Transcription
INGENIERÍA DE SISTEMAS Y AUTOMÁTICASISTEMAS DE CONTROLPRÁCTICAS DE SISTEMAS DE CONTROLANÁLISIS Y DISEÑO DE SISTEMAS DE CONTROL ENEL DOMINIO DE LA FRECUENCIAProfesor: Adrián Peidró (apeidro@umh.es)OBJETIVOS Afianzar los conocimientos sobre la respuesta en frecuencia de un sistema. Estudiar la relación entre los márgenes de fase/ganancia y el lugar de las raíces. Diseñar controladores en el dominio de la frecuencia.1. INTRODUCCIÓN. RESPUESTA EN FRECUENCIA. MÁRGENES DE FASE Y GANANCIAComo hemos visto en prácticas anteriores, cuando introducimos a un sistema lineal einvariante en el tiempo una entrada senoidal con una determinada amplitud 𝑋 y unafrecuencia 𝜔Entrada 𝑋 · sin 𝜔 · 𝑡entonces la salida del sistema en régimen permanente es otra señal senoidal a la mismafrecuencia, pero con amplitud y fase distintas a las de entrada:Salida 𝑔 · 𝑋 · sin 𝜔 · 𝑡 𝜑La amplitud de la señal de salida es 𝑔 veces la amplitud de la señal de entrada, mientrasque 𝜑 es el ángulo de desfase de la señal de salida con respecto a la de entrada. Laganancia 𝑔 y el desfase 𝜑 dependen de la frecuencia 𝜔 de la señal de entrada, y la formade representar esa dependencia es mediante los diagramas de Bode. En los diagramasde Bode representamos la ganancia 𝑔 (en decibelios) y el desfase 𝜑 (en grados) frente ala frecuencia:
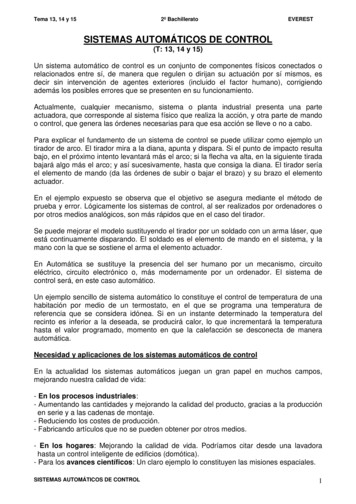
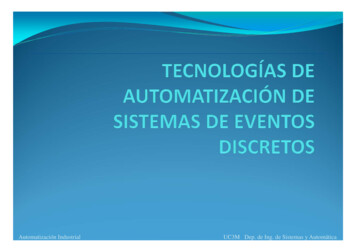
INGENIERÍA DE SISTEMAS Y AUTOMÁTICAFigura 1. Diagramas de Bode. Márgenes de fase y ganancia.A partir de los diagramas de Bode podemos definir los márgenes de fase y ganancia. Sedefine el margen de ganancia como la cantidad de ganancia (en decibelios) que hay queañadir a un sistema para que la ganancia del sistema sea de 0 dB a la frecuencia a la quesu fase es de -180º (frecuencia de cruce de fase). De forma similar, definimos el margende fase como el desfase que debemos añadir a un sistema para que su fase sea de -180ºa la frecuencia a la que la ganancia es de 0 dB (frecuencia de cruce de ganancia).En sistemas de fase mínima (sistemas sin polos ni ceros en el semiplano complejo departe real positiva), los márgenes de fase y ganancia nos proporcionan la estabilidad delsistema cuando lo controlamos mediante una realimentación negativa y unitaria. Unsistema de fase mínima es estable si ambos márgenes son positivos. En ese caso, lainterpretación de los márgenes de fase y ganancia es la siguiente: el margen de ganancia(o fase) nos dice cuánto podemos aumentar la ganancia del sistema en bucle abierto (ocuánto podemos retrasar un sistema en bucle abierto, en el caso del margen de fase)antes de que el sistema se vuelva inestable en bucle cerrado (considerando que el buclese cierra mediante una realimentación negativa y unitaria). En esta práctica vamos aanalizar esta interpretación de los márgenes de fase y ganancia con algunos sistemas defase mínima, y también vamos a estudiar su relación con el lugar de las raíces.Además, estudiaremos el diseño de sistemas de control en el dominio de la frecuencia,comprobando las limitaciones de las redes de adelanto de fase.
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA2. RELACIÓN ENTRE EL LUGAR DE LAS RAÍCES Y LOS MÁRGENES DE FASE Y GANANCIAConsidera los siguientes tres sistemas de fase mínima:𝐺5 𝑠 𝐺9 𝑠 𝑠8 2 2𝑠 12𝑠 91.151𝑠 0.1774𝑠 8 0.739𝑠 9 0.921𝑠𝐺8 𝑠 1𝑠 1El sistema 𝐺9 𝑠 es el avión estudiado en la práctica 3, mientras que el sistema 𝐺8 𝑠 esun filtro paso-bajo con una frecuencia de corte de 1 rad/s. Para cada uno de estossistemas, responde a las siguientes cuestiones:a) Calcula el margen de ganancia y la frecuencia de cruce de fase, usando lafunción margin de Matlab.b) Mediante rltool, representar el lugar de las raíces y obtener el valor límite dela ganancia a partir de la que el sistema en lazo cerrado se torna inestable.¿Cuáles son los polos del sistema en lazo cerrado en el límite de la estabilidad?c) ¿Qué relación existe entre la ganancia límite obtenida en el apartado b y elmargen de ganancia obtenido en el apartado a? ¿Qué relación existe entre lafrecuencia de cruce de fase obtenida en el apartado a y los polos en el límite dela estabilidad, obtenidos en el apartado b?d) A continuación, simula en Simulink el lazo de control mostrado en la Figura 2,para cada uno de los tres sistemas considerados.
