Transcription
roboticsArticleTowards Bio-Inspired Chromatic Behaviours inSurveillance RobotsSampath Kumar Karutaa Gnaniar 1,2, *, Rajesh Elara Mohan 3 , Edgar A. Martinez-Garcia 2 andRoberto C. Ambrosio Lazaro 2,41234*School of Electrical and Electronic Engineering, Singapore Polytechnic, Singapore 139651, SingaporeInstitute of Inginieria and Technology, Universidad Autonoma de Ciudad Juárez, Ciudad Juárez 32310,Mexico; edmartin@uacj.mx (E.A.M.-G.); roberto.ambrosio@correo.buap.mx (R.C.A.L.)Engineering Product Development Pillar, Singapore University of Technology and Design, Singapore 487372,Singapore; rajeshelara@sutd.edu.sgDepartment of Electronics, Benemerita Universidad Autonoma de Puebla, Puebla 72000, MexicoCorrespondence: SampathKumar@sp.edu.sg; Tel.: 65-6879-0632Academic Editor: Huosheng HuReceived: 30 June 2016; Accepted: 26 September 2016; Published: 29 September 2016Abstract: The field of Robotics is ever growing at the same time as posing enormous challenges.Numerous works has been done in biologically inspired robotics emulating models, systems andelements of nature for the purpose of solving traditional robotics problems. Chromatic behaviours areabundant in nature across a variety of living species to achieve camouflage, signaling, and temperatureregulation. The ability of these creatures to successfully blend in with their environment andcommunicate by changing their colour is the fundamental inspiration for our research work. In thispaper, we present dwarf chameleon inspired chromatic behaviour in the context of an autonomoussurveillance robot, “PACHONDHI”. In our experiments, we successfully validated the ability of therobot to autonomously change its colour in relation to the terrain that it is traversing for maximizingdetectability to friendly security agents and minimizing exposure to hostile agents, as well as tocommunicate with fellow cooperating robots.Keywords: chromatic behaviour; bio-inspired robots; dwarf chameleons; camouflage; security robots1. IntroductionThe key for all the complex human problems is hiding in nature and we have to unearth it. If wetraverse through the journey of natural evolution, we can come across plenty of evidence to the factthat living creatures have developed strong adaptive mechanisms and processes over millions of years,which offers a lot of potential for imitation into artificial models, systems and processes to solve ourhuman problems. The enormous growth of a bio-inspired robotic field in recent times, is due to thetechnological inspiration it has acquired from the biological arena.Robotic researchers were inspired by animal species such as huntsman spiders [1], dogs [2] andsnakes [3]. As a result, highly efficient mechanisms, locomotion control sensing and autonomousbehavioural strategies have arrived. The Cerebrunnus rechenburgi spider is mimicked [4] bya reconfigurable quadruped robot mechanism and a new energy based control approach has beenpresented which can crawl, roll and transform between the two states. For the purpose of evaluatingcontrol principles extracted from the cockroach, the design and simulation of a cockroach inspiredhexapod robot is presented in [5]. The cockroach was chosen due to its remarkable running andclimbing capabilities, and the widely available information on its biomechanics and control. Anotherstudy [6] presents a spinal cord model and its synthesis in an amphibious salamander inspired robotdemonstrating how a primitive neural circuit used for swimming locomotion can be extended byRobotics 2016, 5, 20; botics
Robotics 2016, 5, 202 of 16phylogenetically more recent limb oscillatory centres to explain the ability of salamanders to switchbetween swimming and walking. A cricket, like a jumping mini robot, with a concept and designof a novel artificial hair receptor for the bio inspired sensing system of micro intelligent robots,is presented in [7]. The concept is derived from the natural hair receptor of animals, also known ascilium or filiform hair by several researchers, which is generally used as a vibration receptor or a flowdetector by insects, mammals and fishes. A multi-robot architecture based on wolf packs is studiedunder different formations during pray hunting and predator avoidance is presented in [8]. The modelhas been developed and tested using the neural simulation language/abstract simulation language(NSL/ASL), mobile internet robotics (MIRO) systems and Sony artificial intelligence robot (AIBO)robots. In [9] the use of a biological behaviour found in many spices of birds to form lek is exploredto guide the creation of groups of robots. As it demonstrates a group of individual entities formingaround a scarce resource, it