Transcription
FOR fUMHR M4THEORETICAL AND EXPERIMENTAL METHODSSIN THE SO-LUTION -OF MISSILE NONLINEAR,ROLL PROBLEMSI,t-U - WarfETEfl DAMILSAMUL R.' HAIYare Anals DePartment,LLJANUARY17J2 Fop ;unH sd,L,,o r nNAAL, SUIRF ACf,, :WEfAPO N S- CENTER// A 1 P NkA'ATYOfret, Vir9injo 1Z448,WHITE 0-K ARA siver Sort) Mbr "Id 2W40'I7 4
UNCLASSIFIEDSECUflITY CLASSIFICATIONOF THIS PAGE (When Data Entered)READ INSTRUCTIONSREPORT DOCUMENTATION PAGEI.REPORT NUMBERBEFORE COMPLETING FORM2. GOVT ACCESSION NO.TR-3773I4.TITLE (and Subtitle)3.RECIPIENT'S CATALOG NUMBERS.TYPE OF REPORT A PERIOD COVEREDTHEORETICAL AND EXPERIMENTAL UETH0DS IN THE./ OFOLTIONOF.,3i 6. PERFORMINGSOLUTIONMISSILE NONLINEAR ROLLPROBLEMS,SR-7.kUTHOR()S.(4jPeter iba5-nS9.CONTRACT OR GRANT NUMBER(@)1Samuel R./H-ardyPERFORMING ORGANIZATION NAME AND ADDRESS/Dalilgren Laboratory (CK-2 1)AND ADDRESSTEt2M.i#9Naval Surface Weapons CenterDahlgren LaboratoryIT"NGMBER'O"GES66Dahligren, VA 2244814.10. PROGRAM ELEMENT. PROJECT, TASKAREA & WORK UNIT NUMBERSNaval Surface Weapons CenterDahlgren, VA 2244811. CONTROLLING OFFICE NAMEORG. REPORT NUMBERMONITORING AGENCY NAME & ADDRESS(if different from Controfllng Office)Naval Air Systems CommandWashington, DC 20360F( I-15. SECURITY Clb,.,arthua roort)UNCLASSIFIEDDECLASSIFICATION/ DOWNGRADING[15.SCHEDULE16.DISTRIBUTION STATEMENT (of tiA!Report)/ 1Approved for public release; distribution unlimited.-) "////17. DISTRIBUTION STATEMENT (of the abstract entered In Block 20, If different from Report)18. SUPPLEMENTARY NOTES19.KEY WORDS (Continue on reverse side If neceaay and Identify by block number)Missile nonlinear rollRolling motion theoryRoll rate stabilization26ABSTRACT (Continue on reverse aide If neceaary and Identify by block number)"This report is a comprehensive documentation of recently developed experimental andtheoretical methods dealing with the solution of free flight missile nonlinear roll problems.A unified approach to the development of a nonlinear rolling motion theory for finnedmissiles as well as a passive roll rate stabilization technique are describedFORMDDJAN 737 8147306EDITION OF I NOV 66 IS IFICATION OF THIS PAG E.(R.nDatantatad)
FOREWORDThiis report describes wvork directed towvard improving the science of free flightmissile dynamics by investigating the nonlinear rolling motion phenomena *exhibitcdby firned missiles.Thiis work was performed under AIRTASK AO3W-350D/004B-6F32-300-OO.Acknowledgement is due to WV. C. Volz, of the Naval Air Systems Command,who recoinmended comprehensive documentation of this research.This report was reviewed by Dr. F. G. Moore, Head, Aeromechanics Branch,and Mr. H. P. Caster, H-ead, Exterior Ballistics Division.Released by:white sectionmTIDCBufl Section[JrU NIANNONERALPH A. NIEMANN, HeadIJUSIFIATIN .Warfare Analysis DepartmentDISTRiBUrIDN/AVAILABiLIIT CODESDist.'-s-'an/W SPECIALAVA1CiL
TABLE OF CONTENTSpipeFOREWORD . . .NOMENCLATURE .LIST OF ILLUSTRATIONS .LIST OF TABLES .INTRODUCTION .LOW DRAG BOMB FLIGHT TRIALS AND NICOLAIDES RESEARCH .UNIFIED APPROACH TO A NONLINEAR ROLLING MOTION THEORY . .EXTRACTION OF NONLINEAR ROLL COEFFICIENTS .PASSIVE ROLL RATE STABILIZATION.ROLL RATF STABILIZED LOW DRAG BOMB .PRACTICAL APPLICATION .CONCLUSIONS .REFERENCES .DISTRIBUTIONiiivvii1I5122736384343
NOMENCLATUREA*Planform area of solid finin 2Al.Planform area of slotted finin 2CeRoll moment coefficientL/QSdCRoll moment coefficient derivativeaC 2 /a(rad - tCIIRestoring moment coefficientM/QSdCmRestoring moment coefficient derivativeacm a( ))rad- IC,Normal force coefficientZ/QSC,Normal force coefficient derivative3C /a( )rad-1-dReference diameterftIxRoll moment of inertiaslug/ft 2LRoll momentft/lbMRestoring momentft/lb', TRoll trim anglerad8Fin cant angleradpAir densityslug/ft3(01Nutation frequencyrad/secNSide momentft/lbiii
