Transcription
Modelado y control del pénduloinvertido sobre carro mediantesistemas híbridos.Fernando Bote Ortega
Modelado y control del péndulo invertidosobre carro mediante sistemas híbridos. Autor: Fernando Bote OrtegaÍndice1. Objetivos . 82. Introducción . 92.1. Sistema hardware . 92.1.1. Motor lineal.9.12.132.1.3.1.Motor lineal .142.1.3.2.Armario y panel de control .152.1.3.3.Potenciómetro .162.1.3.4.Péndulo invertido .162.1.2. Péndulo invertido2.1.3. Instalación2.2. Software y conexión . 172.3. Sistemas híbridos . 202.3.1. Introducción.212.3.2. Diferentes enfoques en el modelado yanálisis de sistemas híbridos.223. Modelado . 273.1. Introducción . 273.2. Variables continuas y discretas . 272
Modelado y control del péndulo invertidosobre carro mediante sistemas híbridos. Autor: Fernando Bote Ortega3.3. Modelado de la parte continua . 283.3.1. Modelo del carro.293.3.2. Modelo no lineal.37.42.523.3.3. Modelo de los rebotes3.3.4. Modelo linealizado3.4. Modelado de la parte discreta . 553.5. Integración de las variables continuasy discretas .564. Control . 574.1. Estrategia global de control híbrido .574.2. Alzamiento del péndulo .58.58.644.3. Equilibrio del péndulo .73.734.3.1.1.Principio de optimalidad .744.3.1.2.Nota histórica .764.3.1.3.Control LQ discreto .774.3.1.4.Transición [N – 1] [N] .774.3.1.5.Transición [N –2] [N] .794.3.1.6.Transición [k] [N] .804.3.1.7.Control LQ en tiempo continuo .834.3.1.8.Control LQ de Horizonte Infinito .854.3.1.9.Estimadores óptimos .884.2.1. Impulso inicial4.2.2. Control de alzamiento4.3.1. Introducción3
Modelado y control del péndulo invertidosobre carro mediante sistemas híbridos. Autor: Fernando Bote Ortega4.3.1.10.Modelos de sistemas con ruidos .884.3.1.11.Filtro de Kalman discreto .904.3.1.12.Notas .994.3.2. Implementación del control LQG.1034.3.2.1.Diseño de control LQR .1034.3.2.2.Diseño del filtro de Kalman .1085. Resultados . 1135.1. Simulación del modelo global .1135.2. Ejecución en laboratorio del modelo global .1186. Conclusiones y posibles extensiones .123ANEXO 1 .125Bibliografía .1314
Modelado y control del péndulo invertidosobre carro mediante sistemas híbridos. Autor: Fernando Bote OrtegaÍndice figuras.Figura 2.1 Representación de un motor lineal. 10Figura 2.2 Motor lineal con plataforma móvil. 15Figura 2.3 Armario y panel de control. 15Figura 2.4 Péndulo invertido. 16Figura 2.5 Pantalla ControlDesk. 18Figura 2.6 Diagrama de conexionado del motor lineal. 20Figura 3.1 Modelo usado en función del ángulo del péndulo. 28Figura 3.2 Diagrama simulink para accionamiento del motor lineal. 29Figura 3.3 Bloque Simulink del motor lineal. 30Figura 3.4 Respuesta real del motor a un escalón. 32Figura 3.5 Diagrama de estados del carro. 34Figura 3.6 Modelo Simulink del carro. 36Figura 3.7 Respuesta simulada del carro ante un escalón u 0.3. 36Figura 3.8 Diagrama de fuerzas que actúan en el sistema. 37Figura 3.9 Varilla con eje perpendicular por el centro. 38Figura 3.10 Varilla con eje perpendicular por uno de sus extremos. 39Figura 3.11 Diagrama de masas con respecto a un eje. 39Figura 3.12 Valor del péndulo apoyado sobre la izquierda. 43Figura 3.13 Valor del péndulo apoyado sobre la derecha. 43Figura 3.14 Caída libre del péndulo hacia la izquierda. 45Figura 3.15 Caída libre del péndulo hacia la derecha. 45Figura 3.16 Zona de rebotes de la izquierda. 46Figura 3.17 Modelo simulink del péndulo. 49Figura 3.18 Simulación de caída libre del péndulo hacia la izquierda. 50Figura 3.19 Simulación de la zona de rebotes izquierda. 50Figura 3.20 Simulación normalizada. 51Figura 3.21 Modelo del autómata híbrido del péndulo. 56Figura 4.1 Péndulo girando. 59Figura 4.2 Modelo Simulink de impulso inicial. 61Figura 4.3 Impulso inicial de entrada. 62Figura 4.4 Respuesta del sistema al impulso inicial. 625
