Transcription
CDOT’s Autonomous Truck Mounted Attenuator (ATMA)ProgramTransportation Research Board,June 14, 2022
Agenda Program Overview and Goals Deployment in Colorado Autonomous Maintenance Technology(AMT) Pool Fund - TPF 5(380) AMT Deployment Toolkit Questions/Discussion2
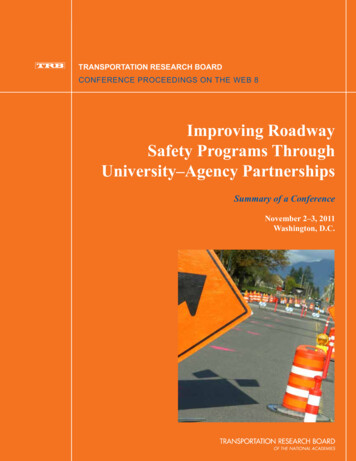
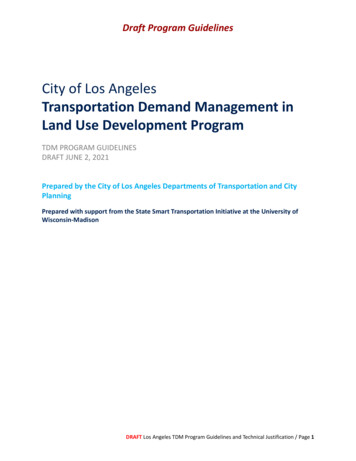
Program Goals: What is a truck mounted attenuator and why does a DOTuse it? Remove driver from the maintenancetruck Decrease risk of operations Increase efficiency of operations Pursue cutting-edge technology toimprove highway managementPaint stripingvehicle (movingvery slowly – 7 -10mph on thehighwayTMA to protectthe workers in theback of the painttruck3
CDOT ATMA Goals and TimelineCDOT Program Goals1. Installation2. Evaluation3. Operational4. Versatility5. Statewide expansionSummer2020Spring2021Purchase Validationof 2ndof 2ndATMAATMA4
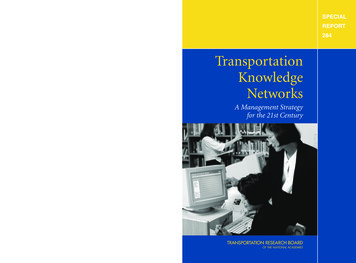
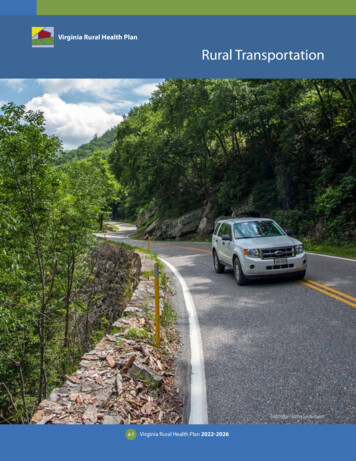
System OverviewAIPV / FOLLOWER e-CRUMBSLEADERThe ATMA retrofit autonomous kit converts Impact Protection Vehicle into ATMA Leader /Follower system ATMA system increases worker safety by eliminating the need for a human driver in the attenuator During operations, the ATMA follows the path of the Leader vehicle (paint striping vehicle, sweepervehicle, etc.) while maintaining a user-defined safe distance Leader vehicle and ATMA maintain constant communications with each other over multiple Vehicleto-Vehicle (V2V) communication links Safety – Redundancy, cameras, navigation, A-Stop, E-Stop, Independent E-Stop, and Human in theLoop
What do we do to get one of these on road? . After procurement and installation, the funbegins! CDOT led validation/acceptance test(closed course).6
2021 Validation Test ReportExample test result: Emergency Stop7
2018 Example test result: Gap control – HumanDriver vs Automated System Straight line following for 4000’ with desired speed 7 mph (striping operation speed) anddesired gap 60mRecorded gap is measured antenna to antenna: 60m bumper to bumper is 68.89m antennato antenna8
Operational DeploymentCDOT ATMAs approvedfor operations on Blue,Purple, and Greyroadways. 27 state highways41 roadway segments9
Annual Operator Training10
Developing a community of practice –Autonomous Maintenance Technology Pool FundAutonomous Maintenance Technology Pool Fund TPF-5(380)“To develop and deploy ATMA or AIPVs to protect highwayworkers lives by enhancing cooperative inter-agency researchthat improves the safety and effectiveness of ATMA or AIPVoperations, and to facilitate communication betweentransportation agencies that encounter challenges withCheck out our Google ed-fund/home implementation.”11
Research efforts sponsored by theAMT Pool Fund1.2.3.4.5.5380-19-02: Evaluating the Human-AutomatedMaintenance Vehicle for Improved Safety andFacilitating Long Term Trust,Dr. Erika Miller, Colorado State UniversityEvaluating Human-Automated Maintenance Vehicle forImproved Safety Summary Findings (5380-19-02)5380-19-03: Development of ATMA/AIPVDeployment Guidelines,Dr. XB Hu, Missouri Science and Technology5380-20-04: ATMA Tabletop,All Clear Emergency Management Group5380-20-05: ATMA Tabletop, Cyber SecurityComplement,Dr. Jeremy Daily, Colorado State University5380-20-06: ATMA Documentation,Dr. XB Hu, Missouri Science and TechnologyATMA Tabletop Exercise tosimulate and facilitate whatwould happen if a crashoccurred: Standard operatingprocedures and practicesfollowing a crash Data to secure from thevehicle12 Preparation for if an
