Transcription
Introduction toROBOTICSHowie ChosetCopyright 2015. Howie Choset. All Rights Reserved
Are robots a good? 322 BC – Aristotle, a Greek philosopher,wrote “If every tool, when ordered, or evenof its own accord, could do the work thatbefits it. then there would be no needeither of apprentices for the master workersor of slaves for the lords.”Copyright 2015. Howie Choset. All Rights Reserved
?ROBOTSCopyright 2015. Howie Choset. All Rights Reserved
robot: (noun) Insert image hereCopyright 2015. Howie Choset. All Rights ReservedWhat is a robot?
Humanoid FormCopyright 2015. Howie Choset. All Rights Reserved
Boston Dynamics Petman/AtlasCopyright 2015. Howie Choset. All Rights Reserved
Copyright 2015. Howie Choset. All Rights Reserved
Copyright 2015. Howie Choset. All Rights Reserved
Archeology (Bard, Fattovich, El-Maguid,Hawass)Copyright 2011, H. Choset.Carnegie Mellon UniversityCopyright 2015. Howie Choset. All Rights Reserved
Remove the MonumentsCopyright 2015. Howie Choset. All Rights Reserved
UNIVERSITY RESPONSESpar CatcherRib carrierSpar HolderSkin carrier robotsRib carrierSpar CatcherActive/Passive ComplianceLadderCopyright 2015. Howie Choset. All Rights ReservedUniversal OmnibaseDeployable Arm
Proof of Concept IdeaCopyright 2015. Howie Choset. All Rights Reserved
Copyright 2015. Howie Choset. All Rights Reserved
Apples and Oranges USDA Specialty Crop Research Initiative First round (Fall 2008) 28M awarded Two Robotics Institute-led efforts won 10M total– Comprehensive Automation for Specialty Crops Sanjiv Singh, PI 6M / 4 years Apples and horticultural stock– Integrated Automation for Sustainable Specialty Crop FarmingProject Tony Stentz and Herman Herman, PIs 4M / 3 years OrangesCopyright 2015. Howie Choset. All Rights Reserved
VisionHoiem, Efros, and Hebert"Automatic Photo Pop-up"ACM SIGGRAPH 2005.Finds coarse 3D shapefrom asingle image!Copyright 2015. Howie Choset. All Rights Reserved
Dynamic SeethroughsKanade, SheikhCopyright 2015. Howie Choset. All Rights Reserved
Drug DiscoverySchneiderCopyright 2015. Howie Choset. All Rights Reserved
CosmologySchneiderCopyright 2015. Howie Choset. All Rights Reserved
There is no widelyaccepted definition ofwhat a robot is.Copyright 2015. Howie Choset. All Rights Reserved
Is this a robot?Copyright 2015. Howie Choset. All Rights Reserved
Are we there yet?Copyright 2015. Howie Choset. All Rights Reserved
Urban ChallengeCopyright 2015. Howie Choset. All Rights Reserved
The TeamCopyright 2015. Howie Choset. All Rights Reserved
Self-driving Google CarCopyright 2015. Howie Choset. All Rights Reserved
DARPA Rescue ChallengeCopyright 2015. Howie Choset. All Rights Reserved
DARPA Rescue ChallengeCopyright 2015. Howie Choset. All Rights Reserved
DARPA Rescue ChallengeCopyright 2015. Howie Choset. All Rights Reserved
GoogleCopyright 2015. Howie Choset. All Rights Reserved
GoogleBoston DynamicsBot and DollyAutofusHolonomiMeka RoboticsRedwood RoboticsIndustrial PerceptionSchaftCopyright 2015. Howie Choset. All Rights Reserved
Humanoids will Take OverCopyright 2015. Howie Choset. All Rights Reserved
nologies:PerceptionApplications:Intelligence VisionActionSpeech recog’n Search image databasesMotion planning Public health early warningAstronomical surveyLocalizationWatch miceNavigationTutor beginning readersDynamic balance Museum guideGait recognition Watch for customersFace recognition Video gamesBehavior recog’n Movie and TV animationModel protein structure.SurgeryCopyright 2015. Howie Choset. All Rights ReservedVacuuming.