NoySide moment derivative due to rollorientation and angle of attackft-lb/rad 2pRoll raterad/secqPitching velocityrad/secQDynamic pressure 1/2 pV 2lb/ft2QConstantQSd/I xSReference areaft2VTotal velocityft/secZNormal forcelbaComplex angle of attackrad%Minimum angle of attack for roll lock-inrad7Roll orientation angle with respect to thecross component of the total velocityvectorradiv
LIST OF ILLUSTRATIONSFigI'234567891011pageSchematic of the Navy Low Drag Bomb.(MK 80 Series) .Characteristic Rolling Motion of Cruciform FinnedMissiles With Small Fin Cant .Schematic of Basic Finner Model .Induced Rolling Moment vs Roll Orientation Angle forBasic Finner Model Measured in Incompressible Flow .Induced Rolling Moment Coefficients vs Angle of Attackfor Basic Finner in Incompressible Flow .Hypothetical Damping Function That Can Account forRoll Break Out and Roll Speed Up .Steady State Spin vs Angle of Attack for theBasic Finner With and Without Fin Cant .Superposition of Roll Moment Due to Fin Cant onCubic Damping Function .Observed Roll Angular Data for Basic Finner Missile at450 Angle of Attack (Run 1) .Observed Roll Angular Data for Basic FinnerMissile at 450 Angle of Attack (Run 2) .Comparison of Computed and Observed Roll Angular237891011111313Data for Basic Finner Missile at 450 Angle12of Attack (Run 1) .Comparison of Computed and Observed Roll Angular16Data for Basic Finner Missile at 450 Angle131415161718of Attack (Run 2) .Wrap-Around-Fin Missile Configuration .Static Roll Moment Coefficient vs Angle of Attack forWAF and Basic Finner Configurations .Induced Roll Moment Coefficient vs Angle of Attack forWAF and Basic Finner Configurations .Linear Roll Damping Moment Coefficient vs Angle ofAttack for WAF and Basic Finner Configurations .Cubic Roll Damping Moment Coefficient vs Angle ofAttack for WAF and Basic Finner Configurations .Comparison of Computed and Observed Steady State RollRates for WAF Missile Configuration .v16171818191920
LIST OF ILLUSTRATIONS atic of Canard Controlled Missile Configuration .Extracted Linear Roll Damping Moment Coefficients vsAngle of Attack for Canard Controlled MissileConfigurations .Linear Roll Damping Moment Coefficient Variation WithRoll Angle vs Angle of Attack for the Canard ControlledMissile Configurations .Extracted Induced Roll Moment Coefficient vs Angle ofAttack for Canard Controlled Missile Configurations .Extracted Fin Cant Roll Moment Coefficients vs Angle ofAttack for Canard Controlled Missile Configurations .Extracted Mass/Aerodynamic Roll Moment AsymmetryCoefficients vs Angle of Attack for Canard ControlledMissile Configurations .Roll Rate vs Dynamic Stability for a Four Fin Missile .Schematic of Free-Spinning Cruciform Fins .Rotational Characteristics of CruciformRectangular Fins .Wind Tunnel Model (Naval Academy) .Steady-State Rolling Velocity vs Angle of Attack forNaval Academy Model With Solid Rectangular Fins.Fin Cant 0 .Steady-State Rolling Velocity vs Angle of Attack forNaval Academy Model With Solid Rectangular Fins.Fin Cant 8 .22232424252728292930.31Steady-State Rolling Velocity vs Angle of Attack forNaval Academy Model With Rectangular Fins and a32Steady-State Rolling Velocity vs Angle of Attack forNaval Academy Model With Rectangular Fins and allt.A.91. . . . . . . .Small SmSlot.AF/A* 0.691,8 8 . .Slot. A./A* 0.691, 5 00 .3321.Steady-State Rolling Velocity vs Angle of Attack forNaval Academy Model With Rectangular Fins and aSmall Slot. AF/A* 0.803 .vi31.32.33233
