Transcription
Introduction to Group TheoryWith Applications to Quantum Mechanicsand Solid State PhysicsRoland Winklerrwinkler@niu.eduAugust 2011(Lecture notes version: November 3, 2015)Please, let me know if you find misprints, errors or inaccuracies in these notes.Thank you.Roland Winkler, NIU, Argonne, and NCTU 2011 2015
General LiteratureIJ. F. Cornwell, Group Theory in Physics (Academic, 1987)general introduction; discrete and continuous groupsIW. Ludwig and C. Falter, Symmetries in Physics(Springer, Berlin, 1988).general introduction; discrete and continuous groupsIW.-K. Tung, Group Theory in Physics (World Scientific, 1985).general introduction; main focus on continuous groupsIL. M. Falicov, Group Theory and Its Physical Applications(University of Chicago Press, Chicago, 1966).small paperback; compact introductionIE. P. Wigner, Group Theory (Academic, 1959).classical textbook by the masterILandau and Lifshitz, Quantum Mechanics, Ch. XII (Pergamon, 1977)brief introduction into the main aspects of group theory in physicsIR. McWeeny, Symmetry (Dover, 2002)elementary, self-contained introductionIand many othersRoland Winkler, NIU, Argonne, and NCTU 2011 2015
Specialized LiteratureIG. L. Bir und G. E. Pikus, Symmetry and Strain-Induced Effects inSemiconductors (Wiley, New York, 1974)thorough discussion of group theory and its applications in solid statephysics by two pioneersIC. J. Bradley and A. P. Cracknell, The Mathematical Theory ofSymmetry in Solids (Clarendon, 1972)comprehensive discussion of group theory in solid state physicsIG. F. Koster et al., Properties of the Thirty-Two Point Groups(MIT Press, 1963)small, but very helpful reference book tabulating the properties ofthe 32 crystallographic point groups (character tables, Clebsch-Gordancoefficients, compatibility relations, etc.)IA. R. Edmonds, Angular Momentum in Quantum Mechanics(Princeton University Press, 1960)comprehensive discussion of the (group) theory of angular momentumin quantum mechanicsIand many othersRoland Winkler, NIU, Argonne, and NCTU 2011 2015
These notes are dedicated toProf. Dr. h.c. Ulrich Rösslerfrom whom I learned group theoryR.W.Roland Winkler, NIU, Argonne, and NCTU 2011 2015
Introduction and OverviewDefinition: GroupA set G {a, b, c, . . .} is called a group, if there exists a group multiplicationconnecting the elements in G in the following way(1)a, b G :(2)a, b, c G :(3) e G :(4) a Gc ab G(closure)(ab)c a(bc)ae a b G :(associativity) a Ga b e,(identity / neutral element)i.e., b a 1(inverse element)Corollaries(a)e 1 e(b) a 1 a a a 1 e(c)e a ae a(d) a, b G : a G(left inverse right inverse) a Gc ab c(left neutral right neutral) 1 b 1 1aCommutative (Abelian) Group(5) a, b G :ab ba(commutatitivity)Order of a Group number of group elementsRoland Winkler, NIU, Argonne, and NCTU 2011 2015