provides a sound basis for multi-robot formation.Chromatism in living species, a process in which a species changes its body colour serves a widerange of purposes (viz); camouflage [10], an animal changes its colour to that of the environment;signaling [11], bodily colours are used for communicating information such as warning, sexualstatus and social interactions; and physical protection [12], an animal changes its bodily colour tosafeguard itself from a harm due to an environmental or internal biological process. Cattle fish [13]realize dynamic camouflage by quickly acquiring visual information from the environment andneurally synthesizing appropriate skin colourations, Australian crab spiders [14] catch pollinatinginsects, such as honey bees on flowers, and can change their body colour between yellow andwhite. Many Chameleons, panther chameleons [15] in particular, have the ability to realizecomplex and dynamic colour changes during social interactions such as male contests or courtship.Male grasshoppers of the Kosciuscolatraistis species [16] in the Australian Alps immediately changefrom being dark that is almost black at low temperature, to a bright sky blue colour when exposed towarmth, which is a remarkable thermochromatic characteristic. The lizard, Anolis carolinensis [17],responds instantly to the colour of the environment by changing its skin colour to a bright greenin the light and dark brown in the dark coloured environment. This change in colour involvesMelanophore stimulating hormone from the pituitary gland. The Brachyurid species [18] have variouscolouration patterns that fluctuate among individuals due to behavioural interactions or a changingenvironment. In the fiddler crab, Ucapugilator, the historical notion is that colour change is regulatedby circadian rhythms.Synthesizing chromatic behaviour in robots remains as an untouched field for a longtime. A simplemicro fluidic network that can change the colour, contrast, pattern, apparent shape, luminescence andsurface temperature of soft machines for camouflage and display is studied in [19]. In [20], synthesis offacial colour expression using red Electro Luminance (EL) sheets for a humanoid robot heed to mimicsocial communication among humans is discussed. A novel system is proposed in [21] which expressesemotions for a robot by effectively changing the colour luminosity of its body using an LED luminousdevice. We elaborate in this paper, chromatic behaviours inspired from dwarf chameleons in the contextof an autonomous surveillance robot, “PACHONDHI”. The fact that this species can demonstrate itscolour change response in relation to specific predators with varying visual capabilities, in addition tothe colour of the terrain, has driven us to mimic dwarf chameleons. The ability of our developed robotto autonomously tailor the colour change in relation to the terrain in response to a pre-defined set ofstimuli (viz) conspecifics and predators is established successfully in our experiments.The espionages in urban areas are risky and tricky, particularly when entering buildings whereno prior intelligence information is available. Current espionage missions involve sending out securitypersonnel to specific locations, the use of fixed sensors and more recently the use of autonomousrobotic vehicles to procure information. Equipped with imagery and maps of outdoor and indoorareas, a robot could autonomously estimate threat level, number of hostile agents and victims; conductactivity monitoring; track threats; and predict safer routes before human personnel could enter,avoiding any direct risk to humans [22]. We are, in our present research, attempting to expand thecamouflaging capabilities of these robots, building upon our earlier work [23]. The capability of
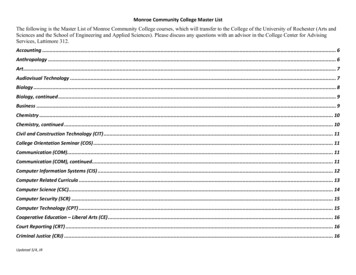
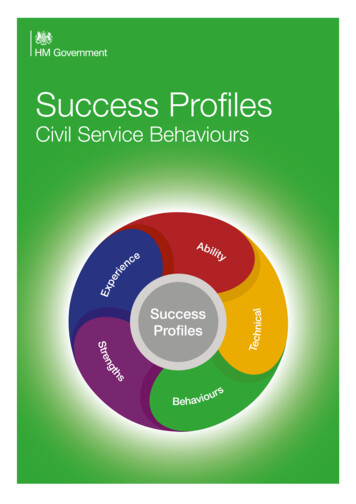
Robotics 2016, 5, 203 of 16a surveillance robot to camouflage itself while on a mission and highlight its presence when beingrecovered—a characteristic that is critical for such security platforms—is established in the proposeddesign. Synthesizing chromatic behaviours in robots faces several challenges, such as the developmentof efficient approaches to colour generation, seamless integration of the same into a mobile roboticplatform and the non-trivial process of implementing terrain and object recognition that acts as a triggerfor the colour change.A bag of visual words generated from speeded up robust features with a support vector machineclassifier is used to achieve recognition of an object of interest whereas the terrain classification isRobotics 2016, 5, 203 of 16achieved usinga blob based detection algorithm. All these