LIST OF ILLUSTRATIONS (Continued)343536373839404142Typical Effect of Slot on Induced Rolling Moment .Effect of Slot on Amplitude of Induced Rolling Moment .Schematic of the MK 81 Low Drag Bomb .WSMR Test Vehicle (MK 82/BSU-49B) .BSU-49B Fin Planform .Free Rolling Characteristics of Solid Fill Vehicle .Free Rolling Characteristics of Slotted Fill Vehicle .Effects of Fin Configuration on Stability .Release Envelope and Dynamic Stability Characteristics(NVSMR Test Vehicle With 100 Turning Wedges) .353536393940404142LIST OF TABLESTableI2PageAerodynamic Roll Moment CoefficientConsidered in Fits .Flight Conditions and Test Drops for theStandard Low-Drag Bomb and Modified Configuration .vii15.37
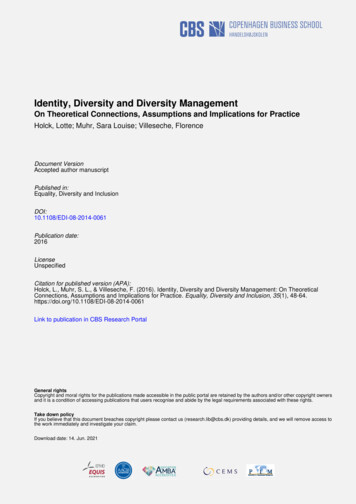
INTRODUCTIONIt had been shown, by the early 1950's,1,2,3 that the free-flight dynamicstability of finned missiles depended strongly upon roll rate. The concept of Magnusinstability had been developed earlier from the linear theory of missile dynamics,and Nicolaides 3 . had recently published his important linear theory of simple roll-yawresonance instability. However, during flight trials of the Navy low drag bomb, aninstability occurred that could not be explained by any known roll-yaw couplingtheory.This report summarizes research conducted by the Navy to understand thlisthird type of instability, now known as catastrophic yaw, and provide a solution tothis problem.LOW DRAG BOMB FLIGHT TRIALS AND NICOLAIDES' RESEARCHThe MK 80 series low drag bomb was designed after World War II by theDouglas Aircraft Company and flight-tested at the Naval Proving Ground 4 (now theNaval Surface Weapons Center, Dahlgren Laboratory). This particular bomb, whoseschematic is shown in Figure 1, was fabricated in the 250-lb class (MK 81), 500-lbclass (MK 82), 1000-lb class (MK 83), and 2000-lb class (MK 84). It is of interestto note that the MK 82, MK 83, and MK 84 are still fabricated in their originalconfiguration and used extensively by the armed services.Flight tests at the Naval Proving Ground revealed that the low drag bomboccasionally exhibited a severe instability of the nutation mode that could not beaccounted for by the linear theory (i.e., Magnus instability, or resonance instability).Nicolaides' 2,scription of this instability cannot be improved upon by these authors,and therefo-e a direct quote of his description is as follows from Reference 2."This particular dynamic instability, when it occurred, was first characterized bythe failue of the missile to pick up its fiul steady state rolling velocity and, then,by a catastrophic growth of the pitchhig and yawing motion. Initially the rollingvelocity increases due to the fin cant. However, when it reaches a value equal tothe nutation frequencyit holds constant and "locks in" at that particular valueinstead of seeking the much larger steady state value. Initially the size of thepitching amid yawing motion reduces. However, when the rolling motion locks i, it11
RK0z wi2L0U.000CDC,,ImA.m/m1 0000coccz0J 5n-J-JI
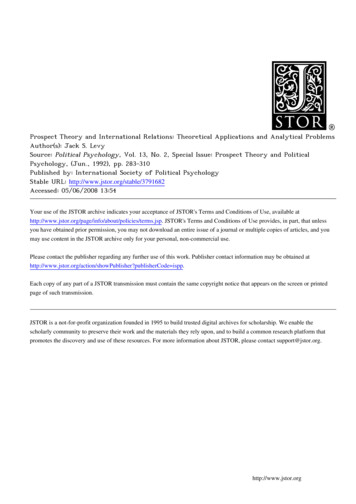