ExamplesIinteger numbersZ with addition(Abelian group, infinite order)Irational numbersQ\{0} with multiplication(Abelian group, infinite order)Icomplex numbers {exp(2πi m/n) : m 1, . . . , n} with multiplication(Abelian group, finite order, example of cyclic group)Iinvertible ( nonsingular) n n matrices with matrix multiplication(nonabelian group, infinite order, later important for representation theory!)Ipermutations of n objects: Pn(nonabelian group, n! group elements)Isymmetry operations (rotations, reflections, etc.) of equilateral triangle P3 permutations of numbered corners of triangle – more later!I(continuous) translations in vector addition inIRnRn : (continuous) translation groupsymmetry operations of a sphereonly rotations: SO(3) special orthogonal group in R3 real orthogonal 3 3 matricesRoland Winkler, NIU, Argonne, and NCTU 2011 2015
Group Theory in PhysicsGroup theory is the natural language to describe symmetries of a physicalsystemIsymmetries correspond to conserved quantitiesIsymmetries allow us to classify quantum mechanical states representation theory degeneracies / level splittingsIevaluation of matrix elements Wigner-Eckart theoreme.g., selection rules: dipole matrix elements for optical transitionsIHamiltonian Ĥ must be invariant under the symmetriesof a quantum system construct Ĥ via symmetry argumentsI.Roland Winkler, NIU, Argonne, and NCTU 2011 2015
Group Theory in PhysicsClassical MechanicsIIILagrange function L(q, q̇), Ld L Lagrange equationsdt q̇i qiIf for one j : L L 0 pj qj q̇ji 1, . . . , Nis a conserved quantityExamplesIqj linear coordinate translational invariance linear momentum pj const. translation groupIqj angular coordinate rotational invariance angular momentum pj const. rotation groupRoland Winkler, NIU, Argonne, and NCTU 2011 2015
Group Theory in PhysicsQuantum Mechanics(1) Evaluation of matrix elementsIConsider particle in potential V (x) V ( x) evenItwo possiblities for eigenfunctions ψ(x)ψe (x) even:IIψe (x) ψe ( x)ψo (x) odd: ψo (x) ψo ( x)R ψi (x) ψj (x) dx δijoverlappi, j {e, o}R expectation value hi x ii ψi (x) x ψi (x) dx 0well-known explanationIproduct of two even / two odd functions is evenIproduct of one even and one odd function is oddIintegral over an odd function vanishesRoland Winkler, NIU, Argonne, and NCTU 2011 2015
Group Theory in PhysicsQuantum Mechanics(1) Evaluation of matrix elements (cont’d)Group theory provides systematic generalization of these statementsIrepresentation theory classification of how functions and operators transformunder symmetry operationsIWigner-Eckart theorem statements on matrix elements if we know how the functionsand operators transform under the symmetries of a systemRoland Winkler, NIU, Argonne, and NCTU 2011 2015
Group Theory in PhysicsQuantum Mechanics(2) Degeneracies of Energy EigenvaluesISchrödinger equation Ĥψ E ψ or i t ψ ĤψILet Ô with i t Ô [Ô, Ĥ] 0 Ô is conserved quantity eigenvalue equations Ĥψ E ψ and Ôψ λÔ ψcan be solved simultaneously eigenvalue λÔ of Ô is good quantum number for ψExample: H atomIĤ 22m 22 2 rr r L̂2e2 22mrr group SO(3) [L̂2 , Ĥ] [L̂z , Ĥ] [L̂2 , L̂z ] 0 eigenstates ψnlm (r):index l L̂2 ,m L̂zIreally another example for representation theoryIdegeneracy for 0 l n 1: dynamical symmetry (unique for H atom)Roland Winkler, NIU, Argonne, and NCTU 2011 2015
