Transcription
PHYSICAL REVIEW E 93, 033005 (2016)Elastic theory of origami-based metamaterialsV. Brunck,1 F. Lechenault,1 A. Reid,1,2 and M. Adda-Bedia11Laboratoire de Physique Statistique, Ecole Normale Supérieure, UPMC Université Paris 06, Université Paris-Diderot, CNRS,24 rue Lhomond 75005 Paris, France2Department of Physics, North Carolina State University, North Carolina 27695, USA(Received 16 July 2015; revised manuscript received 8 January 2016; published 22 March 2016)Origami offers the possibility for new metamaterials whose overall mechanical properties can be programedby acting locally on each crease. Starting from a thin plate and having knowledge about the properties of thematerial and the folding procedure, one would like to determine the shape taken by the structure at rest and itsmechanical response. In this article, we introduce a vector deformation field acting on the imprinted network ofcreases that allows us to express the geometrical constraints of rigid origami structures in a simple and systematicway. This formalism is then used to write a general covariant expression of the elastic energy of n-creases meetingat a single vertex. Computations of the equilibrium states are then carried out explicitly in two special cases:the generalized waterbomb base and the Miura-Ori. For the waterbomb, we show a generic bistability for anynumber of creases. For the Miura folding, however, we uncover a phase transition from monostable to bistablestates that explains the efficient deployability of this structure for a given range of geometrical and mechanicalparameters. Moreover, the analysis shows that geometric frustration induces residual stresses in origami structuresthat should be taken into account in determining their mechanical response. This formalism can be extended to ageneral crease network, ordered or otherwise, and so opens new perspectives for the mechanics and the physicsof origami-based metamaterials.DOI: 10.1103/PhysRevE.93.033005I. INTRODUCTIONSince the mid-1980s, the ancient art of paper foldinghas evolved into a fertile scientific field gathering distantdisciplines. Using the mathematics of flat foldability [1,2],computational origami has made possible the creation ofan enormous amount of new designs. The interest has alsoswitched from the depiction of concrete objects like thetraditional cranes of Japan’s Edo period to abstract structureslike tessellations, whose strange mechanical properties havearoused the curiosity of engineers and physicists alike. Origamimetamaterials display, for example, auxetic behavior [3,4]and multistability [5–7], the latter allowing reprogrammablereconfigurations [8].Ubiquitous in nature where permanent creases can form asa result of growth in a constraining container (e.g., dragonflywings [9] and petal leaves [10,11]), origami structures arealso well represented in domains where strength or deployableproperties are attractive benefits, be it in fashion [12,13], architecture [14], medicine [15], or engineering, from airbags toconsumer electronics to deployable space structures [16–20].In all these areas, a question of paramount importance is howa particular crease affects the shape and mechanical propertiesof the overall structure.To answer this question the folds are usually modeled byelastic hinges of specific stiffnesses and rest angles. In thisapproach, each crease lies at the intersection between twopanels, whose response is governed by a length scale L thatcontrols whether the panels actually bend or fold [21,22].More precisely, this origami length L B/κ is the ratiobetween the bending modulus B of the faces and the torsionalstiffness κ of the crease. When the typical length of the panelsis small compared to L , the system behaves as a rigid origami,with faces remaining mostly undeformed and creases actuatingwhen submitted to stress. On the other hand, if the faces typical2470-0045/2016/93(3)/033005(14)size is larger than L , then the mechanical response will begoverned by the bending of the sheet, while the angles of thecreases will essentially keep their rest value [7]. The existenceof the length scale L restricts the apparent scalability oforigami structures. Nevertheless, we look in the followingat the realm of rigid origami, which corresponds to takingsystems with infinitely rigid faces and flexible creases.The process of making an origami structure consists inprinting a given planar graph on a flat sheet, which definesthe reference state, and then applying a plastic deformation tothis network that assigns to each edge a given stiffness andrest angle. The three-dimensional shape taken by the structureis a minimizer of the mechanical energy subject to kinematicconstraints. For this purpose, the first step is