begins to grow and may very soon reach extreme values such that the missile illflight lookIv more like a propeller than zn arrow. This unique flat spin has beenitermed 'Catastrophic Yaw.'Since the missile's free flight rolling motion was so strongly affected, Nicolaidesfelt that wind tunnel tests of a free rolling model might be in order. Consequently,lie had constructed a sting mounted, free rolling model of the basic finner; astandard Navy research configuration consisting of a cone cylinder body withrectangular fins. Tests were conducted in the National Bureau of Standards windtunnel.S,6,7Nicolaides found that four-finned missiles exhibited five separate rollcharacteristics that he labeled "linear rolling motion," i.e., conforming to thc lineartheory of missile dynamics, roll "slow down," roll "lock in," roll "break out," androll "speed up." These roll characteristics depended upon the angle of attack andfin cant and are illustrated in Figure 2.LINEAR ROLLING MOTIONROLL SLOW DOWNROLL SPEED UPZ .0.II-lBREAK OUTROLL LOCK IN0ANGLE OF ATTACK C)90Figure 2. Characteristic Rolling Motion of Cruciform FinnedMissiles With Small Fin Cant3
In linear rolling motion, near zero yaw, the roll moment is proportional to thefin cant and rolling velocity and is independent of the angle of attack. However, itis found that as the angle of attack increases, the roll rate "slows down" mainlydue to a loss in fin cant effectiveness and "locks in;" i.e., the missile fails to rolland exhibits stable oscillations about a roll trim angle (yT), tending toward 450 as alimit. At higher angles of attack the missile exhibits unstable oscillation about theroll trim angle and "breaks out," thus developing large roll rates (roll speed up) ineither the positive or negative sense, and even against the fin cant moment.Nicolaides pointed out that the stable oscillations of the model in the "lockin" region suggested the existence of a roll moment that depended upon angle ofattack and roll orientation. A literature search revealed that this moment had beenmeasured earlier 2 , 8 "1 2 and for a four-finned missile takes the formL('ia) Lacsin 4,y(1)"Ie rediscovery of aerodynamic moments with a periodicity of 47y was the primaryfactor in explaining the plenomenon of catastrophic yaw. 13 For an example,consider the flight condition where a four-finned missile has a nutation frequencyequal to its rolling veJocity. Its roll orientation angle is constant. This unique typeof motion is called "lunar" because of its analogy to the motion of the moon. Inthis free-flight case where 6, a , p, and y are constant, the rolling equation ofmotion isLsb LPp L,ez sin 4-Y 0(2)The critical lock in angle of attack (aec ) or the roll trim angle (y'T)obtained from Equation (2) asc -(L 8 5 LPp)/IT.sin 47yare(3)and"T sin- I [ (L6 5 4LPp)/Ll Z ]/4(4)
Since 'YT is a constant for this condition, an additional aerodynamic derivativebecomes significant. This derivative is known as the induced side moment and canbe expressed in the following form for the cruciform finned missile:N(y,o) N-ya sin 4,y(5)The induced side moment acts perpendicular to the plane of the angle ofattack and can have a serious destabilizing influence.The phenomena of roll break out and roll speed up were at first attributed tov rtex shedding from the missile body onto the cruciform tail. 7 However, thistheory was abandoned when wind tunnel tests showed that a pure cruciform finsystem (no body) exhibited the same nonlinear rolling characteristic, i.e., roll slowdown, roll lock in, roll break out, and roll speed up. The nonlinear character of thecruciform fin system suggested that the speed up was induced by vortex sheddingfrom the fins. This experiment has since been verified from at least four different26sources. ,3 3Nicolaides was unable to develop a nonlinear rolling motion theory to accountfor roll break out and roll speed up. However, lie did suggest