aspects are elaborated uponin this paper,concludingexpandwith efabricatedinthe camouflaging capabilities of these robots, building upon our earlier work [23]. Thehouse withcapabilitya surveillancerobotto camouflagewhilepaperon a missionand highlightits presencea minimum amountofofoff-the-shelfparts.The restitselfof thisis structuredas follows.when being recovered—a characteristic that is critical for such security platforms—is established inSection 2 presents a discussion about chromatic behaviours in dwarf chameleons and an extractedthe proposed design. Synthesizing chromatic behaviours in robots faces several challenges, such asmodel for applicationinofourroboticplatform.Therobotic seamlessarchitecture,“PACHONDHI”,the developmentefficientapproachesto colourgeneration,integrationof the same into used fora mobilerobotic platform andthe non-trivialprocess of implementingterrain and objectrecognitionsynthesizingand experimentingwiththe autonomouschromatic behaviours,inspiredby the dwarfas a triggerinforSectionthe colour3.change.chameleon,thatis actsdiscussedExperiments and results validating the proposed researchA bag of visual words generated from speeded up robust features with a support vector machineapproach aredescribed in Section 4. Finally, Section 5 concludes this study and discusses future scope.classifier is used to achieve recognition of an object of interest whereas the terrain classification isachieved using a blob based detection algorithm. All these aspects are elaborated upon in this paper,2. Methodsconcluding with experimental results using our “PACHONDHI” prototype fabricated in house witha minimum amount of off-the-shelf parts. The rest of this paper is structured as follows.chromatic behaviours in dwarf chameleons and anextracted model for application in our robotic platform. The robotic architecture, “PACHONDHI”,The chromaticbehaviourandin experimentingdwarf chameleonsthe centerchromaticof bio-inspirationson whichused for synthesizingwith theisautonomousbehaviours, inspiredby this workthe dwarfis discussedin SectionExperimentsand resultsthe proposedis constructed.Theychameleon,are capableof changingtheir3. skincolourationand validatingpattern throughfusion of pink,research approach are described in Section 4. Finally, Section 5 concludes this study and discussesblue, red, orange,green, light blue, turquoise, purple, brown and black [24]. By varying the wavelengthfuture scope.Chromatic Behaviours in the Dwarf Chameleonof the light reflectedoff the guaninethat are presentbeneatha superficialonlayerunderThe chromaticbehaviour crystalsin dwarf chameleonsis the centerof bio-inspirationswhichthis their skin,work isisconstructed.They[25].are capableof changingreasonstheir skinforcolourationandcolourationpattern throughthis colourationsynthesizedThe commonthe skinin fusionchameleons areof pink, blue,red, orange, green,lightblue, turquoise,purple, brownand blackBy varyingthethe social yoften[24].generatebrightercolourswavelength of the light reflected off the guanine crystals that are present beneath a superficial layerwhen theyretreatorescapefromathreat.under their skin, this colouration is synthesized [25]. The common reasons for the skin colouration inThis dwarf chameleonschameleonareisthenativethe CapeTown regionof the WesternCapeProvincein South Africa.social tosignaling,camouflagingand temperatureregulation.Theyoften generatebrighterchameleoncolours whenwillexpressingbehavioursand includingdarker colourswhentheyTheyretreatareor capable ofThe adult dwarfgrowaggressiveover 15 cmin lengththeirtail.escape from a threat. This dwarf chameleon is native to the Cape Town region of the Western Caperapid and significantskin colouration, saturation and pattern changes in response to physiologicalProvince in South Africa. The adult dwarf chameleon will grow over 15 cm in length including theirconditions tail.andTheyintentions[26].The andchromaticbehaviourof thesaturationDwarf andchameleon,correspondingtoare capableof rapidsignificantskin colouration,pattern changesindifferent states,is shownin Figure1.responseto physiologicalconditionsand intentions [26]. The chromatic behaviour of the Dwarfchameleon, corresponding to different states, is shown in Figure 1.Section in2 presentsa discussionaboutChromatic Behavioursthe DwarfChameleon(a)(b)Figure 1. Chromatic behaviour in the Dwarf chameleon representing its different states and respectiveFigure 1. Chromaticinrelaxedthe Dwarfchameleonrepresentingits differentstatesstate.and respectivecolour (a) forbehaviourmale m1 fromto excitedstate and (b)for male m2 fromrelaxed to excitedcolour (a) for male m1 from relaxed to excited state and (b) for male m2 from relaxed to excited state.
