Transcription
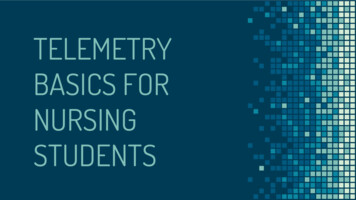
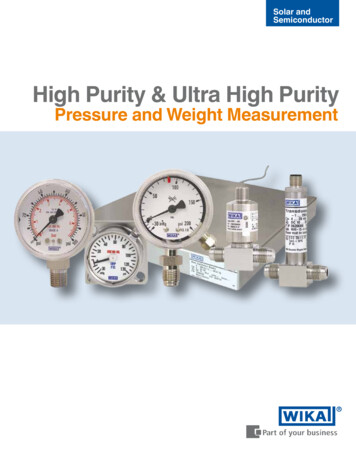
1From Radio Telemetry to Ultra-Low Power SensorNetworks – Tracking Bats in the WildFalko Dressler , Simon Ripperger§ , Martin Hierold† , Thorsten Nowak† , Christopher Eibel‡ ,Björn Cassens¶ , Frieder Mayer§ , Klaus Meyer-Wegener‡ , Alexander Kölpin† Dept. of Computer Science, University of Paderborn, Germany† Dept. of Electrical, Electronic, and Information Engineering, Universität Erlangen-Nürnberg, Germany‡ Dept. of Computer Science, Universität Erlangen-Nürnberg, Germany§ Museum für Naturkunde, Leibniz Institute for Evolution and Biodiversity Science, Germany¶ Dept. of Computer Science, TU Braunschweig, GermanyAbstract—Sensor networks have successfully been used forwildlife monitoring and tracking of different species. When itcomes to small animals such as smaller birds, mammals, or eveninsects, the current approach is to use extremely lightweight RFtags to be located using radio telemetry. A new quantum leap intechnology is needed to overcome these limitations and to enablenew ways for observations of larger numbers of small animals. Inan interdisciplinary team, we are working on the different aspectsof such a new technology. In particular, we report on our findingson a sensor network based tracking solution for bats. Our systemis based on integrated localization and wireless communicationprotocols for ultra-low power systems. This requires codingtechniques for improved reliability as well as ranging solutionsfor tracking hunting bats. We address the technological andmethodical problems related to system design, software support,and protocol design. First field experiments have been conductedthat showcase the capabilities of our system.I. I NTRODUCTIONWildlife tracking has been one of the early applications inWireless Sensor Networks (WSNs) and remained, among afew others, one of the most successful ones [1], [2]. Sensornetworking-based wildlife monitoring provides more sophisticated methods for biologists to study individuals of a specificspecies, in terms of gathering a huge amount of data by longterm observations. When it comes to tracking smaller animalslike very small mammals or birds, radio telemetry is stillconsidered state of the art [3]. This means that for localizinga single individual, at least two radio receivers operated bybiologists in the field are needed to obtain a single positionsample per triangulation. Here, both the rate of localizationsamples is very low – too low for continuous tracking, andthe observation is usually restricted to very few individuals.In the scope of the BATS1 project, we are developing a newsensor network based system for monitoring group dynamicsof bats in their natural habitat. In particular, we go one step further compared to related activities and investigate potentials ofultra-low power sensor systems carried by the bats to monitorcontacts or encounters between individuals and to track theirroutes at high spatial and temporal resolution. Tracking batsis especially challenging because direct observations on flying1 Dynamically adaptive applications for bat localization using embeddedcommunicating sensor systems, http://www.for-bats.org/13 met 5 at time 1426.971352Figure 1. Conceptual scenario for bat tracking in the wild: stationary groundnodes are used to localize and to track bats based on emitted beacon messages.The mobile nodes are also used to monitor encounters and to download thisdata to the ground network to increase the observation range beyond theground station area.bats are almost impossible due to their nocturnal activity andhigh mobility. Mouse-eared bats (Myotis myotis), one of themost protected species in the European Union, are the mainstudy target. The key challenge is that the animals with anaverage body weight of about 20 g can carry sensors of at most2 g (including a 1 g battery), which is even less weight thana sheet of paper in A5 format. Comparable sensors publishedin the literature typically weigh more than 100 g, with theEncounternet tags being outstanding with a weight of only10 g – which is one order of magnitude higher compared to ourrequirements [2]. This poses a series of fundamental researchquestions that need to be addressed from a multi-disciplinaryperspective ranging from hardware design, system support, andcommunication protocol engineering.Our bat tracking scenario involves a variety of functions thatneed to be integrated with a main focus on energy efficiency.In a first stage, we aim at tracking flying bats using a stationaryground network. The concept is outlined in Figure 1. Theground stations localize and track the bats using a combinationof Received Signal Strength (RSS) and phase-based localization techniques. Given the energy constraints of the mobilenodes, special modulation schemes are needed. When talkingabout the mobile nodes, we need to emphasize that a 1 gbattery cannot directly power the microcontroller and the radiotransceiver for a longer time period – in particular, we haveto charge a capacitor first to provide peak operating currentfor the system. We investigated a combination of Wake-Up