ATMA Toolkit - Developed by Members of the Toolkit- PreviewATMA Toolkit13
Colorado Lessons LearnedProgram Initiation Interdisciplinary approach (Multiple divisions involved) Lead Sponsoring Division Procurement challenges (rates, service agreement, lack ofcomparable data) Lack of comparable data importance of compilingquotes/contracts in toolkitProgram Start Up and Operations Importance of having a crew level member level champion Technology challenges will present themselves given theinnovative nature of the technology (i.e. GPS card issue,follow up issues) COVID restrictions delayed start and delayed identificationof technology challenges Solution still use the ATMA with operator behind wheel Season start up training14
Thank you!Tyler Weldon, State Maintenance Engineer, Division of Maintenanceand Operations, tyler.weldon@state.co.usAshley Nylen, Assistant Director of Mobility Technology,ashley.nylen@state.co.us15
Autonomous Truck Mounted Attenuator (ATMA)Using Driverless Technology to Increase Work Zone SafetyThe ATMA drastically increases thesafety of roadway maintenancestaff by eliminating one of themost dangerous assignments inthe work zoneUnmanned Systems DivisionMaynard FactorPH: (850) 461-4457Email: maynard.factor@kratosdefense.com
Kratos Corporate OverviewKratos Defense & Security Solutions, Inc. (Nasdaq: KTOS) develops and fields transformative, affordablesystems, platforms, and products for national security needs.Primary focus areas are unmanned systems, satellite communications, cyber security / warfare, microwaveelectronics, missile defense, training, and combat systems for a diverse range of platforms and programs13NASDAQ:KTOS
Kratos Unmanned Systems DivisionKratos Unmanned Systems Division is developer of leading-edgenear-term solutions to improve operational effectiveness andsignificantly increase safety.A global leader in the design, development, and manufacturing of unmannedsystem solutions that provide tactical competitive advantage for air and surfacebattlefield dominance. Unmanned system solutions include; Tactical Unmanned Aerial Vehicles – Valkyrie, MAKO/UTAP-22, Gremlins Aerial Target Drones – BQM-167, BQM-177, BQM-178 (Firejet) Training/Tactical Unmanned Ground Vehicles – HMMWV, T-72 Tanks,Resupply Vehicles, cars/trucks/SUVs/ATVs13NASDAQ:KTOS
What is a TMARoadway work zones are complex environments withpotential conflict points existing between traveling vehicles,vulnerable workers, and slow-moving heavy equipment.A Truck Mounted Attenuator (TMA) is a human-drivenmobile crash barrier that is used to follow behind a highwaymaintenance operations, shielding workers and equipmentahead from errant drivers entering the work zone.2TMA’s are Operated in all 50 statesDeployed daily / nightlySupport mobile maintenance operations: Line Painting Crack Sealing Falling Weight Deflectometry Sweeping Weed Spraying GPS Surveying Patching Roadway Clean-up Specialty ApplicationsNASDAQ:KTOS
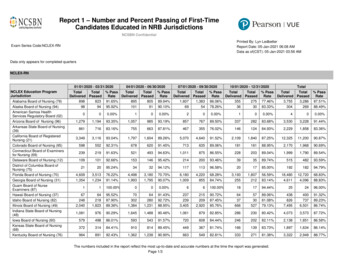
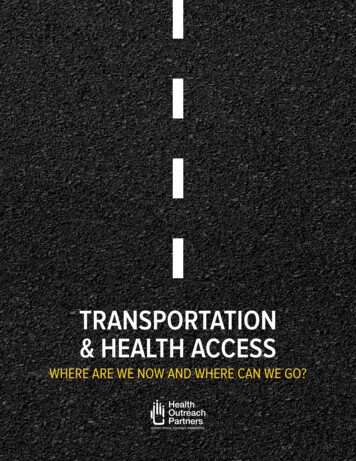
