensorBy delaying the data from each element in an array, the array canbe steered (electronically)SonarSonarTheoryBearing estimation - array sensorRH, INF-GEO4310 (Ifi/UiO)RH, INF-GEO4310 (Ifi/UiO)Sept. 201138 / 76Direction of arrival from several reflectors can be estimated byusing several receivers.RH, INF-GEO4310 (Ifi/UiO)SonarSept. 201139 / 76
TheoryPositioningTheoryImaging sonar / beamformingPositioningBeamforming definedEcho location is estimation of range and bearing of an echo (ortarget)BeamformingImaging sonar is to produce an image by estimating the echostrength (target strength) in every direction and rangeProcessing algorithm that focus the array’s signal capturing ability in aparticular directionAlgorithmBeamforming is spatio-temporal filteringfor all directionsfor all rangesestimate echo strenght in each pixelendendBeamforming turns recorded time series into images(from time to space)RH, INF-GEO4310 (Ifi/UiO)SonarTheoryBeamforming can be applied to all types of multi-receiver sonars:active, passive, towed array, bistatic, multistatic, synthetic apertureSept. 201140 / 76RH, INF-GEO4310 (Ifi/UiO)PositioningSonarTheoryBeamforming algorithm in time domainSept. 201141 / 76PositioningImaging sonar resolutionAlgorithmRange resolution given bypulse length (actuallybandwidth)for all directionsfor all rangesfor all receiversCalculate the time delayInterpolate the received time seriesApply appropriate amplitude factorendsum over receivers and store in result(x,y)endendAzimuth resolution given byarray length measured inwavelengthsField of view is given byelement length measuredin wavelengthsArray signal processing in imaging is the primary topic in INF 5410RH, INF-GEO4310 (Ifi/UiO)SonarSept. 201142 / 76RH, INF-GEO4310 (Ifi/UiO)SonarSept. 201143 / 76
TheoryPositioningTheoryImaging: Performance measuresSignal processingSonar signal modelDetail resolutionGeometrical resolution - minimum resolvable distanceContrast resolutionValue resolution, echogenicity, accuracyTemporal resolutionNumber of independent images per unit timeDynamic rangeResolvability of small targets in the presence of large targetsSensitivityDetection ability of low level targetsRH, INF-GEO4310 (Ifi/UiO)SonarTheorySept. 201144 / 76RH, INF-GEO4310 (Ifi/UiO)SonarSignal processingTheoryActive sonar processingSept. 201145 / 76Signal processingThe sonar equationThe sonar equation is an equation for energy conservation forevaluation of the sonar system performace.In its simplest form: Signal Noise Gain ThresholdThe basic active sonar processingconsists ofMore detailed (for active sonar):SL 2TL TS NL DI PG RTPreprocessingPulse compression (range)SL is source levelBeamforming (azimuth)TL is transmission lossDetectionTS is target strenghtParameter estimation - positionNL is noise levelClassificationDI is directivity indexPG is processing gainRT is reception thresholdRH, INF-GEO4310 (Ifi/UiO)SonarSept. 201146 / 76RH, INF-GEO4310 (Ifi/UiO)SonarSept. 201147 / 76