Modelado y control del péndulo invertidosobre carro mediante sistemas híbridos. Autor: Fernando Bote OrtegaFigura 4.5 Variación de la velocidad del carro ante el impulso inicial. 63Figura 4.6 Variación del ángulo del péndulo ante el impulso inicial. 64Figura 4.7 Modelo Simulink del controlador de alzamiento. 66Figura 4.8 Modelo Simulink del comparador de entradas. 67Figura 4.9 Ángulo para K 0.1. 67Figura 4.10 Ángulo para K 0.2. 68Figura 4.11 Ángulo para K 0.3. 68Figura 4.12 Ángulo para K 0.4. 69Figura 4.13 Modelo del controlador de alzamiento para el laboratorio. 69Figura 4.14 Señal del ángulo con ruido. 70Figura 4.15 Bloque compara ángulo. 71Figura 4.16 Respuesta real alzamiento para K 0.3. 72Figura 4.17 Respuesta real alzamiento para K 0.4. 72Figura 4.18 Posibles trayectorias de 1 a 8. 75Figura 4.19 Evolución del estado en lazo cerrado. 82Figura 4.20 Evolución de las ganancias. 83Figura 4.21 Evolución de los estados del sistema y los estimados. 99Figura 4.22 Modelo Simulink del controlador LQG. 103Figura 4.23 Bloque cálculo de velocidad angular. 105Figura 4.24 Velocidad angular para Impulso 10 y K 5. 105Figura 4.25 x5 para v 1 m/s. 106Figura 4.26 Esquema control LQR. 107Figura 4.27 Resultado simulación control LQR. 107Figura 4.28 Diagrama de bloques del filtro de Kalman. 108Figura 4.29 Medida del ruido de la señal de posición. 109Figura 4.30 Medida del ruido de la señal de velocidad. 110Figura 4.31 Medida del ruido de la señal de ángulo. 110Figura 4.32 Esquema de control LQG. 111Figura 4.33 Esquema Simulink del filtro de Kalman. 111Figura 4.34 Resultado simulación del control LQG. 112Figura 5.1 Modelo global de simulación. 113Figura 5.2 Diagrama Simulink del filtro de Kalman. 114Figura 5.3 Diagrama Simulink del bloque condiciones de cambio. 115Figura 5.4 Diagrama Simulink para calcular el estado x5. 1166
Modelado y control del péndulo invertidosobre carro mediante sistemas híbridos. Autor: Fernando Bote OrtegaFigura 5.5 Resultado de la simulación global. 117Figura 5.6 Simulación de la señal de ángulo. 118Figura 5.7 Modelo global para el laboratorio. 119Figura 5.8 Resultado fallido de ejecución del modelo global. 120Figura 5.9 Resultado de ejecución del modelo global para K 0.4. 121Figura 5.10 Resultado de ejecución del modelo global para K 0.3. 1227
Modelado y control del péndulo invertidosobre carro mediante sistemas híbridos. Autor: Fernando Bote Ortega1. Objetivos.El objetivo del este proyecto es realizar un estudio del péndulo invertido sobrevehículo móvil que se encuentra implementado en los laboratorios de automática de laEscuela Superior de Ingenieros de Sevilla empleando un modelo de sistema híbrido quemodele su comportamiento .Dicho estudio consistirá en una primera parte en la que se realice un modeladomatemático del sistema en cuestión, obteniendo las ecuaciones que lo describen yrealizando un modelo del mismo a partir de ellas, de forma que las variables teóricasque se manejen tengan correspondencia con las variables que se emplearán en el modelofísico.En la segunda parte se realizará el diseñó de una estrategia de control usando laherramienta Simulink de Matlab de tal forma que actuando sobre el carrito consigamosen un primer momento el alzamiento del péndulo partiendo de un estado de reposo yposteriormente mantener la verticalidad del mismo.8
Modelado y control del péndulo invertidosobre carro mediante sistemas híbridos. Autor: Fernando Bote Ortega2. Introducción.2.1. Sistema hardware.2.1.1. Motor Lineal.Los motores eléctricos más comunes son motores rotatorios, es decir, quegeneran el movimiento a lo largo de un eje. Cuando es requerido un motor de tipo linealson necesarios sistemas que trasformen el movimiento rotatorio en lineal. Estossistemas de transmisión del motor son generalmente compuestos de engranajes ycorreas siempre sometidos a roces que causan perdidas de la potencia generada.En un motor lineal se implementa el motor a lo largo de una dirección sin quenecesite ningún mecanismo de transmisión, esto conlleva una menor dispersión de lapotencia generada. Un ejemplo, una de las áreas en las que ha encontrado aplicación eluso de motores lineales es en el transporte con monorraíl. En este tipo de transporte seha podido combinar la aplicación de propulsión mediante motores lineales con sistemasmagnéticos de levitación, debido al hecho de que tales motores no necesitan transferir alsuelo la potencia producida. El resultado es una fuerte disminución de las pérdidas porroces y por eso un alto