Transcription
Pennsylvania ROV Engineers Allentown, PA Team port Natalie SampsellChief Executive Officer, Grade 11 Ben GreenLead Programmer, Grade 12 Timothy GahmanDesign Engineer, Grade 11 Hannah SmithGraphic Designer, Photographer, Grade 12 Noah JarrattProps Designer, Fundraising, Grade 11 John SampsellProps Designer, Safety Officer, Grade 8MentorsCoaches Dave Sampsell David Sampsell Robin Sampsell Stephen Gahman David Green
MATE Technical Report 2015Table of ContentsAbstract . 2The Team . 3Project Costing . 4Safety . 5Design Rationale: ROV Components . 5Frame. 5Electrical. 5Ballast . 6Video Systems . 6Pressure Housing. 7Tether . 7Propulsion . 7Programming. 8Flow Chart. 9Payload Description: Mission Tasks .10Science Under the Ice . 10Subsea Pipeline Inspection & Repair. 10Offshore Oilfield Production & Maintenance . 11Challenges.12Lessons Learned .13Pennsylvania ROV EngineersAbstractA company currently in its fourth year ofoperation, Pennsylvania ROV Engineers, orpROVe, was originally incorporated to build aremotely operated vehicle capable of inspectingshipwrecks for environmental hazards. Thisyear, the team focused on designing a vehiclecapable of performing a variety of tasksassociated with the polar science community andthe offshore oil and gas industry, including butnot limited to data collection, instrumentdeploying, replacing pipeline, and preparing awellhead. Our ROV (Remotely Operated Vehicle),Poseidon Mk 3.14, incorporates a custom, fullyproportional lateral and vertical control systemthat allows for bidirectional control of everypropeller on the ROV. This thrusterarrangement, coupled with custom Pythonprogramming, a Raspberry Pi, and Graphic UserInterface, provides a seamless connectionbetween the pilot and the vehicle. Other specialfeatures include a modular design, grab pointsfor easy transportation, and a rotary tool mountto provide easy access to a variety of custommade payload tools. The end result is a powerful,highly maneuverable, and fast ROV fullyprepared to take on this year’s mission tasks.Future Improvements .13Reflections .13References .15Acknowledgements .15Appendices .161: Expense Summary . 162: Safety Checklist. 173: SID . 18Team Alumnus Using Prototype toROV Under the Icewww.proveteam.comPage 2
MATE Technical Report 2015Pennsylvania ROV EngineersThe TeamOur homeschool-educated team includes the following members for our fourth year of competition:Natalie Sampsell is a 17-year-old high school junior. Although she has been on the team since thebeginning, she only started leading the team this year. She enjoys acting, reading, listening to music,playing piano, skiing, and playing sports. Her future plans include pursuing a STEM career in college, witha possible major in Computer Science.Benjamin Green is an 18-year-old high school senior. He has been homeschooled since Kindergarten,and some of his favorite hobbies include Ultimate Frisbee, board games, airsoft, acting, and Netflix. Sincehe first took a Computer Programming class a few years ago, he has been fascinated by Computer Science,which is his intended major.Timothy Gahman is a 16-year-old high school junior. He enjoys golf, hunting, gaming, karate, andsnowboarding in his spare time. In the future, he wants to pursue a career in engineering, possiblybiomedical engineering.Hannah Smith is a 17-year-old high school senior. In her spare time, she enjoys playing sports, hangingout with friends, watching movies, playing piano and guitar, and taking pictures. In the fall of 2015,Hannah plans to attend Liberty University to pursue a degree in nursing.Noah Jarratt is a 17-year-old high school junior. This is his first year with pROVe. Some of his hobbiesinclude snowboarding, running, gaming, playing piano, and relaxing with friends. He hopes to go tocollege and graduate with a major in business and a minor in communications.John Sampsell is a 14-year-old eighth grader. Although he has been around since the beginning ofpROVe, this is his first year officially on the team. In his spare time, he enjoys gaming, playing football,watching sports, listening to music, and reading.Noah Building Propswww.proveteam.comHannah Helping Test the CameraPage 3