Group Theory in PhysicsQuantum Mechanics(3) Solid State Physicsin particular: crystalline solids, periodic assembly of atoms discrete translation invariance(i) Electrons in periodic potential V (r)IV (r R) V (r) R {lattice vectors} translation operator T̂R :T̂R f (r) f (r R)[T̂R , Ĥ] 0 Bloch theorem ψk (r) eik·r uk (r) with uk (r R) uk (r) wave vector k is quantum number for the discrete translation invariance,k first Brillouin zoneRoland Winkler, NIU, Argonne, and NCTU 2011 2015
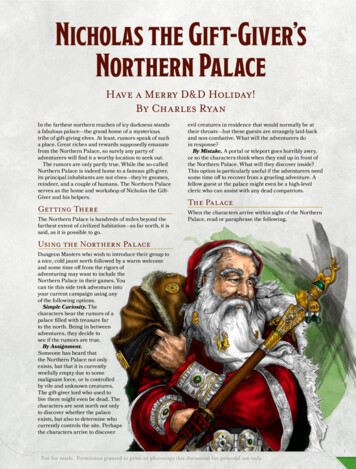
Group Theory in PhysicsQuantum Mechanics(3) Solid State Physicsrotation(ii) Phononsby 90 oIConsider square latticeIfrequencies of modes are equalIdegeneracies for particular propagation directions(iii) Theory of InvariantsIHow can we construct models for the dynamics of electronsor phonons that are compatible with given crystal symmetries?Roland Winkler, NIU, Argonne, and NCTU 2011 2015
Group Theory in PhysicsQuantum Mechanics(4) Nuclear and Particle PhysicsPhysics at small length scales: strong interaction Proton mp 938.28 MeVrest mass of nucleons almost equal degeneracyNeutron mn 939.57 MeVISymmetry: isospin ÎISU(2):proton 12with12 i,[Î , Ĥstrong ] 0neutron 12 12 iRoland Winkler, NIU, Argonne, and NCTU 2011 2015
Mathematical Excursion: GroupsBasic ConceptsGroup Axioms: see aboveDefinition: Subgroup Let G be a group. A subset U G that is itself agroup with the same multiplication as G is called a subgroup of G.Group Multiplication Table: compilation of all products of group elements complete information on mathematical structure of a (finite) groupExample: permutation group P3 1 2 31 2 31e a b 1 2 32 3 13 1 2 31 2 31c d f 1 3 23 2 12I2 31 2 2 31 3 {e}, {e, a, b}, {e, c}, {e, d}, {e, f }, G are subgroups of GRoland Winkler, NIU, Argonne, and NCTU 2011 2015
IP3eabSymmetry w.r.t. main diagonalc group is Abeliandorder n of g G: smallest n 0 with g n e fI{g , g 2 , . . . , g n e} with g G is Abelian subgroup (a cyclic group)Iin every row / column every element appears exactly once because:Conclusions fromGroup Multiplication arrangement Lemma: for any fixed g 0 G, we haveG {g 0 g : g G} {gg 0 : g G}i.e., the latter sets consist of the elements in G rearranged in order.proof: g1 6 g2 g 0 g1 6 g 0 g2 g1 , g2 , g 0 GRoland Winkler, NIU, Argonne, and NCTU 2011 2015
Goal: Classify elements in a group(1) Conjugate Elements and ClassesILet a G. Then b G is called conjugate to a if x G with b x ax 1 .Conjugation b a is equivalence relation: a areflexive b a a bsymmetric a co a btransitiveb cIa xcx 1 c x 1 axb ycy 1 (xy 1 ) 1 a(xy 1 )For fixed a, the set of all conjugate elementsC {x ax 1 : x G} is called a class. identity e is its own classxex 1 e x G Abelian groups: each element is its own classx ax 1 ax x 1 a a, x G Each b G belongs to one and only one class decompose G into classes in broad terms: “similar” elements form a classExample:x e ae e aa e ab e ac e bd e bf e bP3bbbbaaaccdfcfdddfcfdcffcddcf classes {e}, {a, b},{c, d, f }Roland Winkler, NIU, Argonne, and NCTU 2011 2015