Receiver (WuRx) and carefully controlled duty cycling torecharge the capacitor.In a second stage, the system is also used to exchange contact information among the mobile nodes to increase the observation range beyond the ground-station area. The encounterinformation is then downloaded to the ground network whenin communication range – as determined by the WuRx. In thefollowing, we will refer to this data as chunks representingsets of contact information collected by a mobile node onthe bat. The download follows the same power constraintsand needs to be integrated with the localization signal. Asthe channel quality varies quickly in the given environment,additional error control mechanisms need to be integrated. Weexplored the capabilities of Erasure Codes (ECs) and wereable to show that substantial improvements are possible.Right now, the project goes beyond initial fundamentalresearch on all the different aspects mentioned: First fieldexperiments have been completed in Germany as well asPanama showcasing the capabilities of the envisioned architecture. In this article, we summarize all the related inherentlyinter-disciplinary research challenges and outline conceptualapproaches solving the problems – towards a novel ultra-lowpower sensor networking solution for tracking bats in the wild.Our main contributions can be summarized as follows: We report on first field tests using our 2 g sensor platformenabling, for the first time, tracking of animals weighingas few as 20 g. We developed a novel system architecture supportingprecise localization and tracking. We summarize system design aspects from the operatingsystem to wake-up receiver design. We finally outline the novel integrated wireless communication and localization protocols from PHY to forwarderror control using erasure codes. We briefly report about first successful outdoor experiments in Germany and Panama.II. R ELATED W ORK : S TUDYING BATS IN THE W ILDFirst projects relied on typical sensor platforms as used inacademic research labs, e.g., the Great Duck Island project, oron special hardware that is even robust enough to be carriedby larger animals, e.g., the ZebraNet project. More recently,tracking has become a major application besides the collectionof several sensor readings. Also, the technological advancesenabled new generations of sensor nodes that can be usedto track much smaller animals such as the Iberian lynx [1].Wireless digital transceiver technology rendered even theautomated mapping of social networks in wild birds possible,e.g., in the Encounternet project [2]. From these successfulapproaches to wildlife monitoring using sensor networks, welearned about hardware design issues, network management,and data collection techniques.State of the art technology for bat tracking is still radiotelemetry. However, this method requires high labor costs sincetwo or more persons must manually observe one or a fewindividuals at a time. The reward for this high effort is aminimal number of animal positions that are separated byseveral minutes and usually contain localization errors of tensof meters.Observing the movements of individual animals in theirnatural habitat is one of the most difficult tasks in the fieldof behavioral biology; however, it is the key to understandcomplex biological processes such as foraging, social interactions, migration, and gene flow. Recent technological advancesin satellite based animal localization and automatized dataacquisition are restricted to medium sized to large mammalsand birds due to the considerable weight of available transmitters [4]. The most promising approach for tracking large-scalemovements of small animals from space is represented by theICARUS initiative. It is expected to start in 2016 and tagswill initially weigh 5 g but should become considerably lighterwithin