that the roll dampingmoment at high angles of attack was positive at low roll rates in order to accountfor unstable oscillations about the roll trim point in the break out and speed upregions.2UNIFIED APPROACH TO A NONLINEAR ROLLING MOTION THEORYIn the early 1960's, it became evident that further research was required inorder to design fin stabilized ordnance with satisfactory dynamic stabilitycharacteristics at high angles of attack. The problem of roll-yaw coupling instabilitieshad not been solved for fin span limited ordnance and was particularly acute for finstabilized, free fall, air launched ordnance ("bombs").A bomb must beasymmetry, usually dueapproaches the nutationwhere the trim angle ofspun in order to average out the effect of aerodynamicto manufacturing tolerances or lugs. If the spin ratefrequency (p - col), then resonance oscillations can occurattack due to asymmetry is amplified to a value inversely5
proportional to the total damping in the system. 1 3 Large coning motion, in excessof that predicted by resonance theory alone, can result if the bomb locks in at thelarge roll rates can trigger Magnusvresonance frequency (p w ) whereasinstability.Since bombs can experience large launch disturbances that often result in pitchangles greater than 600 in angle of attack and since the nonlinear character of theroll motion could not be accounted for by the roll equation of motion, dynamicstability analysis of bombs could not be conducted with any degree of confidence.For example, in the classical linear theoryaerodynamic roll coefficient for a particular a isofrollingmotionC2 (8,p) CQ 6 5 CpPd/(2V)the total(6)Nicolaides 1 3 postulated, and it was later shown 2 that there existed a periodic(thus, nonlinear) static roll coefficient (C2 f sin 4y) which could account for rolllock in. Consequently, the differential equation more recently used14 to describe thefree flight rolling motion of four-finned missiles at a particular a isIxP/QSd Ce ()6 C2 P(a)pd/2V C2 4 (a) sin 47,For the wind tunnel case with freedom only in roll,may be written aslJ/QSd C26 (a)6 C. (oxa)d/2V (7), p, and Equation (7)C24,(a) sin 4,y(8)However, at higher a's where the lock in becomes unstable and speed up occurs,this approximate equation cannot even qualitatively describe the phenomena.Consequently, a research study 1 5 was initiated in an attempt to provide a moreaccurate mathematical description of single degree of freedom rolling motion. Staticand dynamic wind tunnel tests were conducted to provide the information requiredin order to construct a more exact nonlinear rolling motion theory.6
The basic finner (see Figure 3) was tested in the Naval Ship Research andDevelopment Center's 7- X 10-ft subsonic wind tunnel.TT0.754200 25ALL DIMENSIONS IN FEET2.5ItFigure 3. Schematic of Basic Finner ModelThe static force data, measured with a strain-gage roll balance,induced static rolling moment coefficient C,(') is sinusoidal only athighei a's, it approaches a more sawtoothed form as illustratedleast-squares fit of a Fourier sine series was made to the0 a 90". Figure 5 shows the results for the higher-order termsshowed that thevery low a's; atin Figure 4. AC2 (,y) data forin the series,4T, C2sin 4Ky7(9)