Goal: Classify elements in a group(2) Subgroups and CosetsIILet U G be a subgroup of G and x G. The set x U {x u : u U}(the set Ux) is called the left coset (right coset) of U.In general, cosets are not groups.If x / U , the coset x U lacks the identity element:suppose u U with xu e x U x 1 u U x u 1 UIIIf x 0 x U, then x 0 U x U any x 0 x U can be used to define coset x UIf U contains s elements, then each coset also contains s elements(due to rearrangement lemma).ITwo left (right) cosets for a subgroup U are either equal or disjoint(due to rearrangement lemma).IIIIThus: decompose G into cosetsG U x U y U . . . x, y , . . . /U hThus Theorem 1: Let h order of G NLet s order of U GsCorollary: The order of a finite group is an integer multiple of theorders of its subgroups.Corollary: If h prime number {e}, G are the only subgroups G is isomorphic to cyclic groupRoland Winkler, NIU, Argonne, and NCTU 2011 2015
Goal: Classify elements in a group(3) Invariant Subgroups and Factor Groupsconnection: classes and cosetsIA subgroup U G containing only complete classes of G is calledinvariant subgroup (aka normal subgroup).ILet U be an invariant subgroup of G and x G x Ux 1 U x U UxI(left coset right coset)Multiplication of cosets of an invariant subgroup U G:x, y G :(x U) (y U) xy U z Uwherez xywell-defined: (x U) (y U) x (U y ) U xy U U z U U z UIAn invariant subgroup U G and the distinct cosets x Uform a group, called factor group F G/U group multiplication: see above U is identity element of factor group x 1 U is inverse for x UIEvery factor group F G/U is homomorphic to G (see below).Roland Winkler, NIU, Argonne, and NCTU 2011 2015
Example: Permutation Group invariant subgroup U {e, a, b} one coset cU dU f U {c, d, f }factor group P3 /U {U, cU}U cUU U cUcU cU UIWe can think of factor groups G/U as coarse-grained versions of G.IOften, factor groups G/U are a helpful intermediate step whenworking out the structure of more complicated groups G.IThus: invariant subgroups are “more useful” subgroups than othersubgroups.Roland Winkler, NIU, Argonne, and NCTU 2011 2015
Mappings of Groups0ILet G and G be two groups. A mapping φ : G G 0 assigns to eachg G an element g 0 φ(g ) G 0 , with every g 0 G 0 being the imageof at least one g G.IIf φ(g1 ) φ(g2 ) φ(g1 g2 ) g1 , g2 G,then φ is a homomorphic mapping of G on G 0 . A homomorphic mapping is consistent with the group structures A homomorphic mapping G G 0 is always n-to-one (n 1):The preimage of the unit element of G 0 is an invariant subgroup U of G.G 0 is isomorphic to the factor group G/U.IIf the mapping φ is one-to-one, then it is an isomomorphic mappingof G on G 0 . Short-hand: G isomorphic to G 0 G ' G 0 Isomorphic groups have the same group structure.IExamples: trivial homomorphismG P3 and G 0 {e} isomorphism between permutation group P3 and symmetry group C3v ofequilateral triangleRoland Winkler, NIU, Argonne, and NCTU 2011 2015