rendimiento.A pesar de que el desarrollo de los primeros motores lineales se remonta alúltimo decenio del 1800, tales motores no han suscitado sustanciales intereses prácticosantes del 1950. Hoy en día son siempre más empleados en campos de aplicación en losque sean requeridos movimientos lineales de alta precisión de desplazamiento yvelocidad. Algunos de estos son las máquinas de desplazamiento, maquinas textiles,puertas corredizas, sistemas ópticos, transporte monorraíl, etc.Los motores lineales presentan ventajas y límites. Las principales ventajas son: Alta velocidad y precisión. El límite a la máxima velocidad depende delcableado y del control electrónico. Respuesta rápida, gracias a la ausencia de transmisiones mecánicas. Fiabilidad.9
Modelado y control del péndulo invertidosobre carro mediante sistemas híbridos. Autor: Fernando Bote Ortega Vida larga. Escasa necesidad de manutención. Robusteza. Extensión ilimitada. Con algunas configuraciones puede resultar bastante simplela ampliación del recorrido del motor, pudiendo llegar a distancias grandes comolas de las monorraíles.Los límites son: La fuerza de atracción entre las dos partes del motor puede ser de 2 a 5 vecesmás grande que la fuerza horizontal de propulsión. La temperatura del motor conlleva limitaciones al rendimiento. El hierro que en algunos casos forma el núcleo alrededor del que son envueltaslas bobinas genera atracción, en caso de utilización con imanes, también si elmotor no está en funcionamiento.Ilustramos brevemente los principios operativos de los motores lineales. Lafísica que está a la base es simple, se disfruta de la atracción entre polos magnéticosiguales y la repulsiones entre polos diferentes. Este tipo de motores disfruta de losmismos principios que los motores eléctricos rotatorios al punto que se puede ver unmotor lineal como uno rotatorio que haya sido abierto a lo largo de una generatriz yextendido encima de un piano, como se ilustra en la figura.Figura 2.1: Representación de un motor lineal.10
Modelado y control del péndulo invertidosobre carro mediante sistemas híbridos. Autor: Fernando Bote OrtegaLos motores lineales son compuestos por dos partes que toman el nombre deprimario y secundario. El primario consta de un conjunto de bobinas de cobre a las quese aplica una corriente para crear una fuerza electromagnética. Número y extensión delas espiras determinan la fuerza del motor. El secundario es el componente quereacciona a la fuerza electromotriz y consiste solamente en una serie de imanespermanentes. Tanto el primario como el secundario pueden ser el elemento estacionarioo móvil.Cuando una corriente pasa por una bobina crea un campo magnético entre lasdos partes del motor. Como resultado los imanes generan una fuerza sobre el conjuntode bobinas y alternando oportunamente la corriente causan el moto lineal de la partemóvil del motor. En la práctica a través del control de la corriente que circula en lasespiras, es decir del campo electromagnético, se puede obtener el motor lineal continuodeseado.Existen varios tipos de motores lineales: Según la forma:¾ Llano: la parte estática es un llano sobre el que se desliza lamóvil.¾ Tubular: la parte móvil se desliza sobre un núcleo central que laatraviesa. Este tipo de motores aprovechan óptimamente el flujomagnético pero presenta límites debidos a la necesidad de puntosde apoyo en los extremos.¾ En U: la parte móvil pasa entre dos filas de imanes. Uno de losinconvenientes de los motores lineales a imanes permanentes esel fuerte campo magnético presente alrededor del motor, sobretodo por motores llanos y tubulares con secundario en la partefija. Para la configuración en U el inconveniente se reducenotablemente.11