Why AutomateDriving a TMA is recognized as one of the mostdangerous assignments in the work zone. Across the US there are over 90 crash-relatedinjuries and 11 fatalities every week in the workzone (ref: Federal Highway Administration)THE ATMA REMOVES THE DRIVER FROM A “HIGH RISK”SITUATIONTMAAmbulances TMA drivers are at significant risk of lifelonginjury, painful rehabilitation, and even death Impact vehicles can be 80,000 lb. tractor-trailerstraveling at 65 mphImpact Vehicle*Tractor-trailer impact of a Virginia Department of Transportation (VDOT) TMA3NASDAQ:KTOS
Crash StatisticsKratos Defense has made a push for the ATMA innovation as a result of a number of brutal nationalstatistics.*crash highlights value of ATMA 32,719 - # of motor vehicle fatalities from 2012-2013 *Fars Annual Report 92,626 - # of crashes in work zones in 2015*US DOT FHA Facts & Statistics441% - of crashes were rear-end collisions in work zones*”Identification of Work Zone Crash Characteristics” 90% - of traffic crashes in Florida are due to human error*2015 FL Department of TransportationNASDAQ:KTOS
TMA Driver TestimonyAn actual TMA Truck survivor providing testimony about the benefits of the Autonomous TMA“This is going to save lives. This is going to prevent any of us to have to come back here and talk about how we almost died and how wecould have not seen our kids”Legislation passed the Senate and House unanimously and is now law in PA (ACT 117)5NASDAQ:KTOS
The TechnologyKey FeaturesThe Autonomous Truck Mounted Attenuator (ATMA) is aCAV solution that removes the human from the mostdangerous assignment in mobile highway operations. Driver and Driverless Modes– system easily switches from amanned operation to an unmanned operationsSystem Redundancy – reduces possibility of single point failuresCybersecurity Precautions – prevents malicious hackingAdvanced Active Safety System – automated E-Stop capabilitiesEnhanced Obstacle Detection – front and side view protectionsUser Controls – user adjustable gap and lateral alignmentGPS-denied Navigation – status-at-a-glance and operator controlsNavigation data transmittedfrom a Manned Leader Vehicleenables the ATMA to followbehind completely driverless ina “Leader/Follower”configuration.6NASDAQ:KTOS
The TechnologySteering ActuatorA retrofit kit solution enables any fleet vehicle tobe converted into an autonomous system.System components include on-board computer,navigation system, actuators, user interface, andactive safety system.E-Stop SafetyObstacleDetection& AvoidanceLeader Vehicle User Interface7NASDAQ:KTOS
DeploymentsThere is significant worldwide interest in the deployment of the ATMA whichuses currently available driverless technology to solve a real world problem.England - COLASCaltransDeployments Florida DOT – Leased Colorado DOTMinnesota DOTNorth Dakota DOTMore than 2,000 miles of operation since 2017Deployed 11 systems to date in locations thatinclude England, CO, MO, CA, MN, TN, FL, ND, INPooled Fund – hosted by CDOT serves an ATMAdiscussion forum for topics such as: system improvements expansion of use refining policy and operationalprocedures Investigation of additional applicationsof technology 13 participating states to include: Missouri DOT11Tennessee DOT - LeasedAL, CA, CO, IL, KS, MN, MO, NV, OH,OK, TX, VA, WAIndiana DOT – LeasedNASDAQ:KTOS
Testimonials“It is great when military technology can beadapted for civilian use. Especially when ithas the potential such as this (ATMA) to savelives. This is important because this truckwill save lives and help prevent serious crashinjuries to workers in construction zones.NDOT is committed to using innovation andtechnology to improve safety and operationsthroughout North Dakota”12NASDAQ:KTOS