a couple of years [5]. Until ICARUS will finally launchand tags underwent further miniaturization, traditional radiotelemetry still represents the state of the art of bat tracking asradio transmitters are available with a weight down to 0.2 g.However, this technique can only provide a rough estimateof foraging movements based on animal positions that areseparated by several minutes and that contain localizationerrors of at least tens of meters. However, the identity of theindividuals remains unknown when such experiments are usedto study bats in the wild and the observable area is limited.The study of social interactions among individually identifiable bats is especially challenging in the wild. To date, theonly option to automate this is to use extremely light passiveintegrated transponder tags (PIT-tags), which can be identifiedwithin known roosting sites that are equipped with PIT-tagreaders [6]. The only possibility to document group dynamicswhile foraging is again radio telemetry [7].The BATS sensor network aims at implementing bothautomated high-precision positioning of many individuals at atime and documenting interactions of the observed bats. Thehigh temporal and spatial resolution of data will render thereconstruction of individual flight trajectories possible. Communication among mobile nodes will shed light on interactionsamong individual bats at the individual level during the nightlyactivity phase, which were impossible to study until now. Theadvances of the BATS system holds the potential to gain adeeper understanding of bat behavior, e.g., habitat use, analysisof flight maneuvers, and group dynamics.III. T HE BATS G ROUND N ETWORKA. Experiment ManagementMany projects on wildlife tracking mentioned in the introduction have used a Data-Stream Management System(DSMS) to collect the data. This has the advantage of processing the data early, i.e., selecting and aggregating them,which has proven to reduce power requirements for WSNs.This in general is favorable, as battery lifespans increaseand maintenance costs are reduced. Queries are deployed tothe ground network and later even to the mobile nodes onthe bats to define the early processing. The stream operatorsinvoked by the queries can be adjusted or even replaced incase the biologists want to tweak resolution to support theirexperiments. It is still a research issue to conduct dynamicstream operator replacement efficiently in sensor networks.
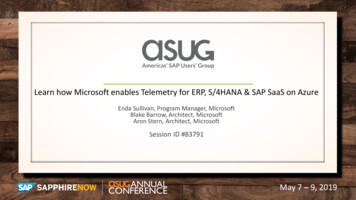
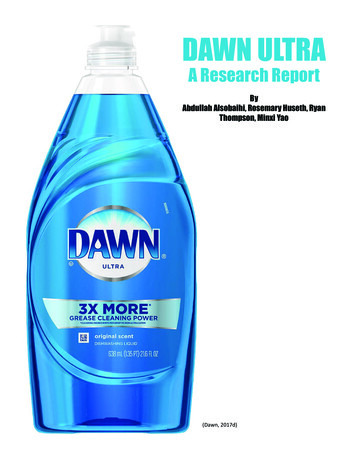
Due to technical restrictions, especially the communicationdata rate between mobile nodes and ground nodes, not allacquired data can be sent. For example, providing a time stampand duration of a meeting, which is mandatory for furtheranalysis, uses almost 70 % of the available data rate. Otherdata like different Received Signal Strength Indicator (RSSI)values cannot be sent without any violation against data raterequirements. Therefore, only a subset of acquired data can besent to the base station network. Thus, a decision has to bemade to select the most suitable data to be sent. Dependingon the current research focus, the system will be adapted toincrease the quality of the relevant data while balancing theother goals: Providing additional data for later offline analysisand increasing node lifespans.B. Ground NodesThe ground nodes consist of MicroZed boards2 equippedwith a custom Software Defined Radio (SDR) RF frontendbased on the Analog Devices AD9361 transceiver chip aswe assume no tight energy constraints for the ground nodes.This versatile SDR platform allows to exploit the localizationmethods described above. Comprising an FPGA and a dualARM core, the ground nodes feature enough processing powerto enable complex range estimation and direction findingalgorithms.The ground nodes also have to wake up the mobile nodesin order to initiate and to coordinate the transmissions whenthe mobile nodes that are in range of the network. Periodicbeacon signals allow to loosely synchronize the mobile nodesto the ground stations. Using this beacon signals, mobile nodescan decide whether to transmit localization signals or to saveenergy.C. Ground NetworkIn order to support both localization as well as data collection from the mobile nodes, an efficient and decentralizeddistributed data storage and lookup is needed. A promisingconcept is a Distributed Hash Table (DHT) integrated withground network routing capabilities. There exist various protocols