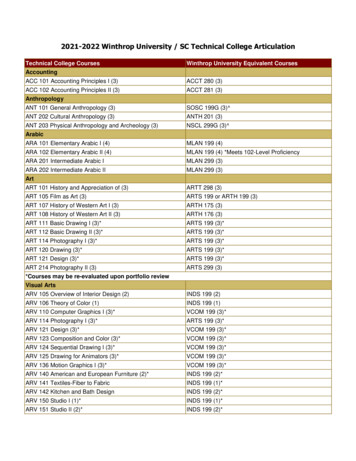
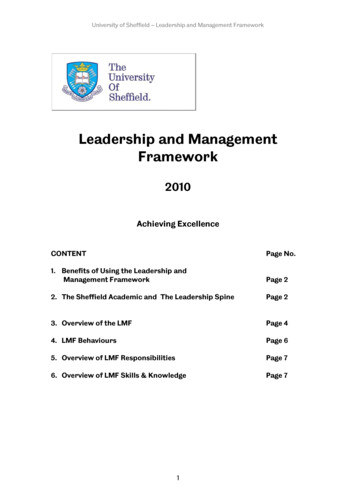
Robotics 2016, 5, 204 of 16It is discussed in [27] whether dwarf chameleons show varying chromatic behaviours throughcolour change in response to multiple predators that use different perception mechanisms (snake andbird) to target prays. This study found that dwarf chameleons exhibited colour change behavioursin response to both predators taking on a brighter achromatically contrast colour in the presenceof a snake compared to the bird, and also across a geographical context, background colourationand habitat morphologies. Further, they are also associated [28] with the use of colour change forsocial communication including male contests and courtships. They will maximize detectabilityto conspecifics while minimizing exposure to predators and this behaviour forms the centerpieceof our bio-inspiration model presented in this paper. The chromatic behaviour in the dwarfchameleon mainly involves eleven states: Roam, Classify Species, Colour Change Contrast,Colour Change Camouflage, Approach, Colour Change Communicate, Classify Intent, Pursue,Retreat, Hiding and Observe, as listed below as well as shown in Figure 2.1.2.3.4.5.6.7.8.9.Roam: It roams around looking for other species; if detected, “Species Detected” condition istriggered to enable the “Classify Species” state.Classify Species: It classifies the detected species into either conspecifics or specific type ofpredators (Type I Predator or Type II Predator). If conspecifics “Recognized” condition istriggered, the chameleon enables the “Approach” state to move immediately towards theconspecifics to attract attention. If “Type I Predator recognized” is activated, then the chameleonswitches to “Change Colour Camouflage” state. If “Type II Predator recognized” is activated,then the chameleon switches to “Colour Change Contrast” state. At this juncture, anotherpossibility is the activation of the “Species Lost” condition which leads back to the “Roam” state.Approach: The chameleon starts approaching the conspecific to gain attention. If the“Conspecifics Attention Gained” condition is activated, then the Colour Change Communicatestate is enabled whereas if the Conspecific Uncertain is activated, then the chameleon switchesback to the Classify Species state.Colour Change Communicate: At this stage, the dwarf chameleon engages in socialcommunication with the conspecifics using skin colouration. If the Colour Response Receivedfrom the interacting dwarf chameleon is activated, then the Classify Intent state is enabledwhereas if the Conspecific Attention Not Gained is activated then the chameleon switches backto the Approach state.Classify Intent: In this state, the chameleon classifies the detected intention based on thecolour response received from the interacting chameleon. If the Intent of Interest Recognizedcondition is triggered, the chameleon enables the Pursue state to immediately pursue towards theconspecifics. However, if the Intent of Uninterest Recognized is activated then the chameleonenables the Retreat state. Else, if Colour Response Not Received is activated then the chameleonswitches back to the Colour Change Communicate state.Pursue: In this state, the chameleon moves actively towards the conspecifics. If the Species Lostcondition is activated, then the