Notable Awards2015 American Road andTransportation Builders Association(ARTBA) Work Zone Safety Award forthe Autonomous TMA Truck2021 American Society of CivilEngineers (ASCE) recognizes theATMA as an “InfrastructureGamechanger”122018 International Road Federation(IRF) Global Road AchievementAward for the Autonomous TMA2018 Chartered Institution ofHighways and Transportation (CIHT)Ringway Innovation Award RunnerUp and Highly Commended forAutonomous Impact ProtectionVehicle (AIPV)2022 Award Announcement To BeReleased Soon .NASDAQ:KTOS
BenefitsThe ATMA aligns with Federal Highways work zone safety objectives and is a great implementation ofCAV technologies to improve the day-to-day lives of our workers.Work Zone SafetyIdeal for CAV ProgramBetter Employee ExperienceReduced Worker Exposure to DangerEasy to Use, Easy to Deploy Clearly Defined Objective – Safety Operates in Specific Environment –mobile highway maintenanceoperations Operates at Slow Speed – typical 15 mph Requires 0 Mods to ExistingInfrastructure – deployable anytime/where Positive Public Awareness – a feelgood story that everyone canunderstandEnhanced With Technology Safety – TMA vehicles are nowoperated from a safe location; thelead vehicle Strategic Workforce Development –an opportunity to work with CAVtechnologies Availability – able to support otherwork zone activities – cross training 13Increased Safety – keep yourworkers out of harm’s way – nowprotected by the ATMAImproved Worker Quality of Life –reduced work zone anxietyLower Costs – fewer injuries meansfewer liability claimsWork Zone Optimization –increased efficiency means less timeon the roadNASDAQ:KTOS
Questions15NASDAQ:KTOS
Development of Operation Guidelinesfor Leader-Follower AutonomousMaintenance Vehicles at Work ZoneLocationsQing Tang, PhD Student, qingtang@psu.eduAdvisor: Dr. Xianbiao (XB) HuDepartment of Civil and Environmental EngineeringPennsylvania State University
How to drive Autonomous Truck MountedAttenuator (ATMA) vehicles? What are minimum requirements? Car-following distance Lane-changing gap Intersection clearance time31
Preliminaries Newell’s car-following model (2002) Following vehicle n’s trajectory𝑥𝑛 𝑡 𝜏𝑛 𝑥𝑛 1 𝑡 𝑑𝑛 Required car-following distance𝑠𝑛,𝑖 𝑑𝑛 𝑣𝑖 𝜏𝑛Time-space Diagram of Newell’s car-followingmodelRelationship between Spacing and Velocity for ASingle Vehicle32
Preliminaries Critical Gaps for Lane-changing Lane-changing modelo Proposed by Yang and Koutsopoulos (1996) Acceptable gapo 𝐿 𝐿lead 𝐿lag 𝐿vehicle lengthTotal clear gap vehicle length 33
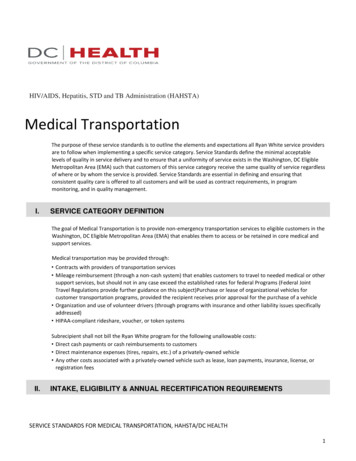
Preliminaries Roll-ahead Distance (RAD)o In the work zone, a truck mounted attenuator (TMA)-equipped vehicleshould be positioned as a sufficient distance in advance of the workers orequipment being protected.o The RAD varies depending on the weights and speeds of the two vehiclesinvolved, the extent to which the shadow vehicle is restrained, and certainpavement characteristics.o ATMA follower truck: 23.365 lbsGuidelines for spacing of shadow vehicles (from AASHTO Roadside Design Guide)Weight of shadowvehicle (lb) 22,000Traffic operatingspeed (mph) 55Recommended RAD for movingoperation (ft)17245 55150 45100RAD34
Data Collection Leader Truck Follower Truck35