for sensor networks providing standard DHT functionalities [8], however, most of them rely on globally valid topologyinformation, need geographic location information, or do nottake into consideration the physical position of nodes, whichleads to increased routing paths. We selected the Virtual CordProtocol (VCP) [8], which overcomes many of these shortcomings. VCP supports routing in the ground network topologyusing a virtual cord based on neighborhood information. Fordata management, each node is then responsible for data witha hash value that matches its virtual node identifier.IV. M OBILE N ODE D ESIGNA. Hardware DesignThe building blocks of the mobile node and a successfullyused prototype are depicted in Figure 2. Due to its high energy2 erometerWuRXµCFigure 2. Hardware architecture and assembly of the mobile node.density, a lithium primary coin cell battery is used to powerthe tag. Caused by the maximum current of lithium cell supplycapability, a buffer capacitance is applied. A DC/DC switchingconverter down converts the variable capacitor voltage to aconstant system-on-chip input voltage of 1.8 V. The system onchip (SoC), which is the key component of the tag, comprisesa microcontroller, a dual-band frontend for transmission andreception in the 868 MHz and the 2.45 GHz band, and a WuRxoperating in the 868 MHz band. First prototypes containing aCortex-M0 , an Si4460, and an AT86RF233 are built to set upa system demonstrator. Besides the SoC an accelerometer isplaced on the tag to facilitate a motion detection. A dual-bandantenna is shared by the regular transceiver and the WuRx.The whole hardware assembly is protected against physicalinfluences (e.g., humidity or the attempt of the bat to scratchit off) by an epoxy sealing.The WuRx must be suitable for two different operatingconditions: the communication between mobile nodes andthe communication between ground node and mobile node.Defined by the spacing of ground nodes the maximum distancefor ground node to mobile node communication is approximately 50 m. According to the communication channel thiscorresponds to an attenuation of 65 dB (free space path loss)to 78 dB (free space plus linear fading with 0.25 dB/m) at868 MHz. Given a transmission power of 10 dBm, this leadsto a minimum required sensitivity of 55 dBm and 68 dBm,respectively. We rely on the concept described in [9], whichis suitable for both operating conditions.B. Power ManagementThe lithium primary battery offers a high capacitance, butstill the current that can be drawn is limited to 0.5 mA.However, the SoC, especially the transceiver, demands severalmA when active. To satisfy this demand a buffer capacitanceis integrated, that has to be charged by the battery before it isbeing discharged by the SoC. Hence, a continuous operationof the transceiver is not feasible. Furthermore a trade offbetween active period and recharging time exists: the longerthe transceiver is active the longer the capacitor has to berecharged. With the assumption that the current drain duringthe sleeping phase of the tag and the recharging duringthe active period is negligible the dependency between themaximum active period tact and the minimum recharging time
24681012Vtcharge[s]0.71.214tact[ms]Figure 3. Dependency of the active period and the recharging time.tch is visualized in Figure 3. The fact that the capacitor’svoltage decreases during its discharge leads to the existence ofan absolute maximum time limit of the active period. Namelywhen the voltage of the capacitor at the end of the activeperiod UL falls below the 1.8 V input voltage of the SoC. Thevalue of UL is also given in Figure 3 and determines the limitof the active period to be about 10 ms. The resulting protocoldesign challenges are discussed in Section V.C. System SupportHardware limitations inevitably have an effect on the resources that are available to the software components runningon top. In the BATS project, this limitation is even moredifficult to manage as we have to assume a deeply embeddedsystem with a microcontroller and available memory thatare considerably more limited than, for example, commonembedded devices such as smart phones or lab-style sensornodes. This demands for a common software infrastructureto efficiently use underlying hardware components and renderresource efficient applications possible. Yet, these applicationsstill need to meet certain other criteria apart from pure energyefficiency, for example, complying to certain deadlines suchas soft