Carnegie Mellon 10,000 students 320M sponsored research History of leadership in Management, ComputerScience, Statistics, Psychology, Engineering, Drama,Art, . and Robotics! Of top 25, the youngest, almost smallest. Values:– We work.– We build.– We test.– We collaborate.Copyright 2015. Howie Choset. All Rights Reserved
Carnegie MellonDramaMCS(Sci)SCS(Comp)Copyright 2015. Howie Choset. All Rights ReservedCIT(Eng)Tepper(Bus)
Carnegie obotics)Copyright 2015. Howie Choset. All Rights ReservedCIT(Eng)MLD(Learning)Tepper(Bus)HCII (ppl)
Carnegie obotics)Founded 35 years ago as a research institute.The first Robotics Department, for 30 years.– Still more of a research institute– PhD, MS, MRSD, BS2, Minor, FIRST, K-12, preK,“The unquestioned worldwide leader in roboticsCopyright 2015. Howie Choset. All Rights ReservedCIT(Eng)MLD(Learning)Tepper(Bus)HCII (ppl)
Carnegie obotics)Founded 35 years ago as a research institute.The first Robotics Department, for 30 years.– Still more of a research institute– PhD, MS, MRSD, BS2, Minor, FIRST, K-12, preK,“The unquestioned worldwide leader in roboticsCopyright 2015. Howie Choset. All Rights ReservedCIT(Eng)MLD(Learning)Tepper(Bus)HCII (ppl)About 700 researchers15% faculty (2/3 on soft )25% graduate students,45% technical staff,15% visiting faculty/postdocs.Sponsored research budget: 100MM (2X7.25 years in real )
Carnegie obotics)CIT(Eng)MLD(Learning)Tepper(Bus)HCII (ppl)About 700 researchers15% faculty (2/3 on soft )25% graduate students,45% technical staff,15% visiting faculty/postdocs.Copyright 2015. Howie Choset. All Rights ReservedSponsored research budget: 100MM (2X7.25 years in real )
Carnegie ht 2015. Howie Choset. All Rights II (ppl)AbrahamAckleyAdams.
Carnegie ht 2015. Howie Choset. All Rights II (ppl)AbrahamAckleyAdams.
Carnegie ht 2015. Howie Choset. All Rights ReservedUniv. of PittTepper(Bus)CIT(Eng)MLD(Learning)GraphicsHCII (ppl)AbrahamAckleyAdams.
Boeing CaterpillerCarnegie MellonUniv. of PittFoxconn GM SAICDisney Intel ht 2015. Howie Choset. All Rights II (ppl)AbrahamAckleyAdams.