Data obtained at other subsonic velocities show these same characteristics. With thesenew higher-order terms, Equation (8) becomesIAJ/QSd C2 (a)5 Z C46However, Equation (10)phenomena.(a) sin 4KY CK I(a)'d/2V(10)K-still cannot describe the roll break out and roll speed upThe dynamic (free roll) tests showed that when the basic finner model isreleased from rest and allowed to roll freely on a sting mounted, internal, airbearing, it exhibits unstable oscillations about a strong roll trim point at large a'swhen the rolling velocity is small, implying that the torque due to roll rate ispositive. It then "bredks out" and "speeds tip" to a steady-state rate 'S,sometime.in the direction of, and sometimes opposed to, the cant. At this point the rollingtorque as a function of *y must have a real root with negative slope, sinceoverspinning the missile results in negative damping. It was concluded that if thedamping torque is continuous with y, it must have roughly the cubic form shownin Figure 6.2.0 -12'Vv -1790FT/SEC'- 1.6 -01.2 -20o///-J,j 0.4 -/0-1JI/-oI-0.8 -)/I//---1.2 -//-1.6-2.0020IIIIIIII406080100120140160180ROLL ORIENTATION ANGLE - -t (DEG)Figure 4. Induced Rolling Moment vs Roll Orientation Angle for BasicFinner Model Measured in Incompressible Flow8/
1.6 -V - 117 FT/SEC601.220.8.,LLzIL W0i-20.40o00-0.4-0IUO0C12Ui20204060ANGLE OF ATTACK80100x(DEG)Figure 5. Induced Rolling Moment Coefficients vs Angle of Attack forBasic Finner in Incompressible Flow9
ROLL TORQUE (L)L (f)(TORQETEDS T(TORQUE TENDS TOINCREASEJ)DECREASEf)-(-)issssFigure 6. Hypothetical Damping Function That Can Account for RollBreak Out and Roll Speed UpFigure 7 shows ,s vs a for the basic finner missile with and without fin cant.When 6 : 0, the dual steady-state spin rates are nearly equal for the particular a.When 5 z 30 and in the region of unstable oscillations and break out, there existsa large region where break out is possible only in the positive direction of spin. Atslightly higher a's, where break out can occur in either direction, *ss is usuallyslightly higher in the positive direction of spin.These rolling characteristics can also be explained in terms of the presentnonlinear theory. When the missile is circulating (e.g., , does not oscillate) the rollrate approaches a quasi-steady state, and the contribution of the periodic torquemay then be neglected. If we then consider a simple superposition of a roll toiquedue to fin cant (L 65) on the cubic form of damping as shown in Figure 8, thedisplacement produces an increase in the positive ss and a decrease in the negativeMoreover, if the moment due to fin cant is sufficiently large compared to thedamping moment, only break out and speed up with positive spin are possible, sincethe negative spin is damped.*ss"Now if the damping is also analytic with spin, we may express it in the formof a Taylor series whose coefficients depend on odd powers of y. The Fourier seriesand Taylor series can be combined into a more general differential equation thatcontains mixed terms;iIx/(QSd) C2 (0 EmKC210mK(ai)y'sin (4KT 1/2 mir)(11)
16 -01,-----6V/12w/8w .,117 FT/SEC3*I8/REGIONREGION OF STABLE OSCILLATIONSAND LOCK IN.ANDI50I60OF UNSTABLE OSCILLATIONSBREAK OUTCi4w-4-I--12 --16I010I20I30I40I70I80I90ANGLE OF ATTACK -a (DEG)Figure 7. Steady State Spin vs Angle of Attack for the Basic FinnerWith and Without Fin CantROLL TORQUE L)L L6)(-hI55Figure 8. Superposition of Roll Moment Due to Fin Cant on CubicDamping Function4ll