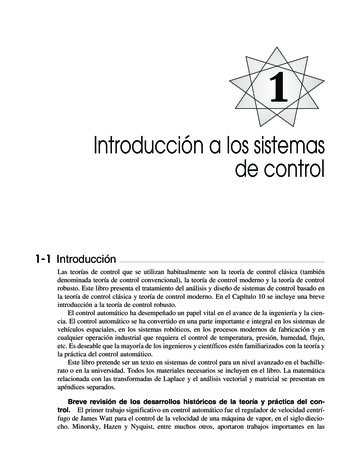
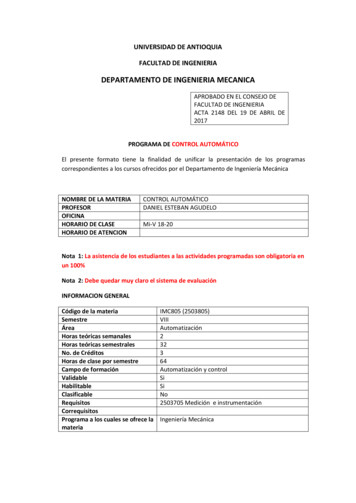
INGENIERÍA DE SISTEMAS Y AUTOMÁTICAFigura 2. Bucle de realimentación unitaria y negativa del sistema G(s), con un retardo de T segundos ala salida del sistema.En la parte superior de la Figura 2 se representa el esquema de control a simular,mientras que en la parte inferior de la misma figura se representa el modo deimplementar dicho esquema de control en Simulink. La entrada al lazo de controles un escalón unitario. El bloque 𝑒 CDE aplica un retardo de T segundos a la salidadel sistema G(s), y en Simulink puede implementarse dicho retardo mediante elbloque “Transport Delay” de la librería “Continuous”. Para simular el anteriorlazo de control, se deberán introducir los siguientes parámetros de configuración(en Simulation - Configuration parameters): Start time 0.0, Stop time 100,Solver options/Type Fixed-step, Fixed-step size 0.001, Solver ode3.Considerando estos parámetros de configuración, simula el esquema paradistintos valores del retardo T (prueba con T 0.05, 0.10, 0.15, 0.20, 0.25, 0.30 ),y observa la salida 𝑦 del lazo de control en cada caso. ¿Cómo varía la respuestadel sistema a medida que aumentamos el retardo? ¿Se vuelve inestable el lazode control a partir de cierto retardo límite? En caso afirmativo, encuentra (portanteo) el retardo límite Tlim a partir del que el sistema se vuelve inestable.e) Mediante margin, obtén el margen de fase 𝑀H (en grados) y la frecuencia decruce de ganancia 𝜔I (en rad/s). Pasa el margen de fase de grados a segundos,realizando la siguiente operación:𝑀H segundos 𝑀H grados𝜋 1180 𝜔I¿Qué relación existe entre el margen de fase 𝑀H (en segundos) y el retardo límiteTlim obtenido por tanteo en el apartado anterior?
INGENIERÍA DE SISTEMAS Y AUTOMÁTICAf) ¿Cómo evolucionan los polos del sistema en bucle cerrado a medida quevariamos el retardo T del apartado d? Para responder a esto, obtén primero laecuación característica del sistema en lazo cerrado de la Figura 2. Seguidamente,el profesor mostrará en el proyector las soluciones de la ecuación característica.3. DISEÑO EN EL DOMINIO DE LA FRECUENCIASiguiendo el procedimiento estudiado en las sesiones de teoría, diseña una red deadelanto de fase para que el sistema 𝐺5 𝑠 (sin considerar ningún tipo de retardo T)verifique los siguientes requisitos: Error de posición en bucle cerrado 5% Margen de fase en bucle abierto 60ºTras diseñar la red de adelanto de fase, comprueba si el sistema compensado con dichared cumple los requisitos de diseño, empleando los comandos margin (para comprobarel margen de fase del conjunto sistema regulador) y step (para comprobar el error enrégimen permanente del sistema en bucle cerrado).En caso de que la red diseñada no cumpla las especificaciones de diseño:a) ¿A qué puede ser debido?b) Diseña una red de adelanto de fase multi-etapa (por ejemplo, de 2 etapas) quesí cumpla los requisitos de diseño.
ANÁLISIS Y DISEÑO DE SISTEMAS DE CONTROL EN EL DOMINIO DE LA FRECUENCIA Profesor: Adrián Peidró (apeidro@umh.es) OBJETIVOS Afianzar los conocimientos sobre la respuesta en frecuencia de un sistema. Estudiar la relación entre los márgenes de fase/ganancia y el lugar de las raíces.