and hard real time. For tiny embedded systems,a multitude of different operating systems exist, each mayhaving divergent approaches since they are geared towardsdifferent use cases. Yet, most of these operating systems stillaim to be general purpose, which results in a certain degree ofpotential efficiency losses. Alternatives are real-time operatingsystems such as S LOTH [10]. This particular system allowsmaking full use of the available hardware support, which leadsto smaller program code and space that the operating systemallocates in memory.To address the requirement of having an operating systemand applications that also need to be optimized regardingenergy efficiency, we rely on both the SEEP energy estimationframework developed by Hönig et al. [11] and energy measurements from our self-developed measurement device. Furthermore, this gives us the possibility to write predictable codein terms of its expected lifetime on the actual hardware. Byfollowing the framework’s profile-driven approach, we havecreated an energy profile for our target platform, and therefore,are able to retrieve estimated, expected energy consumptionvalues for a S LOTH application under test (e.g., with CPUintensive code such as erasure encoding processing, describedin Section V-C). This enables us to pro-actively developprogram code and make energy optimizations before the actualsystem is deployed and field tests are being conducted.We further extended S LOTH with support of dynamic program code reconfiguration; that is, the possibility to efficientlyswitch between different code parts that already reside on theplatform at run time. With this mechanism, we can eitherreact to a query that was sent by the front-end user (i.e., abiologist) or to predictions automatically derived from ongoingdata stream analyses. By way of example, we are able to alterthe bit fields of the meeting, which consists of a meeting’sduration, starting time, and RSSI values.V. C OMMUNICATION P ROTOCOLSA. Protocol DesignWhen it comes to the design of low energy communicationprotocols in sensor networks, three main approaches havebeen identified in the literature: (a) duty cycling, i.e., periodically switching between active and passive state to poweroff main components in the passive stage – synchronizationis explicitly required; (b) low power listening, i.e., “wakingup” the receiver node using multiple transmission attempts(either full messages or wake-up preambles) to dismiss thesynchronization requirement; and (c) wake-up MAC protocols,i.e., using dedicated hardware to wake-up the node in case ofan upcoming transmission (e.g., PW-MAC [12]).Given the discussed energy constraints, the communicationprotocol for mobile to ground communication needs to bedesigned in a completely novel way. First of all, duty cycling isan inherent feature given the recharging cycles of the capacitorthat powers the radio transceiver. Furthermore, unnecessarytransmissions need to be prevented when the bat is not incommunication range to at least one ground node. Here, amulti-stage WuRx is used to completely power-off both theradio transceiver and the microcontroller.These two concepts can be combined to benefit from bothadvantages. Duty-cycling helps reducing the energy consumption (and supports recharging the capacitor) when the bat is inrange of a ground node and the multi-stage WuRx triggersthe initiation of this duty cycling and turns off all digitalcomponents if not needed. The entire cycle is controlled bythe ground network, i.e., all ground nodes are assumed to besynchronized. We assume a frequency of wake-up pulses ofup to 10 Hz for trajectory estimation.In each cycle, a wake-up pulse disseminated by the groundnodes wakes up the mobile nodes. In a second phase ofthe project, we aim to even encode data on the wake-upsignal. This information can be used to coordinate channelaccess in order to avoid collisions if multiple bats are withinthe range of a ground node. Obviously, more than a singlemobile node needs to be supported by the mobile to groundcommunication protocol and to track multiple individuals atthe same time. Timing is controlled by the base station.We picked this approach to increase the robustness of theprotocol even though (without an uplink signal) this limits thenumber of mobile nodes to the number of available time slots.Furthermore, guard intervals have been introduced becausethe sensor nodes are not synchronized perfectly and since theoscillators might drift considerably.