ApplicationsApplicationsOutline1234Fish findingEchosoundersBasicsIntroductionBasic PhysicsUnderwater soundThe echosounder is orientedverticallySonar TheorySonar typesPosition EstimationSignal processingThe target strength is estimated inevery range (depth)Sonar ApplicationsFish findingHUGIN AUVMappingImagingThe target strength is related to fishsize (biomass)The ship moves forward to make a2D map of fish densityDifferent frequencies can be usedfor species characterisationSummaryRH, INF-GEO4310 (Ifi/UiO)SonarApplicationsSept. 201148 / 76RH, INF-GEO4310 (Ifi/UiO)Fish findingSonarApplicationsStock abundance and species characterisationSept. 201149 / 76Sept. 201151 / 76Fish findingFish detection rangeModern echosounderscan detect a single fishat 1000 m range.Some fish have aswimbladder (air filled)which gives extra largetarget strengthFrom www.simrad.com.Courtesy of Kongsberg MaritimeFrom www.simrad.com. Courtesy of Kongsberg MaritimeRH, INF-GEO4310 (Ifi/UiO)SonarSept. 201150 / 76RH, INF-GEO4310 (Ifi/UiO)Sonar
ApplicationsHUGIN AUVApplicationsThe HUGIN autonomous underwater vehicleHUGIN AUVThe HUGIN autonomous underwater vehicleFree swimming underwater vehiclePreprogrammed (semi-autonomous)Used primarily to map and image the seafloorRuns up to 60 hours, typically in 4 knots (2 m/s)Maximum depth: 1000, 3000, 4500 mRH, INF-GEO4310 (Ifi/UiO)SonarApplicationsSept. 201152 / 76RH, INF-GEO4310 (Ifi/UiO)HUGIN AUVSonarApplicationsSept. 201153 / 76MappingMultibeam echosoundersAcoustic sensors on HUGINMultibeam echosounders maps the seafloor by estimating therange in different directionThe map resolution is determined by the 2D beamwidth and therange resolutionMultibeam echosounderImaging sonarAltimeterAnti collision sonarDoppler velocity loggerSubbottom profilerAcousticcommunicationsRH, INF-GEO4310 (Ifi/UiO)SonarSept. 201154 / 76RH, INF-GEO4310 (Ifi/UiO)SonarSept. 201155 / 76
ApplicationsMappingApplicationsMBE Example 1MBE Example 2Data collected by HUGIN AUVMaps from the Ormen Lange fieldThe ridge is 900 m long and 50 m high.Data collected by HUGIN AUVMaps from the Ormen Lange fieldThe peaks are 50 m highCourtesy of Geoconsult / Norsk Hydro.RH, INF-GEO4310 (Ifi/UiO)MappingCourtesy of Geoconsult / Norsk Hydro.SonarApplicationsSept. 201156 / 76RH, INF-GEO4310 (Ifi/UiO)MappingSonarApplicationsMBE Example 3Sept. 201157 / 76Sept. 201159 / 76MappingMBE Example 3Data collected by HUGIN AUVExample area with large sand ripplesHull mounted MBE70 - 100 kHzMagic T (Mills cross) layoutFrom www.simrad.com. Courtesy of Kongsberg MaritimeCourtesy of Kongsberg Maritime / FFI.RH, INF-GEO4310 (Ifi/UiO)SonarSept. 201158 / 76RH, INF-GEO4310 (Ifi/UiO)Sonar
ApplicationsMappingApplicationsMBE Example 4ImagingSidescan sonarHull mounted MBE70 - 100 kHzColour coded seafloor heightSidescan sonar: sidelooking sonar to image the seafloorTypical platform: towfish, hull mounted, AUVAn image is created by moving and stacking range linesTypically frequency 100 kHz - 500 kHzTypical range 100 - 500 mFrom www.simrad.com. Courtesy of Kongsberg MaritimeRH, INF-GEO4310 (Ifi/UiO)SonarApplicationsSept. 201160 / 76RH, INF-GEO4310 (Ifi/UiO)ImagingSonarApplicationsSidescan sonar area coverageSept. 201161 / 76Sept. 201163 / 76ImagingSidescan sonar exampleRange resolution is given by the pulse length (or bandwidth)Along-track resolution is range dependentImage collected by HUGIN AUV. Courtesy of Kongsberg Maritime / FFIRH, INF-GEO4310 (Ifi/UiO)SonarSept. 201162 / 76RH, INF-GEO4310 (Ifi/UiO)Sonar