MATE Technical Report 2015Pennsylvania ROV EngineersBudgetThe initial budget was 680 for total project spending, with actual expenses being just a bit under thisprojection. We were able to use our entire ROV from last year, so our only expenses were for tools, props,electronics, and administrative costs. Reusing last year’s ROV saved us a lot of money, and we were alsoable to save on tools and other components by designing them ourselves and making them from basicbuilding materials. Since everyone actively contributed to the project, there were many opportunities foringenuity, which led to greater efficiency with our available funds. After taking into account free CADsoftware from Solidworks and donations from Home Depot, the total cost for this project was 452.50.The estimated cost of attending the International Competition is 7,700.00 for airfare, lodging, andmiscellaneous travel expenses. All the funds for these expenses were privately donated by the familiesinvolved in this project, and any fundraising done by the team was for the purpose of paying back thesefamilies. Fundraising efforts commenced after the Regional Competition, and these have raised 250.00thus far. Following is the expense and budget summary. Refer to Appendix 1 for expense details.EXPENSE AND BUDGET SUMMARY - 2015CategoryPurchasedDonatedFrameRe-usedBudget 125.00 120.00 375.00 120.00Electronics & Cameras 100.22 90.00Tools 82.44 25.00 150.00Props 59.84 25.00 50.00 242.50 140.00ROV SubtotalAdministrative(entrance fee, t-shirts,domain name, poster)Project Totalwww.proveteam.com 210.00 452.50 140.00 500.00 320.00 17.00 360.00 517.00 680.00Page 4
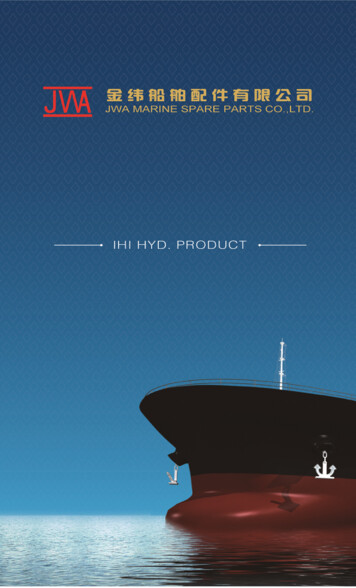
MATE Technical Report 2015SafetyOur team has always been concerned aboutsafety above all else. Basic safety practices wereregularly followed during all stages of ROVfabrication and use. This included wearing safetyglasses and closed-toes shoes when working onthe ROV, using power tools properly, and takingprecautions when using tools or doing anytesting. Also, to ensure our team’s safety, as wellas the safety of bystanders, we go through all thecrucial steps on our safety checklist beforeoperating the ROV. For the physicalcharacteristics of our ROV, we incorporated amain power switch that will immediately turn offthe ROV. Outside of the electrical box, there is asmall 25-amp fuse in case of a short circuit. Ifthere is no fuse, the circuit will break at theweakest point, possibly being exposed to water.The fuse acts as this weakest point, and can beeasily replaced. We attached black-and-orangecolored kort nozzles to the horizontal propellers,and we designed the ROV’s frame to surroundthe vertical propellers. This design protects bodyparts, wires, or anything in the water fromgetting caught in the spinning blades. The vehiclewas designed with grab handles on both sidesand the back to help maneuver the vehicle in andout of the water efficiently and safely. Our wholeROV was designed to maximize safe operatingfeatures. A copy of our team’s safety checklisthas been included as Appendix 2.Pennsylvania ROV Engineersbars’ into the flat panel design, we could remedythese problems. The bars, made out of PVC thatwe bent by using heat, allow the ROV to beplaced upside down for maintenance, and alsoprovide an easy and safe place from which to liftthe vehicle.Another major feature of our ROV’s frame is theRotating Tool Mount, or RTM. The RTM basicallyconsists of a ‘carriage’ or ‘cage’ that is controlledby a gear motor and rotates horizontally a full360 degrees beneath the ROV. It has four sides,which allows us to mount four different tools.This way, the RTM can be rotated 90 degrees toswitch which tool is beneath the camera at thefront of the ROV, effectively allowing us to havefour tools in only one spot on the ROV. We havefound this device to be a major timesaver, as itallows us to design each tool as if it is the onlytool on the vehicle. The RTM is attached to theframe by a central shaft that runs the full heightof the ROV and uses two acetal glass ballbearings. This allows it to support the weight ofthe ROV if need be.Design Rationale: ROV ComponentsFrameA couple years ago, we