chameleon switches to the Roam state. Else if the Intent Uncertainstate is activated then the Classify Intent state is enabled.Retreat: In this state, the chameleon falls back, moving away from the conspecifics. If theSpecies Lost condition is activated, then the chameleon switches to the Roam state. Else, if theIntent Uncertain state is activated then the Classify Intent state is enabled.Colour Change Camouflage: To hide itself from the Type I Predator, the chameleon alters itschromatophore functions to produce colours closer to that of the terrain it is traversing. If theColour Synthesized Camouflage condition is activated, then the chameleon enables the Hidingstate. Else, if the Type I Predator Uncertain condition is triggered, then the chameleon switchesback to the Classify Species state.Colour Change Contrast: To hide itself from the Type II Predator, the chameleon varies theactivity of different chromatophores in its layers of skin to produce contrasting colours in relation
Robotics 2016, 5, 20Robotics 2016, 5, 205 of 165 of 169.Colour Change Contrast: To hide itself from the Type II Predator, the chameleon varies theactivityof differentchromatophoresin its layers ofconditionskin to producecontrastingcolours into its background.If theColour Synthesized Contrastis activated,then the chameleonrelationto itsbackground.If theColour Synthesized Contrastenables theHidingstate. Else,if theType II Predator Uncertain conditioncondition isis activated,triggered, then thechameleon switchesenables backthe Hidingstate. Else, if theType II Predator Uncertain condition isto the Classify Speciesstate.chameleonswitchesback togoesthe Classify Speciesstate.mode to escape from10. triggered,Hiding: Inthenthisthestate,the dwarfchameleoninto a passive static10. vestaticmode toescapefrom aa predator with a synthesized skin colour in relation to the identified predatorandbackground.predatorwith a synthesizedskin colourin relationtheObserveidentifiedstatepredatorand background.If the Predator Activeconditionis activated,thentotheis enabled.However,Ifcondition is activated,the Observestateis enabled.However,theif thethe Predator ActiveColour Not Synthesized Contrastis thentriggeredthen thechameleongoesback toif theColour Not Synthesized lour Change Contrast state. Else, if the Colour Not Synthesized Camouflage is triggeredColour Change Contraststate.if the Colour Not Synthesized Camouflageis triggeredthen the chameleon goes backto Else,the Colour Change r Change Camouflagestate.11. Observe: In this state, the chameleon passively monitors the activity of the predator. If the11. Observe:In thisstate, thechameleonthenpassivelymonitorsgoesthe activityof thestate.predator.theSpecies Lostconditionis activated,the chameleonto the RoamElse, Ifif theSpecies Roamstate.Else,ifthePredator Inactive condition is triggered, then the Hiding state is enabled.Predator Inactive condition is triggered, then the Hiding state is enabled.Figure 2.2. TheThe eleveneleven specificspecific statesstates involvinginvolving chromaticchromatic behaviourFigurebehaviour ofof thethe DwarfDwarf chameleon.chameleon.3. Design and “PACHONDHI” Robot ImplementationThis section describes the “PACHONDHI” robot and its development, which has gone throughmany stages in the design of its mechanical structure, electronic control system and software architecture.