This is the general form which, when 5 0, has the symmetry property (-Y,EXTRACTION OF NONLINEAR ROLL COEFFICIENTSValues for appropriate coerficients are required as a function of angle of attackin order to predict missile roll behavior. High order, nonlinear roll coefficientscannot be readily determined from direct experimental measurement. However, it wasfound that these coefficients could be determined by fitting Equation (1I) to actualobserved roll position data.Observed roll position versus time data were taken from free-rolling subsonicwind tunnel tests. 1 5,16 In these tests, the missile was free to roll on a low frictionair bearing. The rolling motion history was recorded at selected angles of attackusing a motion picture camera. Initial conditions (-y0 , j 0 ) were varied at each angleof attack to insure that all modes of the rolling motion were excited. Figures 9 and10 show two plots of observed data (roll angle (-y) versus frame number) recordedat 450 angle of attack for the basic finner configuration.Cohen and Clare 17 developed a '-global" nonlinear least-squares fitting procedurethat could extract roll momernt coefficients from observed roll position data. Amodified nonlinear least-squares procedure was required for several reasons. The rollbehavior is extremely nonlinear in nature. Consequently, a standard nonlinearleast-squares fitting technique would require fairly accurate initial estimates of thecoefficients in order to begin the fitting process. In general, little is known aboutthe values of the higher-order roll coefficients. Therefore, the fitting process is begunby truncating the equation of motion, thus initially, neglecting higher order terms.In addition, there are further complications due to wind tunnel transients andsystem noise. As a result, these unmodeled torques can cause the residuals betweenthe computed and observed data to become so large that the process will notconverge when the motion is fit continuously.The "global" nonlinear least-squares procedure allows the observed data to bedivided into segments. This procedure provides jumps in roll angle and roll ratebetween segments, so that the computed data may be restarted in roll regions wherethe residual would otherwise be too large to allow convergence (of the sum of thesquares of the residuals in -y). This "global" process fits the observed data in two12
360 -'I.-i300I'i:"w : : ::: : : . o. : :.*o O o.240S.180.120.:.:: ::::.iI60000029.40 588088.20147.00117.0176.4020580235.20264.60FRAME NUMBER - 101EXPERIMENTAL ROLL ANGULAR DATA(ALPHA - 45 DEG., RUN 39)Figure 9. Observed Roll Angular Data for Basic Finner Missile at450 Angle of Attack (Run 1). . .I300 -aSI : 12.;:. .I.1. . ; ' : . :::::: ".".179.0:: :.! i i ::::::.;!21.:. *. :. .-:::::::::'. .; ii S.i !. i' .I /180 .012. . . . .''" . - . ' . . ' -o*oO, Oo . : :; ,:. . " '. ". 322.20 FRAME NUMBER - 0EXPEF.IMENTAL ROLL ANGULAR DATA(ALPHA -O45DEG. RUN 40)Figure 10. Observed Roll Angular Data for Basic Finner Missile at450) Angle of Attack (Run 2)13
phases. First, each data segment is fit independently ("locally") using constantbest-estimate aerodynamic coefficients to determine initial conditions for thatsegment. Then all of the segments are fit "globally" for a new set of aerodynamicroll moment coefficients and new segment initial conditions.Cohen and Clare generalized Equation (11) and incorporated it into a computerprogram to extract roll coefficients. The rewritten equation of motion including massand/or aerodynamic asymmetry terms isI d (,"j 0(\2V) k O(Ccos 4k Sjk sin 4k7) C, cos - Cas sin y(12)whereCae and CaS are the asymmetry terms.The correspondence between the coefficients usedconventional nomenclature is shown in Table 1.in Equation (12)andmoreAll modes of motion at the same angle of attack are combined and segmentedto make up observed roll angular data to be input into the fitting program. Usuallyonly estimates of the basic coefficients are required to begin the fitting process.Once a