Products of GroupsIGiven two groups G1 {ai } and G2 {bk }, their outer direct productis the group G1 G2 with elements (ai , bk ) and multiplication(ai , bk ) · (aj , bl ) (ai aj , bk bl ) G1 G2 Check that the group axioms are satisfied for G1 G2 . Order of Gn is hn (n 1, 2) order of G1 G2 is h1 h2 If G G1 G2 , then both G1 and G2 are invariant subgroups of G.Then we have isomorphisms G2 ' G/G1 and G1 ' G/G2 . Application: built more complex groups out of simpler groupsIIf G1 G2 G {ai }, the elements(ai , ai ) G Gdefine a group G̃ G G called the inner product of G. The inner product G G is isomorphic to G ( same order as G) Compare: product representations (discussed below)Roland Winkler, NIU, Argonne, and NCTU 2011 2015
Matrix Representations of a GroupMotivatione identityi inversionIConsider symmetry group Ci {e, i}Itwo “types” of basis functions: even and oddmore abstract: reducible and irreducible representationsICi e ie e ii i ematrix representation (based on 1 1 and 2 2 matrices) Γ1 {De 1, Di 1} consistent with groupΓ2 {De 1, D i 1} multiplication table101 0Γ3 De 0 1 , Di 0 1 where Γ1 : even function fe (x) fe ( x)irreduciblerepresentationsΓ2 : odd functions fo (x) fo ( x)Γ3 : reducible representation:decompose any f (x) into even and odd parts fe (x) 21 f (x) f ( x)f (x) fe (x) fo (x) with fo (x) 21 f (x) f ( x)How to generalize these ideas for arbitrary groups?Roland Winkler, NIU, Argonne, and NCTU 2011 2015
Matrix Representations of a Groupgroup G {gi : i 1, . . . , h}ILetIAssociate with each gi G a nonsingular square matrix D(gi ).If the resulting set {D(gi ) : i 1, . . . , h} is homomorphic to Git is called a matrix representation of G. gi gj gk D(gi ) D(gj ) D(gk ) D(e) ID(gi 1 )1 (identity matrix) D 1 (gi )dimension of representation dimension of representation matricesExample (1): G C rotations around a fixed axis (angle φ)I C is isomorphic to group of orthogonal 2 2 matrices SO(2) cos φ sin φD2 (φ) two-dimensional (2D) representationsin φ cos φIIIC is homomorphic to group {D1 (φ) 1} trivial 1D representation 1 0higher-dimensionalC is isomorphic to group representation0 D2 (φ)Generally: given matrix representations of dimensions n1 and n2 ,we can construct (n1 n2 ) dimensional representationsRoland Winkler, NIU, Argonne, and NCTU 2011 2015
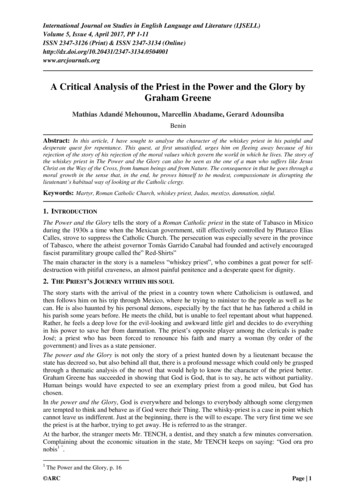
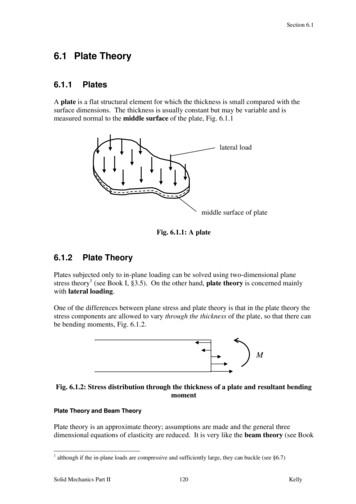
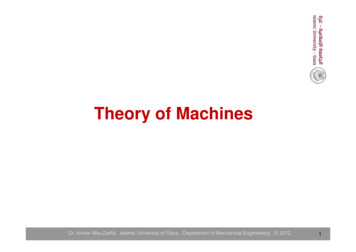
Matrix Representations of a Group (cont’d)identityrotationφ 120 rotationφ 240 reflectiony yrotoreflectionφ 120 rotoreflectionφ 240 Example (2): Symmetry group C3v of equilateral triangle(isomorphic to permutation group P3 )P3KostereEaC3b a2C32c ecσvd acσvf bcσvΓ1Γ2(1)(1)(1)(1)(1)(1)(1)( 1)(1)( 1)Γ31 00 1(1)( 1) yxP3emultipli- acationbtablecdfeeabcdf aabedfc bbeafcd 12 23 3 122ccfdebaddcfaebffdcbae 21 32 23 121 00 1 21 23 2312 12 323 212Imapping G {D(gi )} homomorphic,but in general not isomorphic (not faithful)Iconsistent with group multiplication tableIGoal: characterize matrix representations of GIWill see: G fully characterized by its “distinct”matrix representations (only three for G C3v !)Roland Winkler, NIU, Argonne, and NCTU 2011 2015