Martial HebertCopyright 2015. Howie Choset. All Rights Reserved
Large Robotics ActivityCopyright 2015. Howie Choset. All Rights Reserved
RI research foci Manufacturing– Planning, layout, scheduling, safety, monitoring, . Field Robotics– Space, Security, Vehicles, Mining, Agriculture, Nuclear, . Vision, perception in general– Faces, outdoor terrain, scene understanding, . Manipulation and Motion Planning Machine Learning Mapping Aerial Robotics Medical Graphics, computer generated animation– Fluids, soft tissues, motion capture, hands, . Human robot interaction– Education, behavior recognition, dancing, . Novel mechanisms Copyrightand2015.more. haptics,snakes, humanoids, logistics .Howie Choset.All Rights Reserved
Robotics InstituteGraduate Activities CoursesPhDMS in RoboticsMS in VisionMRSDRoboORGCopyright 2015. Howie Choset. All Rights Reserved
Robotics InstituteUndergraduate Activities CoursesRobotics MajorRobotics MinorFifth Year MS ProgramRobotics ClubOn-campus competitions: Mobot!Copyright 2015. Howie Choset. All Rights Reserved
Fill out File Card NameEmailMajorActing Major (Green – CS/ Yellow ECE/ OrangeME)Enrolled/WaitlistFavorite robot movieWhy are you taking this classDraw a robot (on back)Copyright 2015. Howie Choset. All Rights Reserved
Robotics and Related Courses(Circa 4-5 Years Ago, More or Less)807060# classes50Secondary GradSecondary UG40Primary GradPrimary UG3020100Copyright 2015. Howie Choset. All Rights Reserved
Robotics MinorRequirementsOverview/Introductory CourseControlsManipulationTwo electivesChoose among16-311 Introduction to Robotics18-370 Fundamentals of Control,24-451 Feedback Control Systems16-299 Introduction to Feedback ControlSystems15-384 Manipulation24-355 Kinematics and Dynamics ofMechanisms (not offered regularly)Long list, see a subset belowAn upper-level RI courseUp to one independent studyWe have a very liberal view toward electives. Web site has descriptions. List is constantly changing because classes are offered and cancelled.· 10-601: Machine Learning· 16-421: Vision Sensors· 11-344: Machine Learning in Practice· 16-861: Mobile Robot Design· 15-491: CMRoboBits:· 16-865: Advanced Mobile Robot Development· 15-494: Cognitive Robotics· 18-342: Fundamentals of Embedded Systems *· 15-385: Computer Vision· 18-348: Embedded System Engineering *· 15-462: Computer Graphics· 18-349: Embedded Real-Time Systems *· 15-862: Computational Photography· 18-578: Mechatronic Design· 16-362 / 16-862: Introduction to Mobile Robot· 24-491 / 24-492: Departmental Research HonorsProgramming24-673:Special Topics in Soft Robots - Mechanics,Copyright 2015. Howie Choset.·AllRights Reserved24-675: Micro/Nano Robotics· 48-787: Architectural Robotics· 85-370: Perception· 85-382: Consciousness and Cognition· 85-395: Applications of Cognitive Scienc· 85-412: Cognitive Modeling· 85-419: Introduction to ParallelDistributed Processing· 85-420: Perception and PerceptualDevelopment
Requirements (10 classes)Overview/IntroductoryCourseChoose amongControls18-370 Fundamentals of Control,24-451 Feedback Control Systems16-299 Introduction to Feedback Control SystemsKinematics15-384 Manipulation (possibly rename to Kinematics and Dynamics of Motion and give it a 16number)24-355 Kinematics and Dynamics of Mechanisms (not offered regularly)Machine Perception15-385: Computer Vision16-421: Vision Sensors85-370: PerceptionCognition and Reasoning10-601: Undergraduate Machine Learning15-381: Artificial Intelligence15-494: Cognitive RoboticsUpper-level RI planning course with instructor permission“Hands-on Course”15-491: CMRobotBits: Creating Intelligent Robots16-362: Mobile Robot Programming Lab18-578: MechatronicsUpper-level RI project course like 16-861 or 16-865Independent study with instructor permissionTwo ElectivesSee list with minor or any upper level RI course. Any of these can be independent study but onlyone independent study is allowed. A student can also take additional courses from the core; e.g.,a student who takes 15-385 as a core can take 16-421 as an elective16-311 Introduction to RoboticsTo be developedSystems EngineeringTo be developedCapstone CourseCopyright 2015. Howie Choset. All Rights Reserved
