Transcription
This may be the author’s version of a work that was submitted/acceptedfor publication in the following source:Zhou, Yue, Cholette, Michael, Bhaskar, Ashish, & Chung, Edward(2018)Automated on-ramp merging and gap development with speed constraints- A state-constrained optimal control approach.In Lin, Z (Ed.) Proceedings of the 2018 Annual American Control Conference (ACC).IEEE, United States of America, pp. 4975-4982.This file was downloaded from: https://eprints.qut.edu.au/120912/c Consult author(s) regarding copyright mattersThis work is covered by copyright. Unless the document is being made available under aCreative Commons Licence, you must assume that re-use is limited to personal use andthat permission from the copyright owner must be obtained for all other uses. If the document is available under a Creative Commons License (or other specified license) then referto the Licence for details of permitted re-use. It is a condition of access that users recognise and abide by the legal requirements associated with these rights. If you believe thatthis work infringes copyright please provide details by email to qut.copyright@qut.edu.auNotice: Please note that this document may not be the Version of Record(i.e. published version) of the work. Author manuscript versions (as Submitted for peer review or as Accepted for publication after peer review) canbe identified by an absence of publisher branding and/or typeset appearance. If there is any doubt, please refer to the published source.https://doi.org/10.23919/ACC.2018.8430796
2018 Annual American Control Conference (ACC)June 27–29, 2018. Wisconsin Center, Milwaukee,USAAutomated On-Ramp Merging and Gap Development with SpeedConstraints – A State-Constrained Optimal Control ApproachYue Zhou, Michael E. Cholette, Ashish Bhaskar, and Edward Chung Abstract— This paper presents an automated trajectoryplanning method for motorway on-ramp merging and gapdevelopment based on connected and automated vehicles. Themethod is composed of two relevant optimal control problems –one for the mainline facilitating vehicle and one for the on-rampmerging vehicle. Previous studies have shown that the speed offacilitating maneuver of a mainline vehicle to develop a suitablegap for accommodating an on-ramp merging vehicle could dropto an undesired low level under some conditions. To address thisissue, this paper formulates the trajectory planning task of thefacilitating vehicle as a state-constrained optimal controlproblem. The optimal control problem is constrained in thecontrol variable as well. Moreover, the optimal control problemof the facilitating vehicle features flexible terminal time (mergelocation) which is automatically determined in the optimizationprocess. The Pontryagin Maximum Principle is applied to solvethe optimal control problems. The solutions are thenimplemented in a recursive fashion so as to accommodateconstantly changing external environment. A numericalexample is conducted to demonstrate the effectiveness of theproposed methodology.I. INTRODUCTIONMotorway on-ramp merge sections can contribute to traveldelay [1], cause capacity drop [2], cause traffic instabilities[3], and excessive vehicular emissions [4]. Conventionally,ramp metering is used to regulate macroscopic traffic statevariables (e.g. density, occupancy, flow rate) by controllingon-ramp inflow rate. However, ramp metering is unable toregulate movements of individual vehicles. In particular,ramp metering cannot interfere with movements of mainlinevehicles which are critical