Goal: Identify and Classify RepresentationsITheorem 2: If U is an invariant subgroup of G, then every representationof the factor group F G/U is likewise a representation of G.Proof: G is homomorphic to F, which is homomorphic to the representations of F.Thus: To identify the representations of G it helps to identify the representations of F.IDefinition: Equivalent RepresentationsLet {D(gi )} be a matrix representation for G with dimension n.Let X be a n-dimensional nonsingular matrix.The set {D0 (gi ) X D(gi ) X 1 } forms a matrix representationcalled equivalent to {D(gi )}.Convince yourself: {D0 (gi )} is, indeed, another matrix representation.Matrix representations are most convenient if matrices {D} are unitary. ThusITheorem 3: Every matrix representation {D(gi )} is equivalent to a unitaryrepresentation {D0 (gi )} where D0 † (gi ) D0 1 (gi )IIn the following, it is always assumed that matrix representations are unitary.Roland Winkler, NIU, Argonne, and NCTU 2011 2015
Proof of Theorem 3 (cf. Falicov)Challenge: Matrix X has to be choosen such that it makes all matricesD0 (gi ) unitary simultaneously.IILet {D(gi ) Di : i 1, . . . , h} be a matrix representation for G(dimension h).hPDi Di† (Hermitean)Define H i 1IThus H can be diagonalized by means of a unitary matrix U.P 1P 1d U 1 HU U Di Di 1 U U Di U U 1 Di 1 U{z }ii {z } P D̃i† D̃i†D̃i D̃i with dµν dµ δµν diagonal IDiagonal entries dµ are positive:PPPPdµ (D̃i )µλ (D̃i† )λµ (D̃i )µλ (D̃i )µλ (D̃i )µλ 2 0iiIIiλλiλ 1/2Take diagonal matrix d̃ with elements (d̃ )µν dµδµνPThus 1 d̃ d d̃ d̃ D̃i D̃i† d̃ (identity matrix)iRoland Winkler, NIU, Argonne, and NCTU 2011 2015
Proof of Theorem 3 (cont’d)IAssertion: Di0 d̃ D̃i d̃ d̃ U 1 Di U d̃ are unitary matricesequivalent to Di equivalent by construction: X d̃ U 1 unitarity:Di0Di0 † 1} {zP d̃ D̃i d̃ (d̃ D̃k D̃k† d̃ ) d̃ D̃i† d̃ kP d̃ D̃i D̃k D̃k† D̃i† d̃ k {z } {z } D̃j D̃j†(rearrangement lemma) {z} d 1qedRoland Winkler, NIU, Argonne, and NCTU 2011 2015
Reducible and Irreducible Representations(RRs and IRs)IIf for a given representation {D(gi ) : i 1, . . . , h}, an equivalentrepresentation {D0 (gi ) : i 1, . . . , h} can be found that is blockdiagonal 0D1 (gi )00 gi GD (gi ) 0D20 (gi )then {D(gi ) : i 1, . . . , h} is called reducible, otherwise irreducible.ICrucial: the same block diagonal form is obtainedfor all representation matrices D(gi ) simultaneously.IBlock-diagonal matrices do not mix, i.e., if D0 (g1 ) and D0 (g2 ) areblock diagonal, then D0 (g3 ) D0 (g1 ) D0 (g2 ) is likewise block diagonal. Decomposition of RRs into IRs decomposes the probleminto the smallest subproblems possible.IGoal of Representation TheoryIdentify and characterize the IRs of a group.IWe will showThe number of inequivalent IRs equals the number of classes.Roland Winkler, NIU, Argonne, and NCTU 2011 2015