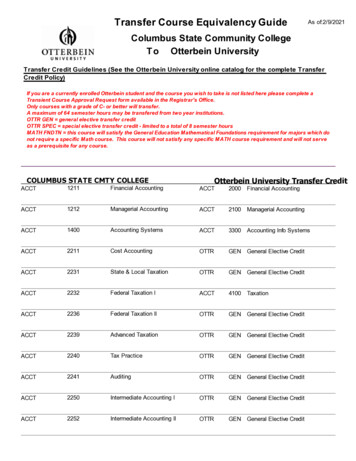
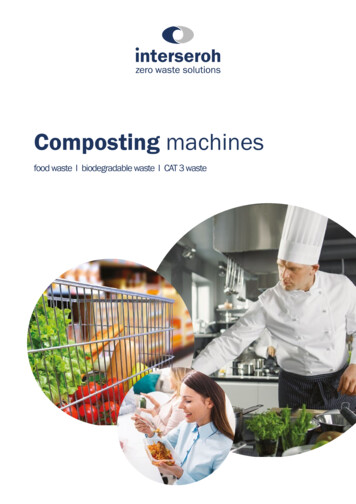
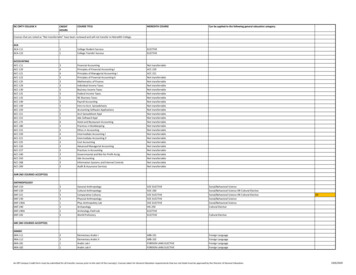
Robotics 2016, 5, 206 of 163. Design and “PACHONDHI” Robot ImplementationThis section describes the “PACHONDHI” robot and its development, which has gone throughthe design of its mechanical structure, electronic control system and software6 of 16architecture.many 2016,stagesRobotics5, 20inRobotRobot PlatformPlatformTheis aisrollingrobotbasedon theonprincipleof hemi-sphericalwheelsThe a rollingrobotbasedthe principleof rintofabout21.5cm 15cm 15cm.Thiswheels weighing about 800 g and has a smaller footprint of about 21.5 cm 15 cm 15 cm. This rollingrollingmechanismhighly maneuverable,maneuverable, allowingnegotiate smallersmaller obstacles,obstacles, aroundaround objectsobjects andandmechanism isis highlyallowing robotrobot toto . Another key advantage of “PACHONDHI” is that it cannot be overturned. Figure 3, showsthethe physicalphysical designdesign ofof “PACHONDHI”.“PACHONDHI”.Figure 3. Second generation of the “PACHONDHI” robot prototype.Figure 3. Second generation of the “PACHONDHI” robot prototype.The mechanical design of “PACHONDHI” consists of two plastic half spheres and a centralThe mechanical“PACHONDHI”consistsof twohalfspheresand(DC)a centralcylinder.The platformdesignhas a ofsinglecentral axle anduses directcurrent(DC)motors from Pololu for driving the wheels, to realize acceleration, deceleration and steering.gearmotors thefromPololufor drivingthe wheels,to resultsrealize DC motorsat differentspeedsteering andby motors,motors, turning on the spot can be achieved. The central cylinder contains all of the electronics,turningthe spotachieved.cylindercontains allbehaviourof the electronics,batteries,oncameraandcanDCbemotors.It hasThethreecentralcontrollersfor perception,and .The perception module is an integrated AiBall camera and its OpenCV based servermodule thatThe perceptionmodule is ancameraand itsserver modulethatis usedin “PACHONDHI”to integrateddetect andAiBallclassifyeventsof OpenCVinterest basedand terrainof .concurrently. The output of perception module is a set of significant events linked to the detection ofTheoutputagent,of perceptionmoduleis arobotset ofandsignificanteventslinkedto the detectionof a friendlya friendlyhostile agent,fellowterrain typebeingtraversed.The is anmodule is an Arduino Uno that holds the core responsibility for making the chromatic ions and locomotion actions based on the significant events detected by the perception module.locomotionactionsbased sendson theappropriatesignificant eventsdetectedby theperceptionThe behaviourThe behaviourcontrollerlocomotionactionssuchas turningmodule.right, actionssuchasturningright,movingstraightetc.to theetc. to the motor controller which, in turn, breaks it down into motors primitive to be sent otorsprimitivetobesenttothemotors.motors. Also, the behaviour controller sends specific messages to the LED interface pidsynthesizing the rapid colour change. Figure 4 shows the system level architecture specifications forcolourchange. Figure 4 shows the system level architecture specifications for “PACHONDHI”.“PACHONDHI”.