in creating suitable gaps formerging vehicles. Connected and automated vehicle (CAV)technologies are providing new opportunities to manageindividual vehicle trajectories and have initiated newperspectives for improving traffic operations at on-rampmerge sections.Automated on-ramp merging and gap developmentstrategies can be broadly classified into two categories:feedback control and optimization approaches. Feedbackcontrol strategies e.g. [5-7], are simple but are in general notoptimal in any sense. Moreover, they are unable tosimultaneously satisfy terminal speed and gap requirements.Optimization approaches have been explored in a couple ofThis work was supported by Queensland University of Technology.Yue Zhou (e-mail: y59.zhou@hdr.qut.edu.au) is with the Smart TransportResearch Center, School of Civil Engineering and Built Environment,Science and Engineering Faculty, Australia.Michael E. Cholette (e-mail: michael.cholette@qut.edu.au) is with theSchool of Chemistry, Physics and Mechanical Engineering, Science andEngineering Faculty, Queensland University of Technology, Australia.978-1-5386-5428-6/ 31.00 2018 AACC1studies, e.g. [8-11]. Among these, [9, 10] derived analyticalsolutions for the optimal control problems of vehicletrajectory planning. Compared to numerical solutions, themain advantage of analytical solutions is that they have highercomputational efficiencies and thus are more suitable foronline applications such as model predictive control (MPC).Control bounds, i.e. the limits of vehicle acceleration, werenot taken into account by [9, 10]. Zhou et al. [12] explicitlyconsidered the limits of vehicle acceleration and derivedanalytical solutions for the control-constrained optimalcontrol. No existing studies, however, have considered thespeed constraint in formulating optimal control problems.However, previous studies [10, 11] have indicated that thespeed of facilitating maneuver of a mainline vehicle todevelop a suitable gap for accommodating an on-rampmerging vehicle could drop to an undesired low level undersome conditions. Therefore, it is desirable to impose aconstraint on the speed of the facilitating manoeuvre so as tomitigate its negative impact on mainline traffic.In this paper, we formulate the trajectory planning task ofthe mainline facilitating vehicle as an optimal control problemwith both control and speed constraints. With regard to thespeed constraint, only a low speed constraint is considered,because the automated on-ramp merging strategy is mostlyneeded when the mainline traffic is at high density, underwhich situation a high speed constraint is not a limiting factor.The trajectory planning task of the on-ramp merging vehicleis formulated as an optimal control problem with only controlbounds. The Pontryagin Maximum Principle (PMP) is appliedto solve the optimal control problems. The solutions are thenimplemented in a recursive framework so as to accommodatethe constantly changing external disturbances.Clearly, a complete design of the automated on-rampmerging methodology includes additional considerations, butthe scope of this paper is limited to the formulation of theoptimal control problems, solution using the PMP, andimplementation in a recursive fashion to characterize theoptimal gap development and merging. It is envisioned thatthe outcomes of this study will form the basis for a completedesign of on-ramp merging methodology in the future. Theremainder of this paper is organized as follows. Section IIformulates the optimal control problems. Section III appliesAshish Bhaskar (e-mail: ashish.bhaskar@qut.edu.au) is with the SmartTransport Research Center, School of Civil Engineering and BuiltEnvironment, Science and Engineering Faculty, Australia.Edward Chung (edward.cs.chung@polyu.edu.hk) is with the Departmentof Electrical Engineering, Hong Kong Polytechnic University, Hong Kong,PR China.