to consider asingle vertex with n creases coming out of it, which constitutesthe building block of any origami tessellation. In the caseof rigid origami, the standard approach is to find the energyminimum of such a vertex by summing over the creases, eachone havingκi and rest crease angle ψi0 : n different stiffness0 2Eh i 1 κi (ψi ψi ) /2, where ψi is the opening angleof the ith fold [4,5]. This energy must be supplemented bythe geometrical constraints that the faces remain rigid duringdeformation. However, in many practical applications theseconstraints are not explicitly given in terms of the foldsangles ψi , which forces us to adapt the energy minimizationprocedure for each study. This approach is thus not convenientfor building a general framework for the elasticity of origamistructures.Here we provide a description of origami tessellations byexpressing the deformation in terms of the vectors carried bythe crease network instead of the folds angles. This approachoffers us the possibility to take into account the geometricfrustration using the same field of vectors, which rendersenergy minimization systematic and straightforward. Becauseorigami can be seen as a three-dimensional deformation of033005-1 2016 American Physical Society
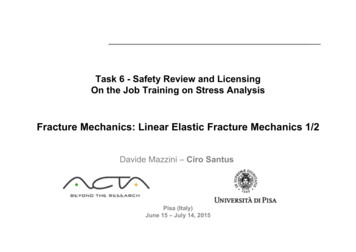
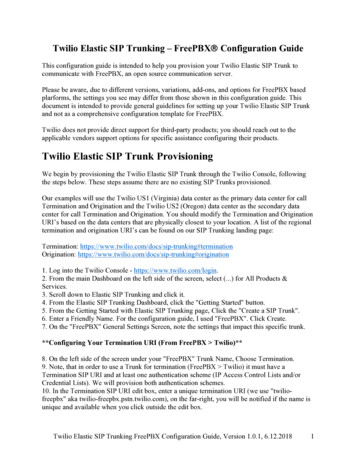
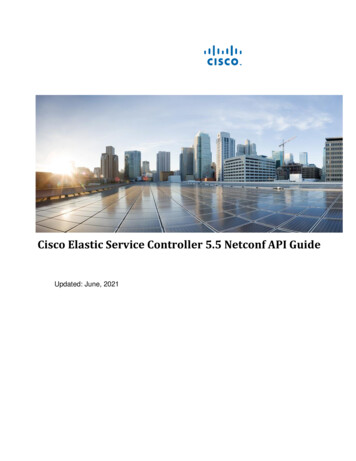
V. BRUNCK, F. LECHENAULT, A. REID, AND M. ADDA-BEDIAPHYSICAL REVIEW E 93, 033005 (2016)For ψ ψ0 , one recovers the usual energy of an elastichinge [4–7,22]Eh FIG. 1. The geometry of a single straight crease can be describedby its length L and the three unit vectors ( u, v ,w). an initially flat planar graph, the vector field carried by thecrease network is a natural measure of the deformation of suchfolded structures that allows for studying complex origamidesigns [23] and models of crumpled paper [24].After detailing our approach, we apply it to two specialcases that have the advantage of exhibiting a single degree offreedom: the generalized waterbomb base and the Miura-Ori.These are well studied systems allowing for comparison toexisting literature. By displaying applications of our description, we hope to convey its ability to solve a vast array ofproblems in rigid origami by applying a simple and systematicprocedure.II. EQUILIBRIUM STATE OF A SINGLE CREASEWe begin by considering a single straight crease of lengthL, that we simply model by the intersection of two rigid planarpanels. The geometry of the crease and the faces can then bedescribed by three unit vectors (Fig. 1): ( u,w) for the first planeand ( v ,w) for the second one, such that u · w v · w 0 andw lies along the crease.Let us compute the elastic energy per unit length Estored in the crease. Being a scalar invariant quantity, E isa linear combination of the invariants built from the set ofvectors describing the geometry of the system. Here the onlynonvanishing quantities are the scalar product u · v and thetriple product ( u v ) · w. However, the latter term is a scalar ifw is a pseudovector (since u v is a pseudovector). Therefore,w should be written asw u v . u v (1)12L κ (ψ ψ0 )2 E0 ,(5)where E0 is a constant, κ is the stiffness, and ψ0 is therest angle of the crease (the angle in the absence of externalloading [21,22]). The quadratic expression of the energy (5)sets the physical meaning of the constants λ and μ throughEq. (3) and shows that the covariant energy (2) does notintroduce additional material parameters.Equation (4) shows that the energy landscape is even withrespect to ψ π and is cusped at that location for all ψ0 0. Moreover, two equilibrium configurations are possible forψ [0,2π ],ψ ψm ψ0andψ ψv 2π ψ0 .(6)However, the result ψv 2π ψm indicates that these twosolutions correspond to the same state of the crease but“observed” from the two different sides of the folded sheet.Therefore, expressing the energy of the crease in terms ofthe vectors associated with the faces allows us to capture themirror-symmetry without enforcing it. The combination of thisresult with the cusp in the energy at ψ π restricts the creaseequilibrium angle ψm (respectively, ψv ) to vary in the interval[0,π ] (respectively, [π,2π ]). This physically based limitingangle variation is in agreement with the behavior of creasedsheets in real materials.For a single fold, the crease energy as given by Eq. (5)is reasonable for several applications [22,25]. However, weshow in the following that for the case of interacting creasesthe parametrization of the crease energy in terms of thevectors ( u, v ,w) becomes relevant. Finally, notice that suchparametrization is not unique, and, instead, one could usethe unit vectors ( nu , nv ,w), where ( nu , nv ) are the normals tothe faces, and