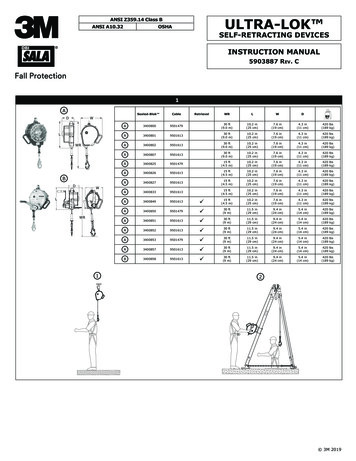
2.50.202.00.150.10 21010 1010Bit error probabilty [%]101Figure 4. Impact of data transmissions on the maximum achievable rangeestimation performance.B. Encoding and Modulation for Combined Localization andData CommunicationAs energy awareness is one of the most crucial aspect forour system, the energy spent on RF activity for localizationand communication has to be minimized. We recently proposed a signaling scheme that combines localization and datasignals [13]. In the presented approach Binary Offset Carrier(BOC) modulation is used to simultaneously transmit dataand provide accurate range measurements. BOC modulation iswell-known in the field of Global Navigation Satellite Systems(GNSSs). In contrast to GNSS and due to the limited energy,very short burst signals are used for communication andlocalization instead of continuous signals. A further motivationfor burst signals is to avoid near-far effects in local Real-TimeLocating Systems (RTLSs) by time division multiplexing.Due to limited observation area pure subcarrier tracking isapplied in the BATS system as this approach maximizes RootMean Square (RMS) bandwidth and thus leads to a minimumrange estimation variance. Data transmission is realized bymodulation of the subcarriers. This modulation broadens thesubcarriers and also decreases the RMS bandwidth, but stillhas only a negligible impact on the range estimation accuracy.Yet, data decoding errors have a rather substantial influenceon the distance estimation as they result in a mismatch ofthe correlated sequences, which then lead to a Signal-to-NoiseRatio (SNR) degradation. This significant increase in the rangeestimation variance is shown in Figure 4.C. Improving Communication ReliabilityThe channel quality may vary quickly due to the continuousmovements of bats and the heterogeneous forest environment,thus, the communication is in general assumed to be highlyunreliable and error control techniques have to be applied. Weconsider ECs as a specific class of forward error correctioncodes as a promising approach in our BATS scenario. ECsare widely employed to improve the reliability in wirelesstransmissions [14]. Compared to the simplistic approach tosend chunk replica together with the original data as well asto the classic Automatic Repeat Request (ARQ) mechanism,ECs offer a better performance with reduced costs in terms ofenergy consumption. Likewise, ECs show a better efficiencythan on demand chunk retransmissions realized by acknowledging successfully transmitted chunks.ARQReliabilityEnergy Efficiency0.25Overhead (%)0.30CRLB no datafdata 10 kbitsfdata 50 kbitsfdata 200 kbitsfdata 500 kbits1.50.351 replica ChauchyTornador 48r 47r 46r 45no error control1.0Range estimation error [m]0.400.50.60.70.80.91.0Chunks successfully decoded (%)Figure 5. Reliability gain achieved by of the different error control strategiesand code rates r versus their energy efficiency in terms of the necessarynumber of packet transmissions.The significant difference between the various ECs is themathematical background of the encoding and decoding algorithms. Reed Solomon (RS) codes such as Cauchy andVandermonde share the same algorithms, however, they workon different kinds of matrices, whereas codes like Tornadovary significantly in the algorithm itself. We investigated thementioned codes for their applicability in our scenario [15].These codes support different code rates that essentially definethe possible error correction vs. the overhead for additionalcoding data. To the best of our knowledge, there exists nostudy on the feasibility of ECs for scenarios with spontaneousconnectivity such as the scenario we are investigating with itsspecific channel properties.The usage of ECs and replicated sending inevitably increases energy consumption. Primarily the sending of redundant chunks drains