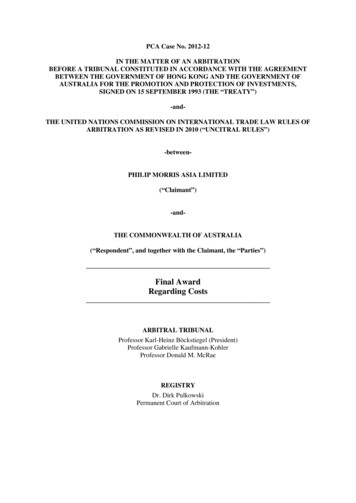
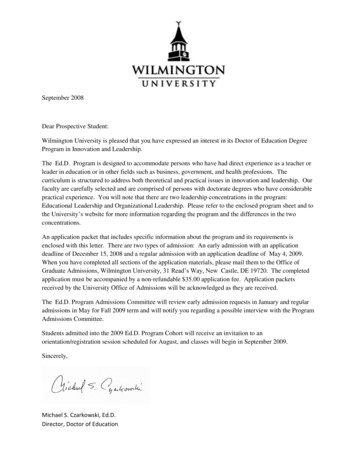
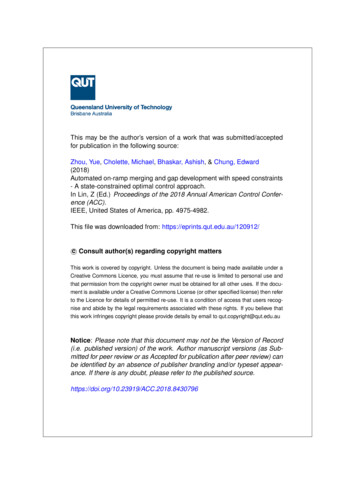
the PMP to solve the optimal control problems, and thenpresents a recursive implementation framework. Section IVconducts numerical analysis and present a numericalexample. Section V concludes the paper.this paper, we do not consider lateral movements of vehicles,as in [9, 10].II. FORMULATION OF OPTIMAL CONTROL PROBLEMSA. Overview of On-Ramp Merging ProcessTABLE INOTATION ��)𝑥0fac𝑣0fac𝑥0mer𝑣0merAcceleration trajectory (i.e. control history)Position trajectorySpeed trajectoryInitial position of the facilitating vehicleInitial speed of the facilitating vehicleInitial position of the merging vehicleInitial speed of the merging vehicleDesired merge-in speed of the mergingvehicleDesired merge locationSpeed trajectory of the leading vehiclePosition trajectory of the leading vehicleInitial position of the leading vehicleInitial speed of the leading vehicleControl terminal timeSpeed constraintMaximum decelerationMaximum accelerationPenalty weight on control terminal timePenalty weight on deviation from desiredmerge locationPenalty weight on deviation from desiredmerge speedVehicle lengthStandstill clearanceConstant time gap as in the car-following rule𝑣𝑡merf𝑥𝑀𝑣𝑙 (𝑡)𝑥𝑙 𝜆𝜆1𝜆2𝐿𝑠0𝜏Fig. 1. The on-ramp merging process: (a) the time when the process isinitiated; (b) a time in the middle of the process; (c) the time when the processis finished.The leading vehicle is an external disturbance and itstrajectory need to be predicted. In practice, this prediction isobviously not perfect. A common way of compensating forsuch uncertainty is to update the prediction andcorrespondingly re-solve the problem in recursive fashion.The on-ramp merging and gap development processconsidered in this paper can be illustrated by Fig. 1. Thedriving direction is from right to left. Fig. 1 (a) shows thecondition at the time when the merging process begins. Theshaded blue vehicle (with no flag) is the on-ramp mergingvehicle whose front bumper is currently at the predefined callfor-assistance (CFA) point and who sends out a request forassistance to mainline vehicles. It is assumed for simplicitythat communications are instantaneous. The flagged vehicleis the mainline vehicle who agrees to facilitate and whoinitiates the process of creating a suitable gap between itselfand the leading vehicle, i.e. the grey shaded vehicle. Fig. 1 (b)is a snapshot at some time in the middle of the mergingprocess. Note that at this time the gap is not yet suitable formerging. Fig. 1 (c) shows the condition when the mergingprocess terminates: The gap has satisfied certain conditionsand the on-ramp vehicle is ready to merge into the mainline.As soon as the merging vehicle merges into the gap, itswitches to car-following operation, so does the facilitatingvehicle. Obviously, the time and location where the aboveprocess terminates depends on the trajectory of the leadingvehicle and the conditions specifying the successfuldevelopment of a suitable gap, which are defined by terminalconditions of the optimal control problems presented later. In2B. Formulation of Optimal Control ProblemsThe notation used in this paper are summarized in Table I.The optimal control problem of the mainline facilitatingvehicle is given by (1) through (8).𝑡fmin 𝑢(𝑡)01[𝑢(𝑡)2 𝜆] 𝑑𝑡2(1)𝑥̇ (𝑡)𝑣(𝑡)] []𝑣̇ (𝑡)𝑢(𝑡)(2)subject to:𝐱̇ (𝑡) [𝑣(𝑡) 𝑣min(3)𝑎min 𝑢(𝑡) 𝑎max(4)with initial conditions:𝑥(0) 𝑥0fac(5)𝑣0fac(6)𝑣(0) with terminal state conditions:𝑥(𝑡f ) 𝑥𝑙 (𝑡f ) 2(𝐿 𝑠0 ) 2𝜏𝑣𝑙 (𝑡f )(7)𝑣(𝑡f ) 𝑣𝑙 (𝑡f )(8)