decided to try somethinga little different and mount all of our ROV’scomponents on a flat panel, a professionalcutting board. We really liked this design,because it was strong, reasonably light, andallowed access to all of the important pieces ofthe ROV design for upgrades and maintenance.The only things it lacked were good handholdsand a superstructure that protected the ROV incase something was placed on top of it or it fellover. We decided that by incorporating ‘rollwww.proveteam.comCAD of ROV FrameElectricalTeam pROVe has always focused on two mainitems with its approach to ROV electronic design:a microcontroller on board the ROV, andproportional control.The microcontrollerallows for a very thin tether - advantageous formaneuverability - and proportional controlPage 5
MATE Technical Report 2015allows for a much greater dexterity thanafforded by a simple on/off control scheme. Inlight of these goals, the team decided after muchdiscussion that the best setup would be to run anEthernet connection through the tether,connecting a laptop on the surface to aRaspberry Pi on board the ROV. The RaspberryPi would query the laptop for the most recentspeed and direction values for each thruster, andforward that data on to an Arduino Mega via I2C.We chose this setup because the Ethernetconnection between the Raspberry Pi and thelaptop topside provided a reliable method forlong distance data transmission, while the I2Cbus between the Raspberry Pi and the ArduinoMega gave the Raspberry Pi the means tocommunicate its wishes to the hardware on ourROV. Additionally, the I2C bus allows for easyfuture expansion of the ROV electronics, sincemultiple devices can be attached to it.Arduino/Raspberry Pi Pressure HousingBecause we wanted proportional control of theROV, we knew we would need some sort ofmotor controllers.When we researchedcommercial options, we found that it would bequite expensive to purchase as many motorcontrollers as Poseidon would require. Becauseof this, and also because we always like to makethings ourselves whenever possible, team pROVedecided to build its own custom motorcontrollers. We wanted each controller to beeasily replaceable in case of upgrades or afailure, so we decided to build each controller onwww.proveteam.comPennsylvania ROV Engineersits own board, with a microcontroller managingthe control electronics which operated the largepower MOSFETS which did the actual switchingof the current. Though it took a lot more timeand effort than expected, the end result was ahighly versatile motor controller design that wascost effective and capable of controlling up tofour 1000gph bilge pump motors in parallel ifthe need arose. A System InterconnectionDiagram (SID) that details the electrical wiringinformation has been included in Appendix 3.BallastThe tools attached to our RTM have someweight, and we have added a little more weightto the bottom of the ROV. This provides asignificant amount of ballast. For flotation, wehave pressure housings and some extra foam tocounteract the ballast. The pressure housingdesign provides natural buoyancy, and the foamadds extra flotation. The reason for the addedballast and flotation is for stability. When theballast and flotation are separated, the ROVtends to balance itself in an upright position.Video SystemsOne of our goals this year was to have an HDcamera for the main ROV video system.Unfortunately, we were not able to achieve thisgoal. Our plan was to use the Raspberry Pi tostream HD video over our network connection toa computer topside. While this would certainlybe possible, we soon realized that we couldbetter spend our time elsewhere, as getting asystem that worked and had low enough latencyto be used for navigation would take more timeand know-how than we had available to us.Becaus
Hannah plans to attend Liberty University to pursue a degree in nursing. Noah Jarratt is a 17-year-old high school junior. This is his first year with pROVe. Some of his hobbies include snowboarding, running, gaming, playing piano, and relaxing with friends. He hopes to go to college and graduate with a major in business and a minor in communications. John Sampsell is a 14-year-old eighth .