Modelado y control del péndulo invertidosobre carro mediante sistemas híbridos. Autor: Fernando Bote Ortega Con primario móvil o secundario móvil. En alternada síncrono o en alternada a inducción. Paso a paso. En continua con escobillas o sin escobillas.Por último, otra cosa importante a tener en cuenta es el calor que se genera porefecto Joule en las bobinas y que puede causar desde pérdidas de rendimiento a dañosirreparables, por eso muchas veces el implante necesita un sistema de refrigeración.2.1.2. Péndulo Invertido.Este sistema constituye un caso concreto de sistema físico en el que se ponen demanifiesto importantes problemas, lo que ha hecho de él un banco de pruebas(benchmark) para sistemas de control.El interés en el estudio de este tipo de sistema radica en que, salvando lasparticularidades de cada caso, su modelo matemático presenta una formulación basadaen ecuaciones diferenciales, que guarda cierta analogía con procesos reales de mayorcomplejidad, como por ejemplo: el generador sincrónico conectado a un bus infinito yel sistema de control de vuelo para aeronaves. Por tanto, su estudio sirve como unaprimera aproximación a los problemas que plantean sistemas de mayor complejidad.El control del péndulo invertido presenta una enorme variedad de problemas quehan hecho de él uno de los sistemas concretos para el ensayo de leyes de control másanalizados en estos últimos tiempos. Los primeros péndulos invertidos se construyeronen los años 70, y aún hoy, treinta años después, se sigue experimentando con el pénduloinvertido y tratando de analizarlo desde un punto de vista teórico. Es notable quedespués de tantos años aún no se haya conseguido un estudio unitario y satisfactorio dedicho problema.En el control del péndulo invertido se presentan básicamente dos problemas: elproblema de la estabilidad local en torno a la posición de equilibrio, que es análogo al12
Modelado y control del péndulo invertidosobre carro mediante sistemas híbridos. Autor: Fernando Bote Ortegaproblema del malabarista que pretende mantener un palo en la punta de un dedo; y elproblema de levantar el péndulo desde su posición de reposo hasta la posición en la quese mantiene erguido hacia arriba. Este último problema se conoce con su denominacióninglesa de problema del swing up.El primero de los problemas, el de la estabilización local, puede resolversesatisfactoriamente mediante la linealización en torno a la posición de equilibrio. Sinembargo, la ley de control así obtenida tiene un carácter exclusivamente local. Paraperturbaciones de una cierta magnitud el control del péndulo se pierde.En el problema del swing up es necesario considerar todo el espacio de estados,de modo que el problema no puede abordarse con una perspectiva local. Se trata, portanto, de un problema al que se aplican las consideraciones realizadas a lo largo de estecapítulo, relativas a la imposibilidad de linealizar el sistema y de tratarloexclusivamente en forma local. El problema del swing up es, por su propia naturaleza,un problema no lineal que se desenvuelve en una amplia región del espacio y que, portanto, no admite una reducción local y hay que abordarlo con toda la problemáticainherente a su globalidad y a su no linealidad.Por último, para terminar esta sección sobre el problema de control del pénduloinvertido, conviene resaltar que se puede considerar como un problema arquetipo de loque es la ingeniería. No existe un método universal para resolverlo, y ante él elingeniero tiene que desarrollar sus facultades imaginativas y creativas, combinandodiferentes métodos para resolver los distintos aspectos del complejo problema querepresenta el control de este sistema, aparentemente simple, pero en realidad muycomplejo en sus formas de comportamiento.2.1.3. Instalación.La instalación sobre la que ha sido aplicado el control, presente en la planta bajadel Instituto da Automática y Robótica (IAR) de la Escuela Superior de Ingenieros deSevilla, consta de los siguientes elementos:13
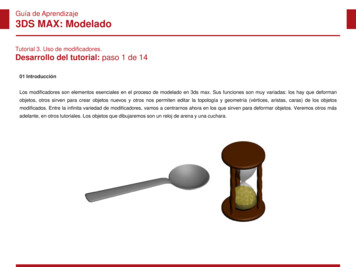