retrieve Eq. (4). Nevertheless, starting fromEq. (2) allows us to set a general framework for the elasticityof origami designs.III. ENERGY OF A SINGLE VERTEXWe now extend our approach to determine the energy of avertex with n-creases of possibly different lengths Li (Fig. 2).Because every origami network, ordered or otherwise, can bedecomposed into a collection of such vertices, this structureThe leading order contributions to the elastic energy of thecrease are then given by:E L E( u, v ,w) L (λ u · v μ ( u v ) · w), (2)where λ and μ are material real constants. Note that Eq. (1)ensures that the crease energy (2) is invariant under thetransformation u v . With the notations of Fig. 1, one hasu · v cos ψ and ( u v ) · w sin ψ . We then introduce κand ψ0 [0,π ], such thatλ κ cos ψ0 , μ κ sin ψ0 ,allowing us to rewrite Eq. (2) as L κ cos(ψ ψ0 )E L κ cos(ψ ψ0 )for 0 ψ π.for π ψ 2π(a)(3)(4)(b)FIG. 2. n-creases meeting at a single vertex. (a) The imprinted ipattern of creases is described by their lengths Li and unit vectors wseparated by angles αi (i 1, . . . ,n). (b) A subset of three adjacentcreases after deformation.033005-2
ELASTIC THEORY OF ORIGAMI-BASED METAMATERIALS(a) MountainPHYSICAL REVIEW E 93, 033005 (2016)(b) ValleyFIG. 3. Definition of mountain and valley creases.constitutes the building block of any rigid origami design. Foreach crease, we define the unit vector w i , taken along theith crease and pointing outward from the vertex, and the unitvectors u i , v i (see Fig. 2). We also introduce for each creasethe material constants:λi κi cos ψi0 ,μi κi sin ψi0 ,(7)with κi and ψi0 the stiffness and rest angle of the ith crease asimposed by the operator when machining the structure. Let αibe the angle between w i and w i 1 , with ni 1 αi 2π , anduse the periodic convention w i n w i . Because we considerthe rigid face limit, this angle remains constant during thedeformation of the sheet from its initial flat state to the foldedone. We then have n constraints given by: i · w i 1 cos αi 0,Ci wi 1, . . . ,n.(8)As there is no interaction between the folds apart from thegeometrical constraints, the energy of the vertex is obtainedby summing over all creases,E n Li [λi u i · v i μi ( ui v i ) · w i ].(9)i 1Note that the directions of w i are fixed independently of thedirections of u i and v i (see Fig. 2). Thus one has ( ui v i ) ·w i sin ψi , where the crease angle ψi is now defined as theoriented angle (u vi ). This writing does not modify the resultsi , of Sec. II and allows us to introduce the so-called mountainand valley creases (see Fig. 3).Figure 2(b) shows that each panel contains four vectors. Forexample, the left panel in Fig. 2(b) contains (w i 1 ,w i , vi 1 , ui ), i , vi , ui 1 ). Since twowhereas the right panel contains (w i 1 ,wvectors are sufficient to define each plane, one can write twovectors as a combination of the two others. Therefore thereexists a decomposition of u i and v i in terms of (w i 1 ,w i ,w i 1 ),so we can rewrite Eq. (9) using the crease vectors w i only.A simple and visual way to find such a decomposition isto use the orthonormal base (u i ,w i u i ,w i ) (Fig. 4), in whichone hasv i (cos ψi , sin ψi ,0),(10)w i 1 (sin αi 1 ,0, cos αi 1 ),(11)w i 1 (sin αi cos ψi , sin αi sin ψi , cos αi ).(12)FIG. 4. The projections of the vectors v i , w i 1 , and w i 1 in theorthonormal base (u i ,w i u i ,w i ).Then one can show that i 1 cos αi 1 cos αiw i 1 · w,sin αi 1 sin αi i 1 ) · w i(w i 1 w( ui v i ) · w i .sin αi 1 sin αiu i · v i (13)(14)Using this result, one finds that Eq. (9) is transformed into:E n L̃i [λi w i 1 · w i 1 μi (w i 1 w i 1 ) · w i ], (15)i 1where a constant term has been discarded (the αi ’s being fixed)andLi(16)L̃i sin αi sin αi 1is an effective length of the ith crease.The elastic energy of the vertex is expressed only in termsof the field w i that completely describes the deformation of thecrease network. Moreover, the geometric constraints (8) andthe conditions w i 2 1 are also given in terms of the samefield of vectors. Therefore, the equilibrium configuration of thevertex can be determined by minimizing the following energyfunctional:nn E E γi Ci δi ( w i 2 1),(17)i 1i 1where γi and δi are Lagrange multipliers. The minimizationwith respect to the components of the vectors w i , γi , and δiyields a closed system of 5n equations. The crease a
PHYSICAL REVIEW E 93, 033005 (2016) Elastic theory of origami-based metamaterials V. Brunck, 1F. Lechenault, A. Reid, 1,2 and M. Adda-Bedia 1Laboratoire de Physique Statistique, Ecole Normale Sup erieure, UPMC Universit e Paris 06, Universit e Paris-Diderot, CNRS, 24 rue Lhomond 75005 Paris, France 2Department of Physics, North Carolina State University, North Carolina 27695, USA