energy, however, in the former case theexecution of the encoding algorithm has to be taken intoconsideration as well. This trade-off between the improvedreliability and the overhead caused by redundant chunks isoutlined in Figure 5. The graph illustrates the gain in reliabilityfor the different error control techniques in comparison to theenergy efficiency. The plotted results have been collected in aseries of simulations based on the discussed mobile to groundcommunication protocol and assuming a typical packet errorrate of about 20 % in addition to the used two-ray path lossmodel to resemble multipath fading effects in the simulation.As we move from left to right in the graphs, reliabilitymeasured against the amount of recovered data increases,whereas moving from bottom to top the energy efficiencydecreases with an increasing overhead. For reference, also thenon-replicated sending is indicated, obviously not inducingany overhead but at the cost of very low reliability.As we can see, ARQ as well as Tornado-based ECs eithersignificantly increase the overhead or lead to only marginalreliability improvements. However, combining the wirelesscommunication with a chunk-based RS code, we observesubstantial improvements at acceptable energy costs. Thisespecially holds for code rates of r 47 to r 48 .VI. F IRST E XPERIMENTS ON WILD BATSThe basic functionality of the BATS concept has been validated on the target species Myotis myotis, the greater mouseeared bat, and on the tropical fringe-lipped bat, Trachops
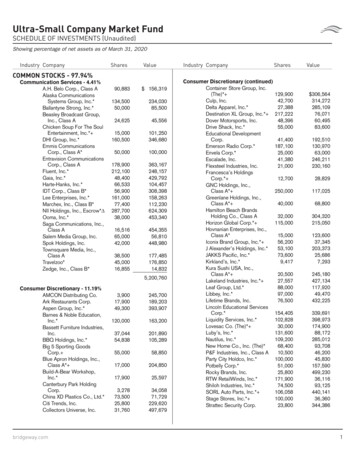
ACKNOWLEDGEMENTSFigure 6. Individuals of the focus species Myotis myotis (left) and Trachopscirrhosus (right) carrying prototypes of mobile nodes that are attachedbetween the shoulder blades with surgical cement.cirrhosus, in Panama. In order to demonstrate the technicalfeasibility to build an energy efficient proximity sensor node ofless than 2 g with a theoretical battery life of at least one week,we performed a field test on four bat individuals in a maternitycolony of mouse-eared bats in Upper Franconia. Presence andabsence of the tagged individuals in the colony has beendocumented and interactions among the tagged individualshave been surveyed. Communication of mobile nodes with thebase station served as an indicator of presence in the colony,while RSSI measurements were used to estimate the distancebetween two bats. During a second field experiment conductedin Gamboa, Panama, we successfully documented encountersamong members of a social group of the fringe-lipped batoutside the roost while hunting. Furthermore, we trackedforaging movements of individual bats on a small area of about20 m by 25 m based on field strength measurements. Taggedanimals of the focus species Myotis myotis and Trachopscirrhosus are shown in Figure 6.VII. C ONCLUSION AND F UTURE W ORKWe reported on our findings towards a new era of ultralow power sensor systems used for tracking bats in the wild.Even though the BATS sensor network has been designedto observe bats, i.e., small animals that are moving in threedimensions at high speed, it will also be applicable to a widerange of vertebrates including mammals, birds and reptiles,and even certain invertebrates as, e.g., large beetles. In firstfield tests, we succeeded collecting contact information of batsin their natural environment and documented foraging movements. These very promising early results encourage furtherinvestigations and research in this inherently interdisciplinaryproject. Many of the scientific findings can be adapted to otherapplication fields – we believe that our technical solutionswill substantially impact research
A new quantum leap in . ther compared to related activities and investigate potentials of . to charge a capacitor first to provide peak operating current for the system. We investigated a combination of Wake-Up.