Robotics 2016, 5, 207 of 16Robotics 2016, 5, 207 of 16Figure 4. Control system architecture of the “PACHONDHI” robot.Figure 4. Control system architecture of the “PACHONDHI” robot.Currently, the developed platform allows for two modes of control: autonomous and teleoperation. Inthe developedtele-operationplatformmode, “PACHONDHI”remotelyofcontrolledusinga notebook andCurrently,theallows for cantwobe otiontele-operation. In the tele-operation mode, “PACHONDHI” can be remotely controlled usingand chromatic status of the robot guided by the visual streaming from the camera onboard the robot.a notebook or smart phone using Bluetooth connectivity where a human operator controls bothIn the autonomous mode, we implemented the dwarf chameleon model presented in Section 2the locomotionand chromaticroamsstatusaroundof thearobotby thestreamingfromagentsthe camerawherein “PACHONDHI”given guidedarea lookingforvisualfriendlyagents, hostileonboardthe robot.In theusingautonomousmode,we llow robotsonly visualfeatures.approach totheeventrecognitionis basedon objectin Section2 wherein“PACHONDHI”arounda givenarea oflookingfor friendlyagents,classificationworkpresented in [29],roamsand startswith theextractionrobust localfeatures runningontheOpenCVserverwhiletheimagesagents and/or fellow robots using only visual features. Our approach to event recognition is arebased oncaptured by anworkAiBallpresentedcamera runningonboardthe robot.algorithmuses Hessianmatrix usingobject classificationin [29],and startswith Thethe SURFextractionof robustlocal featuresto detect key points. Given a point u (x, y) in a given image M, the Hessian matrix H(u, σ) at pointthe speedup robust feature (SURF) algorithm running on the OpenCV server while the images areu and scale σ, is defined as follows,captured by an AiBall camera running onboard the robot. The SURF algorithm uses Hessian matrix to𝐿𝑥𝑦 (𝑢,𝑥𝑥 (𝑢, 𝜎)detect key points. Given a point u H(x,(u,y)σ)in a(𝐿givenimageM,𝜎)the) Hessian matrix H(u, σ) at(1) point u𝐿𝑥𝑦 (𝑢, 𝜎) 𝐿𝑦𝑦 (𝑢, 𝜎)and scale σ, is defined as follows,where, 𝐿𝑥𝑥 (𝑢, 𝜎), 𝐿𝑦𝑦 (𝑢, 𝜎) and 𝐿𝑥𝑦 (𝑢, 𝜎) are the second derivatives of!the image.Once the key points and descriptors are Lextractedthe(u,trainingL xyσ ) set, then the descriptors arexx ( u, σ )fromH (u, σ ) (1)clustered into N centroids using a standardunsupervised,clustering algorithm. TheL xyK-means,(u, σ) Lyy ( u, σ )extracted descriptors are then treated as a “Bag of Words”. For a test image acquired during the robotSURFis againusedto extractthe robustlocal features.descriptor is thenwhere,run,L xx theL xy (u,σ ) arethe secondderivativesof theEachimage.(u, σ), Lyyalgorithm(u, σ) andsynchronized to its equivalent visual word by finding the closest cluster centroid in the dictionary. AOnce the key points and descriptors are extracted from the training set, then the descriptors aresummary of the number of words for each test image is then passed to a support vector machineclusteredintobasedN centroidsa standardK-means, ningusingalgorithm.SVM’s non-linearsurface isgiven in Equation(2). The extracteddescriptors are then treated as a “Bag of Words”.For a test image acquired during the robot run,𝑁the SURF algorithm is again used to bextracttherobustfeatures. Each descriptor(2) is then (𝛼𝑖 𝑦𝑖 𝐾(𝑥,𝑥𝑖 )) local0synchronized to its equivalent visual word𝑖 1by finding the closest cluster centroid in the dictionary.A summarynumberof wordsfor iseachtest imagepassedvectormachinewhere, ofthetheinputto the SVMalgorithmthe trainingdatais{(xtheni, yi)} inwhichtoxi, ais supportthe featuredata andi, is thelearninglabel either 1 or 1. WeSVM’sused Gaussianradialbasis function(RBF)for ourpresented(SVM) ybasedalgorithm.non-lineardecisionsurfaceis giveninworkEquation(2). inNb (αi yi K ( x, xi )) 0(2)i 1where, the input to the SVM algorithm is the training data {(xi , yi )} in which xi , is the feature data andyi , is the label either 1 or 1. We used Gaussian radial basis function (RBF) for our work presented in
Robotics 2016, 5, 208 of 16this paper due to its proven computation efficiency as compared to other variants of kernel function asgiven in Equation (3).K ( x, xi ) e γ x xi 2 , γ 0(3)where, γ is the kernel parameter.The feature vector coefficient weights αi and b in the above equation are the solutions ofa quadratic programming problem. For the recognition phase, a summary of the number of words foreach test image is then passed to a SVM classifier to categorize the image by the event types dependingon presence of a friendly agent,
detectability to friendly security agents and minimizing exposure to hostile agents, as well as to communicate with fellow cooperating robots. Keywords: chromatic behaviour; bio-inspired robots; dwarf chameleons; camouflage; security robots 1. Introduction The key for all the complex human problems is hiding in nature and we have to unearth it .