Introduction to RoboticsCopyright 2015. Howie Choset. All Rights Reserved
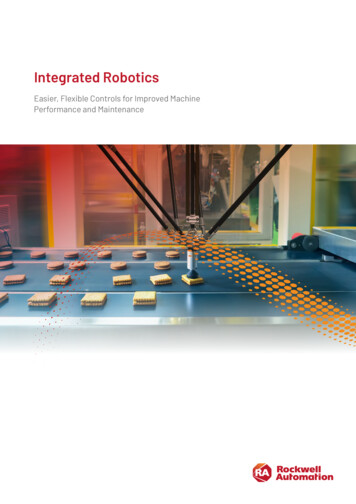
The Categories Are .ComputerScienceElectricalMechanicalEngineering EngineeringSensePlanActBuildProgramDebugCopyright 2015. Howie Choset. All Rights Reserved
This semester we will study many aspects of robotics.VisionControlsMotion PlanningSensors and Sensor PlanningMobile Robot PlatformsForward KinematicsInverse KinematicsNon-Holonomic constraintshttp://generalrobotics.orgCopyright 2015. Howie Choset. All Rights Reserved
High Workload Lots of homework First HW assignment handed out today Second HW assignment handed outWed Work responsibly Time consuming design experience If you cannot make a demo, mustdemo before due date Lots of work assigned around Carnivaltimes Another design experience No superbowl/Stanley Cup/etc excuses Programming ExamsCopyright 2015. Howie Choset. All Rights Reserved
HW 1See web siteDue at beginning of class Tuesday, January 21rd fix date on web siteCreate a webpage containing your text answers (and any pictures) in HTML format.Find a picture of a robot, not from Carnegie Mellon, on the web and display it. Comment on its application in terms ofsense, plan, and act. As a student of Carnegie Mellon you get free webspace, click here to find out how to use it.Program: Matrix-Vector EvaluatorWrite a program that runs under unix to perform 3x1 vector and 3x3 matrix arithmetic. The program should take from standard input one line at a time a sequence of expressions, described below. A line with nothing on it should do nothing. The command END should terminate the program. The following are the commands to be defined: For vectors, a lower case letter followed by an '' sign, and then followed by three numbers sets the value for thevector. For matrices, an upper case letter, followed by an '' sign, and then followed by nine numbers sets the valuefor a matrix. To make things easier, assume there could only be 26 vectors and 26 matrices. Hint: there is a nicerelationship between chars and ints in C.––Vector and Matrix instantiation.Printing. A vector or matrix on a line by itself followed by return should print the vector or matrix in their appropriate forms. c a b ------ store the sum of a and b into c. C A B ------ store the sum of A and B into C.––Addition.Multiplication c a.b ----- should compute the dot product of a and b and store in it in the first component of c. (Set the othercomponents of c to zero) c a*b ----- store the cross product of a and b in c C A*B ----- perform matrix multiplication of A and B v M*x ----- perform the matrix-vector multiplication.Copyright 2015. Howie Choset. All Rights Reserved
Some strict rules Attendance not mandatory, punctuality is, texting is forbidden No late HW assignments accepted, your printer or dog eating your HW isnot an excuse Demos start on-time (early), your responsibility to make it work (memorystick, etc) Absence from a demo receives a zero Lowest HW grade dropped, if you get all the HW’s in at the end ofsemester, except HW 1 and 2 Exams: 8.5 x 11 sheet of paper, both sides, in your hand Cannot take this class if it overlaps with another Miscommunications must be cleared up before demo day Three strikes on mess– Strike 1: you lose your ability to drop the lowest HW score– Strike 2: your team gets 0’s– Strike 3: you are out of the classCopyright 2015. Howie Choset. All Rights Reserved
Tuesdays/Thursdays Tuesdays are a must Thursdays “backup” day?Copyright 2015. Howie Choset. All Rights Reserved
Meet the TA’sCopyright 2015. Howie Choset. All Rights Reserved
Waitlist people Motivated students usually get inCopyright 2015. Howie Choset. All Rights Reserved
What to ExpectCopyright 2015. Howie Choset. All Rights Reserved
Two Robotics Institute-led efforts won 10M total – Comprehensive Automation for Specialty Crops Sanjiv Singh, PI 6M / 4 years Apples and horticultural stock – Integrated Automation for Sustainable Specialty Crop Farming Project Ton