Schur’s First LemmaSchur’s First Lemma: Suppose a matrix M commutes withall matrices D(gi ) of an irreducible representation of GD(gi ) M M D(gi ) gi G( )then M is a multiple of the identity matrix M c 1,c C.CorollariesIIf ( ) holds with M 6 c 1, c C, then {D(gi )} is reducible.IAll IRs of Abelian groups are one-dimensionalProof: Take gj G arbitrary, but fixed.G Abelian D(gi ) D(gj ) D(gj ) D(gi ) gi GLemma D(gj ) cj 1 with cj C, i.e., {D(gj ) cj } is an IR.Roland Winkler, NIU, Argonne, and NCTU 2011 2015
Proof of Schur’s First Lemma (cf. Bir & Pikus)ITake Hermitean conjugate of ( ): M † D† (gi ) D† (gi ) M †Multiply with D† (gi ) D 1 (gi ):ID(gi ) M † M † D(gi )Thus: ( ) holds for M and M † , and also the Hermitean matricesM 0 21 (M M † )M 00 2i (M M † )IIt exists a unitary matrix U that diagonalizes M 0 (similar for M 00 )d U 1 M 0 U with dµν dµ δµνIThus ( ) implies D0 (gi ) d d D0 (gi ), where D0 (gi ) U 1 D(gi ) U0more explicitly: Dµν(gi ) (dµ dν ) 0 i, µ, νRoland Winkler, NIU, Argonne, and NCTU 2011 2015
Proof of Schur’s First Lemma (cont’d)Two possibilities:IAll dµ are equal, i.e, d c 1.So M 0 UdU 1 and M 00 are likewise proportional to 1, and so isM M 0 iM 00 .ISome dµ are different:Say {dκ : κ 1, . . . , r } are different from {dλ : λ r 1, . . . , h}.Thus:0Dκλ(gi ) 0 κ 1, . . . , r ; λ r 1, . . . , hThus {D0 (gi ) : i 1, . . . , h} is block-diagonal, contrary to theassumption that {D(gi )} is irreducibleqedRoland Winkler, NIU, Argonne, and NCTU 2011 2015
Schur’s Second LemmaSchur’s Second Lemma: Suppose we have two IRs{D1 (gi ), dimension n1 } and {D2 (gi ), dimension n2 },as well as a n1 n2 matrix M such thatD1 (gi ) M M D2 (gi ) gi G( )(1) If {D1 (gi )} and {D2 (gi )} are inequivalent, then M 0.(2) If M 6 0 then {D1 (gi )} and {D2 (gi )} are equivalent.Roland Winkler, NIU, Argonne, and NCTU 2011 2015
Proof of Schur’s Second Lemma (cf. Bir & Pikus)ITake Hermitean conjugate of ( ); use D† (gi ) D 1 (gi ) D(gi 1 ),soM † D1 (gi 1 ) D2 (gi 1 )M †IMultiply by M on the left; Eq. ( ) implies M D2 (gi 1 ) D1 (gi 1 ) M,soMM † D1 (gi 1 ) D1 (gi 1 )MM † gi 1 GISchur’s first lemma implies that MM † is square matrix withwith c CMM † c 1I(*)Case a: n1 n2 If c 6 0 then det M 6 0 because of (*), i.e., M is invertible.So ( ) impliesM 1 D1 (gi ) M D2 (gi )thus {D1 (gi )} and {D2 (gi )} are equivalent. gi G If c 0 then MM † 0, i.e.,P†Mµν Mνµ νPν Mµν MµνP Mµν 2 0 µνso that M 0.Roland Winkler, NIU, Argonne, and NCTU 2011 2015
Proof of Schur’s Second Lemma (cont’d)ICase b: n1 6 n2(n1 n2 to be specific) Fill up M with n2 n1 rows to get matrix M̃ with det M̃ 0. However M̃ M̃ † MM † , so thatdet(MM † ) det(M̃ M̃ † ) (det M̃) (det M̃ † ) 0 So c 0, i.e., MM † 0, and as before M 0.qedRoland Winkler, NIU, Argonne, and NCTU 2011 2015
Orthogonality Relations for IRsNotation:I Irreducible Representations (IR): ΓI {DI (gi ) : gi G}I nI dimensionality of IR ΓII h order of group GTheorem 4: Orthogonality Relations for Irreducible Representations(1) two inequivalent IRs ΓI 6 ΓJhP µ0 , ν 0 1, . . . , nIDI (gi ) µ0 ν 0 DJ (gi )µν 0 µ, ν 1, . . . , nJi 1(2) representation matrices of one IR ΓIhnI PDI (gi ) µ0 ν 0 DI (gi )µν δµ0 µ δν 0 νh i 1 µ0 , ν 0 , µ, ν 1, . . . , nIRemarksI [DI (gi )µν : i 1, . . . , h] form vectors in a h-dim. vector spacepI vectors are normalized toh/nI (because ΓI assumed to be unitary)IIvectors for different I , µν are orthogonalPPin total, we have I nI2 such vectors; therefore I nI2 hCorollary: For finite groups the number of inequivalent IRs is finite.Roland Winkler, NIU, Argonne, and NCTU 2011 2015