Data Collection Maximum deceleration of ATMA vehicles from emergency stoptest Operation speed is 10 mphoo Average deceleration is 9.1 ft/s2Maximum is 9.4 ft/s2Operation speed is 15 mphooAverage deceleration is 11.4 ft/s2Maximum is 12.4 ft/s2 Breaking reaction time is taken 2.5 s (AASHTO recommend)The Stop Time and Distance in Emergency Stop TestSet GAP 100′Run 110 mph 1.56 sStop TimeRun 2Run 31.56 s1.75 s15 mph 1.91 s2.13 sSpeed1.78 s0.09Stop DistanceRun 1Run 2Run 311.5’ 15.75’20.5’0.1431.08’Standard Deviation37’26.58’Standard Deviation3.684.2736
Minimum Car-following Distance Requirement Minimum car-following distance for Leader Truck (LT) 𝑠lt 𝑣lt 𝜏lt 𝑑lto 𝑣lt 𝜏lt : Distance the leader truck travels before a brake is initialedo 𝑑lt : Braking distance 𝑑lt 𝑣lt 2 02 𝑎lt 𝑣lt 22𝑎lt Minimum car-following distance: 75 ftMinimum car-following distance of a leader truck37
Minimum Car-following Distance Requirement Minimum car-following distance for Follower Truck (FT) 𝑠ft max RAD, 𝑑ft 𝜀 max𝑣ft 2 0RAD, 2 𝑎 ft𝜀o The 95 percentiles of errors are found to be 6 ft, i.e., 𝜀 6fto𝑣ft 22 𝑎ft 𝜀 26 ft (𝑣ft : 5 15 mph)o 𝑠ft RAD, 100 172 ftTraffic operatingspeed (mph) 55Recommended RAD for movingoperation (ft)17245 55150 4510095%, 6 ftFrequency distribution histogram oferror in following distance38
Critical Gap Distance Requirement for Lane-changing Required minimum acceptable gap distanceo 𝐿 𝐿lead 𝐿lag (𝐿lt 𝐿gap 𝐿ft ) Minimum time headway 𝑡min 𝑡rps 𝑣𝑎 Critical gap distance and time headway𝑣21. 𝐿lead 𝑣lt 𝑡rps,lt 2𝑎lt 𝑡min,1 𝑡rps,lt 𝑣lt Τ𝑎ltlt22. 𝐿lag 𝑣ffs 𝑡rps,gv 𝑣ffs/2𝑎gv 𝑡min,2 𝑡rps,gv 𝑣ffs Τ𝑎gv3. 𝐿lt 𝐿gap 𝐿ft 𝑡min,3 𝐿gap 𝐿lt 𝐿ft𝑣lt max(RAD,𝐿gap,0 ) 𝐿lt 𝐿ft𝑣ltgv: General vehicle𝑡rps : Response time𝑣ffs : Free flow speed𝐿gap,0 : Preset gap distance39
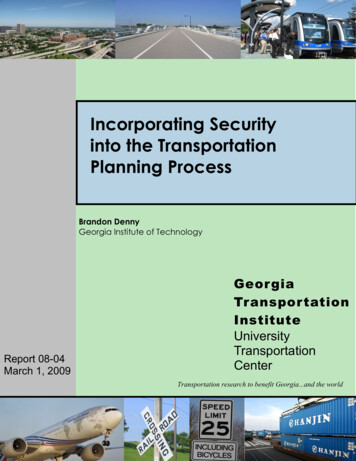
Critical Gap Distance Requirement for Lane-changing FFS 70 mph & preset gapdistance (𝐿gap,0 100 ft) Critical gap distanceo 886 ft 940 ft Time headway: 25 47 s FFS 70 mph & 𝐿gap,0 200 ft Critical gap distanceo 914 ft 968 ft Time headway: 26 51 sCritical Time Headway and Gap Distance Requirement for LaneChanging : (a) 100 ft Gap Distance; (b) 200 ft Gap Distance.40
Intersection Clearance Time Requirement Go straight 𝑡straight (𝐿length max(RAD, 𝐿gap,0 ) 𝐿lt 𝐿ft )/𝑣lt 𝐿gap,0 : preset gap distance Left turn 𝑡turn (𝐿width max(RAD, 𝐿gap,0 ) 𝐿lt 𝐿ft )/𝑣lt Required time 10s to 31s with a gap distance of 100 ft 13s to 38s with a gap distance of 150 ft 15s to 45s with a gap distance of 200 ft. Lane width is set to be 12 ft Intersection length: 𝐿length 48 ft Intersection width: 𝐿width 𝜋 24 6 2/4 47.1 ftRequired Time at An Intersection to: (a) go straight; (b) turn left41
How to apply the guidelines? Combining with CAV technology Sensors – obstacles detection, gap distance Vehicle-to-infrastructure (V2I) – information from traffic signal controller42
Thank you!Questions?Email: qingtang@psu.edu*Tang, Q., Hu, X., & Qin, R. (2021). Development of Operation Guidelines forLeader–Follower Autonomous Maintenance Vehicles at Work Zone Locations.Transportation Research Record, 03611981211056644.43
Dr. Erika Miller, Colorado State University 2. 5380-19-03: Development of ATMA/AIPV Deployment Guidelines, Dr. XB Hu, Missouri Science and Technology 3. 5380-20-04: ATMA Tabletop, All Clear Emergency Management Group 4. 5380-20-05: ATMA Tabletop, Cyber Security Complement, Dr. Jeremy Daily, Colorado State University 5. 5380-20-06: ATMA .