Modelado y control del péndulo invertidosobre carro mediante sistemas híbridos. Autor: Fernando Bote Ortega Motor lineal 1FN3 Siemens. Sistema óptico de medida lineal LC181 Heidenhein. Guías de rodamiento. Péndulo invertido. Potenciómetro VISHAY. Armario y panel de control. PC con tarjeta dSpace.2.1.3.1. Motor Lineal.El motor 1FN3 050-2W00-0AA de Siemens es un motor lineal síncrono aimanes permanentes que puede alcanzar la velocidad de 373 m/min.El primario es la parte móvil, es decir que en su interior se hallan las bobinas quegeneran el campo electromagnético. Su dimensiones son 254*67*47.7 mm.El secundario es compuesto da 21 imanes con 4 pares de polos cada uno de losque mide 120*58*11.8 mm. La extensión total del secundario resulta ser 2520 mm.Entre primario y secundario está presente un entrehierro de 1.3 mm.Las guías LAS20ALZ de NSK-RPH miden 2985 mm.La cabeza captadora del sistema de medida LC181 está fija en la parte móvil yimpone un limite de 120 m/min porque sea garantizado un correcto funcionamiento.A continuación se muestra una fotografía del montaje que se encuentra en loslaboratorios. En el todavía no se ha montado la estructura de péndulo invertido que semostrará más adelante.14
Modelado y control del péndulo invertidosobre carro mediante sistemas híbridos. Autor: Fernando Bote OrtegaFigura 2.2: Motor lineal con plataforma móvil que se encuentraen los laboratorios de automática de la Escuela de Ingenieros.2.1.3.2. Armario y panel de control.El armario y panel de control contiene las protecciones, la distribución depotencia, el cableado y los pulsadores. Además se encuentra aquí la unidad deregulación SimoDrive 611 Universal de Siemens.Figura 2.3: Armario y panel de control.15
Modelado y control del péndulo invertidosobre carro mediante sistemas híbridos. Autor: Fernando Bote OrtegaEsa unidad es una tarjeta que funciona de interfaz directa con el motor ademásque de unidad de regulación. Presenta bornes para el acceso directo a salidas y entradasdigitales y analógicas. La tarjeta está conectada por un lado al módulo que proporcionala potencia al motor y al captador del sistema de medida, por el otro al PC. Lasconexiones con el PC son una directa a la puerta serie de ése a través del bus RS-232 yla otra a través de los bornes con la tarjeta dSpace que se halla en el PC. Veremos esteaspecto más detalladamente luego.2.1.3.3. Potenciómetro.El potenciómetro VISHAY Spectrol 157-9002-103 OI nos ofrece una medidadel ángulo del péndulo. Posteriormente esa señal eléctrica la convertiremos mediante unbloque de Simulink en una señal que irá desde pi/6 a -pi/6 que son los ángulos máximoy mínimo respectivamente que puede alcanzar el péndulo invertido.2.1.3.4. Péndulo invertido.El péndulo invertido se coloca sobre la plataforma móvil fijándolo mediantetornillos.40mm10mmFigura 2.4: Péndulo invertido.16
Modelado y control del péndulo invertidosobre carro mediante sistemas híbridos. Autor: Fernando Bote OrtegaComo ya se ha dicho arriba el péndulo tiene como ángulo máximo y mínimorespectivamente pi/6 y –pi/6 con respecto a su vertical ya que tiene unos topes queimpiden que pueda inclinarse más.2.2. Software y conexión.El módulo SimoCom 611 Universal proporciona la interfaz directa al motorademás de funcionar como unidad de regulación. Esta tarjeta puede operar tanto comoregulador de posición como de velocidad, tiene un módulo de memoria no volátilFEPROM para almacenar el firmware (software del sistema) y los datos del usuario.Para acceder a la SimoCom 611 Universal como unidad de regulación se empleaun software de la Siemens SimoComU que comunica con la tarjeta a través del busserial RS-232. Con SimoComU se pueden especificar los parámetros del motorcontrolado, actualizar los parámetros internos del regulador, definir una secuencia dedesplazamiento y poner en marcha el seguimiento, hacer un diagnosis del sistema,parametrizar las salidas y las entradas digitales y analógicas de la tarjeta, administrar lasalarmas, etc .Además se puede cargar la configuración corriente en la FEPROM. A través deSimoComU no se puede, sin embargo, controlar en tiempo real el sistema. Los dos tiposde control pueden ser planteados y aplicados, pero no se puede obrar sobre ellos durantesu ejecución. Puede además ser empleado para desplazar el motor manualmente desdePC.Por lo que concierne el presente proyecto ese software ha sido útil para ladefinición de las puertas de entrada y salida directas, de los parámetros de final decarrera software y para la gestión de las alarmas que, una vez que se activan, inhiben elfuncionamiento del motor. Tales acciones no pueden ser efectuadas a través del moduloque permite la aplicación del control, esto es, el dSpace.17