fit is achieved with the basic coefficients, additional coefficients may beextracted as desired. After the desired set of coefficients are extracted, thesegmented lengths are increased to minimize the errors in the extracted coefficientvalues due to the jumps between segments. The process is usually repeated until aset of coefficients is obtained at each angle of attack. Figures 11 and 12 showtypical comparison plots of observed and computed roll angle versus time for thebasic finner. The computed data was calculated using the set of extracted rollcoefficients for that particular angle of attack and configuration. The small linesdrawn normal to the computed data indicate segment locations.Further details about the procedure are found in Reference 18. Specific detailsof the computer coding are found in Reference 19.The technique was first applied to roll position data obtained at subsonic speedfor the basic finner configuration at 45, 57, and 660 angle of attack. A set of 14roll moment coefficients was extracted at each of the three angles of attack.Comparison plots of observed and compute (based on extracted coefficients) rollposition data showed excellent agreement. These fits coupled with statistical and14
Table 1. Aerodynamic Roll Moment CoefficientsConsidered in FitsCoefficientocom entionalNomcncialuneCon'leIrnN'maC. 6ContFii Calt roil nlrnictcoefficient60C C,Description6Variation of fin cantMomueit coefficientWith roll angleC02602Sy)Ct6CORCIOlincar roll dampingMoment coefficientpYCr'ccpCCv pC,,Cr(4,y20Quadratic roll dainping? Momentcoefficient30Cubic roll damping InonentCoefficientC30CIIVariationC1 IC5 p81C12Cr (2yC13Ce24yCIKCM ySolInduced01C2 8,)SCk(12?y)of Ikicar rollDampini momxent coefficient%Uitlroll anglerolling momentCoefficients02S0 3CacC.kuJ coefficients arefunctions of Mesmissile's angle of attack.Roll asymmetry coefficients(Combinations ofAerodynamic and mnassAsymmetry constants)
-COMPRUN 39- GAMMA VERSUS TIMEALPHA - 45'X OBSERVEDIEVERY4TH PT PLOTTED)30300240 ISO1221TIME(SEC)Fiue11. Comparison of Computed and Observed Roll AngularData for Basic Finner Missile at 450 Angle of Attack (Run 1)RUN 40 - GAMMA VERSUS TIMEALPHA -45X OBSERVEDIEVEnY 4TIHPT PLOTTED)-COMPUTED24018003601215Is2)2427TIME (SEC)Figure 12. Comparison of Computed and Observed Roll AngularData for Basic Finner Missile at 45' Angle of Attack (Run 2)16
phase plane analysis verified the equation of motion and the extracted coefficients.Reference 18 documents the application of tie fitting procedure, the coefficientresults, and analysis for the basic finner configuration.The fitting procedure was later applied to subsonic roll angular data for awrap-around-fin (WAF) missile tonfiguration, shown in Figure 13, at angles of attackfrom 0 to 90 .2 0 This application extended the utility of Equation (12) to a,configuration with 90* rotational symmetry. Figures 14 through 17 show plots ofthe four basic roll coefficients (C. 6, C , C2 3, and CQ 4 ) versus angle of attackfor the WAF configuration. The corresponding coefficients for the basic firner (astraight finned missile) are also presevited for comparison purposes in Figures 14through 17. The variations of the basic coefficients may be used to explain the rollcharacteristics of the WAF configuration.8.49-R0.67A1.00 DI A -9.94 "II7i0q--.1722.50.46-R 0.50R -\SECTION A-A41.00NOTE: ALL DIMENSIONS IN
the failue of the missile to pick up its fiul steady state rolling velocity and, then, by a catastrophic growth of the pitchhig and yawing motion. Initially the rolling velocity increases due t