ApplicationsImagingApplicationsSynthetic aperture sonar principleImagingSynthetic aperture sonar principleThe length of the synthetic aperture increases with rangeAlong-track resolution becomes independent of rangeAlong-track resolution becomes independent of frequencyCollect succesive pulses in a large synthetic array (aperture)Increase the azimuth (or along-track) resolutionRequires accurate navigation - within a fraction of a wavelengthRH, INF-GEO4310 (Ifi/UiO)SonarApplicationsSept. 201164 / 76ImagingSept. 201165 / 76Sept. 201167 / 76ImagingResolution mattersImage collected by HUGIN AUV. Courtesy of Kongsberg Maritime / FFISonarSonarApplicationsSidelooking Example - very high resolution (SAS)RH, INF-GEO4310 (Ifi/UiO)RH, INF-GEO4310 (Ifi/UiO)Image collected by HUGIN AUV. Courtesy of Kongsberg Maritime / FFISept. 201166 / 76RH, INF-GEO4310 (Ifi/UiO)Sonar
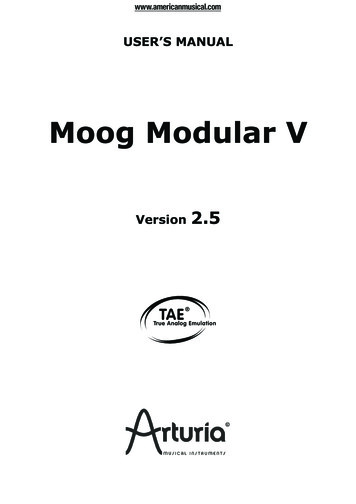
ApplicationsImagingApplicationsExample: Fishing boatImagingProperties in a sonar imageGeometry: Rangeand elevationResolutionRandom variability speckleSignal to noiseObject highlight andshadowImage collected by HUGIN AUV. Courtesy of Kongsberg Maritime / FFIRH, INF-GEO4310 (Ifi/UiO)SonarApplicationsSept. 201168 / 76RH, INF-GEO4310 (Ifi/UiO)ImagingSonarApplicationsExample large scene with small objectsSept. 201169 / 76ImagingComparison of sonar image with optical imageSonar range: 112 mOptical range: 4.5 mImage collected by HUGIN AUV. Courtesy of Kongsberg Maritime / FFIImage collected by HUGIN AUV. Courtesy of Kongsberg Maritime / FFIRH, INF-GEO4310 (Ifi/UiO)SonarSept. 201170 / 76RH, INF-GEO4310 (Ifi/UiO)SonarSept. 201171 / 76
ApplicationsImagingSummaryComparison of sonar image with optical imageOutline1BasicsIntroductionBasic PhysicsUnderwater sound2Sonar TheorySonar typesPosition EstimationSignal processing3Sonar ApplicationsFish findingHUGIN AUVMappingImaging4SummarySonar range: 73 mOptical range: 5 mImage collected by HUGIN AUV. Courtesy of Kongsberg Maritime / FFIRH, INF-GEO4310 (Ifi/UiO)SonarSept. 201172 / 76RH, INF-GEO4310 (Ifi/UiO)SummarySonarSept. 201173 / 76Sept. 201175 / 76SummarySummaryPå NorskAcoustics is the only long ranging information carrier under waterSound velocity variations cause refraction of acoustic descan sonarmultibeam echosounderThe ocean is lossy: higher frequencies have shorter rangeSONAR is used forIIIpositioningvelocity estimationcharacterisationApplications:IIIIFish findingImaging of the seafloorMapping of the seafloorMilitaryRH, INF-GEO4310 (Ifi/UiO)SonarSept. 201174 / 76RH, INF-GEO4310 tningekkoloddsidesøkende sonarmultistråle ekkolodd
RH, INF-GEO4310 (Ifi/UiO) Sonar Sept. 2011 14 / 76 Sonar Basics Underwater sound Reflection and Refraction in Acoustics Recall from first lecture on optical imaging The reflection angle is equal to the incident angle The angle of refraction is given by Snell’s law sin 1 c1 sin 2 c