Modelado y control del péndulo invertidosobre carro mediante sistemas híbridos. Autor: Fernando Bote OrtegaLa dSpace DS1103 PPC es una tarjeta colocada en el PC. Está basada en elprocesador PowerPC 604e a 400 MHz y puede ser programada vía Simulink con lapropia librería a bloques RTI (Real-Time Interface).El software que acompaña la dSpace, además de proporcionar la instalación delos bloques Simulink de interfaz, permite diseñar paneles de control en manera simple yintuitiva.Veamos ahora el panel empleado:Figura 2.5: Pantalla del ControlDesk desde la que podemos variar los parámetrosde control.Tenemos un botón de habilitación del control (On/Off), input numéricos para laplantear los valores de amplitud y frecuencia de la señal de colocación y de amplitudpara la ganancia del controlador de alzamiento. Hay además tres plotter:1. Para la visualización en tiempo real de la velocidad y posición del carrito.2. Para la visualización en tiempo real de la velocidad angular y ángulo delpéndulo.18
Modelado y control del péndulo invertidosobre carro mediante sistemas híbridos. Autor: Fernando Bote Ortega3. Para la visualización en tiempo real de la señal de control.Una vez realizado, compilado y cargado en la CPU el modelo Simulink deinterfaz o control del motor, se puede usar el panel para modificar valores del modelo yvisualizar las señales en lectura desde el motor; todo en tiempo real. Particularidadessobre como se ha aplicado el control, como el modelo Simulink a través del dSpaceserán presentadas más adelante.Ilustramos brevemente para terminar este apartado, las conexiones entre latarjeta dSpace y SimoCom 611 Universal. En el panel de control hay conexiones a laSimoCom 611. Las señales necesarias en nuestro caso son las 4 descritas después más latierra y una referencia por la salida del motor y han sido parametrizadas medianteSimoComU. Como nota, la tarjeta dSpace dispone de seis conectores con 50 pines cadauno: P1A y P1B analógicos, P2A y P2B digitales, P3A y P3B diferenciales.Veamos las conexiones: La señal que llega al bloque convertidor analógico-digital DS1103ADC C18 esanalógica y es la lectura de la velocidad real del motor. La conexión es entre elborne SimoCom 611 Salidas Analógicas X441 16.A y el pin P1A 23(convertidor analógico-digital canal 18). Además se ha conectado el borne dereferencia X441 15 al pin P1A 24 (tierra). Las dos señales digitales en entrada al motor llegan al bloque SimulinkDS1103BIT OUT G0, en particular a los bits 5 y 7. Estos bits son relativos aP2A pin 19 y P2A pin 3, además la tierra es aquella de P2A pin 1. En este casopero las señales han valores de 0 V (bajo) y 4,6 V (alto), mientras en entrada a laSimoCom 611 el nivel bajo tiene que ser entre -3 y 5 V y el nivel alto entre 15 y30 V. Por eso es necesario amplificar las señales TTL en llagada desde ladSpace; se emplea una tarjeta compuesta por dos negadores y un Darlingtonalimentada con 24 V. Las señales en salida son amplificadas a los valores altosde 16.5 V y entonces conexos a la SimoCom 611. En particular a los bornes delModulo Opcional de Bornes X422 identificados con I8 y I9 y la tierra en salidade la tarjeta a la tierra de la SimoCom 611.19
Modelado y control del péndulo invertidosobre carro mediante sistemas híbridos. Autor: Fernando Bote Ortega Para terminar la señal en salida del bloque DS1103DAC C6 tiene un rango de /- 10 V (en realidad se utiliza sólo entre 0 y 10 V) y se halla en el conector P1Apin 10 (convertidor digital-analógico canal 6). Esto es conectado al primer de losbornes libre que se hallan en bajo en el panel. En realidad tal convertidoramplifica por 10 la señal que llega de Simulink; por ejemplo si la señal en elmodelo es de 0.2, en el pin (y por eso también en entrada a la SimoCom 611)hará 2 V.Mostramos
Ilustramos brevemente los principios operativos de los motores lineales. La física que está a la base es simple, se disfruta de la atracción entre polos magnéticos iguales y la repulsiones entre polos diferentes. Este tipo de motores disfruta de los mismos principios que los motores eléctricos rotatorios al punto que se puede ver un