In the above, (1) through (8) describe a linear-quadraticoptimal control problem with a flexible terminal time andterminal states which move along a given curve as a knownfunction of the final time. The physical implication of theterminal conditions (7) and (8) is to render zero feedbackerrors in a constant time-gap car-following strategy [13-15]when the merging process is completed and the facilitatingand merging vehicles switch to car-following operations.The optimal control problem that governs the maneuver ofthe on-ramp merging vehicle is given as (9) through (15).Note that here the terminal time 𝑡f is fixed, as determined bythe optimal control problem of the facilitating vehicle andtransmitted to the merging vehicle via V2V communication.𝑡fmin 𝑢(𝑡)011𝑢(𝑡)2 𝑑𝑡 𝜆1 [𝑥(𝑡f ) 𝑥𝑀 ]22212 𝜆2 [𝑣(𝑡f ) 𝑣𝑡mer]f2𝑥̇ (𝑡)𝑣(𝑡)] []𝑣̇ (𝑡)𝑢(𝑡)𝑎min 𝑢(𝑡) 𝑎max(9)(10)(11)with initial conditions:𝑥0mer(12)𝑣(0) 𝑣0mer(13)𝑥(0) 1. Hamiltonian and LagrangianConsider the optimal control problem of the facilitatingvehicle as defined by (1) to (8). To apply the PMP, first covert(1) to be maximization of the cost function.𝑡f1max [𝑢(𝑡)2 𝜆] 𝑑𝑡𝑢(𝑡) 02(16)Form the Hamiltonian:subject to:𝐱(𝑡) [first two cases, especially when pure state constraints arepresent, as in our problem. Difficulties often lie in the socalled jump conditions [16] that must be satisfied for pointswhere the extremal state trajectories make a contact with thestate constraining arcs. In this paper we use a maximumprinciple with state constraints proposed by [16].11ℋ 𝑢(𝑡)2 𝜆 𝑝1 (𝑡)𝑣(𝑡) 𝑝2 (𝑡)𝑢(𝑡)22In the above, 𝑝1 (𝑡) and 𝑝2 (𝑡) are the co-state variablesassociated with the state variables 𝑥(𝑡) and 𝑣(𝑡), respectively.To maximize the Hamiltonian over the constrained controldomain and constrained state space, we adjoin the controlconstraints (4) and the state constraint (3) to the Hamiltonian(17) to form the Lagrangian:11ℒ 𝑢(𝑡)2 𝜆 𝑝1 (𝑡)𝑣(𝑡) 𝑝2 (𝑡)𝑢(𝑡)22 𝜌1 (𝑡)[𝑢(𝑡) 𝑎min ] 𝜌2 (𝑡)[ 𝑢(𝑡) 𝑎max ] 𝜇(𝑡)[𝑣(𝑡) 𝑣min ](18)𝜌1 (𝑡)[𝑢(𝑡) 𝑎min ] 0𝜌2 (𝑡)[ 𝑢(𝑡) 𝑎max ] 0𝜇(𝑡)[𝑣(𝑡) 𝑣min ] 0𝜌1 (𝑡), 𝜌2 (𝑡), 𝜇(𝑡) 0(19)(20)(21)(22)and desired terminal state:𝑥𝑀 𝑥𝑙 (𝑡f ) (𝐿 𝑠0 ) 𝜏𝑣𝑙 (𝑡f )(14)𝑣𝑡mer 𝑣𝑙 (𝑡f )f(15)III. ANALYTICAL SOLUTION AND A RECURSIVEIMPLEMENTATION FRAMEWORKA. Solution Using Pontryagin Maximum Principle withState ConstraintsIn this section we apply the PMP to solve the optimalcontrol problem of the facilitating vehicle. Solution of theoptimal control problem of the merging vehicle iscomparatively straightforward, and thus is not presented dueto space limitations. Because of the existence of the stateconstraint (3), a maximum principle with state constraintsmust be used. As is well-known, when there are neithercontrol constraints nor state constraints, the maximumprinciple reduces to ℋ𝒖 𝟎, i.e. the first-order partialderivatives of the Hamiltonian with respect to controls vanish.When there exist control constraints but no state constraints,t
Zhou, Yue,Cholette, Michael,Bhaskar, Ashish, &Chung, Edward (2018) Automated on-ramp merging and gap development with speed constraints - A state-constrained optimal control approach. In Lin, Z (Ed.) Proceedings of the 2018 Annual American Control Confer-ence (ACC). IEEE, United States of