Proof of Theorem 4: Orthogonality Relations for IRs(1) two inequivalent IRs ΓI 6 ΓJI Take arbitrary nJ nI matrix X 6 0PI Let M DJ (gi ) X DI (gi 1 )i M(i.e., at least one Xµν 6 0) 1z} {z} {DJ (gk ) DJ (gi ) X DI (gi 1 ) DI 1 (gk ) DI (gk ) DJ (gk ) M i {z} {z}PDJ (gk gi ) XDI 1 (gk gi )DI (gk ) {z} {z}i gj gjP 1 DJ (gj ) X DI (gj ) DI (gk )Pj {z} MDI (gk ) (Schur’s Second Lemma)0 Mµµ0 µ, µ0PPin particular correct forDJ (gi )µκ Xκλ DI (gi 1 )λµ0 Xκλ δνκ δλν 0i κ,λP 1 DJ (gi )µν DI (gi )ν 0 µ0iP DI (gi ) µ0 ν 0 DJ (gi )µνqediRoland Winkler, NIU, Argonne, and NCTU 2011 2015
Proof of Theorem 4: Orthogonality Relations for IRs (cont’d)(2) representation matrices of one IR ΓIFirst steps similar to case (1):PI Let M DI (gi ) X DI (gi 1 ) with nI nI matrix X 6 0i DI (gk ) M M DI (gk ) (Schur’s First Lemma): M c 1, c CPPI Thus c δµµ0 DI (gi )µκ Xκλ DI (gi 1 )λµ0i κ,λP DI (gi )µν DI (gi 1 )ν 0 µ0 Mµµ0choose Xκλ δνκ δλν 0iI1P Ph1Pc Mµµ DI (gi )µν DI (gi 1 )ν 0 µ δνν 0nI µnI i µnI {z}DI (gi 1 gi e)ν 0 ν δνν 0qedRoland Winkler, NIU, Argonne, and NCTU 2011 2015
Goal: Characterize different irreducible representations of a groupCharactersIThe traces of the representation matrices are called charactersPχ(gi ) tr D(gi ) i D(gi )µµIEquivalent IRs are related via a similarity transformationD0 (gi ) X D(gi )X 1with X nonsingularThis transformation leaves the trace invariant: tr D0 (gi ) tr D(gi ) Equivalent representations have the same characters.ITheorem 5: If gi , gj G belong to the same class Ck of G, then forevery representation ΓI of G we have χI (gi ) χI (gj )Proof: gi , gj C x Gwithgi x gj x 1 Thus DI (gi ) DI (x) DI (gj ) DI (x 1 ) χI (gi ) tr DI (x) DI (gj ) DI (x 1 ) (trace invariant undercyclic permutation) tr DI (x 1 ) DI (x) DI (gj ) χI (gk ) {z} 1Roland Winkler, NIU, Argonne, and NCTU 2011 2015
Characters (cont’d)NotationI χI (Ck ) denotes the character of group elements in class CkIThe array [χI (Ck )] with I 1, . . . , Nk 1, . . . , Ñis called character table.(N number of IRs)(Ñ number of classes)Remark: For Abelian groups the character table is the tableof the 1 1 representation matricesTheorem 6: Orthogonality relations for charactersLet {DI (gi )} and {DJ (gi )} be two IRs of G. Let hk be the number ofelements in class Ck and Ñ the number of classes. ThenÑ hPk Proof: Use orthogonalityχI (Ck ) χJ (Ck ) δIJ I , J 1, . . . , Nrelation for IRsk 1 hIInterpretation: rows [χI (Ck ) : k 1, . . . Ñ] of character tableare like N orthonormal vectors in a Ñ-dimensional vector space N Ñ.IIf two IRs ΓI and ΓJ have the same characters, this is necessary andsufficient for ΓI and ΓJ to be equivalent.Roland Winkler, NIU, Argonne, and NCTU 2011 2015
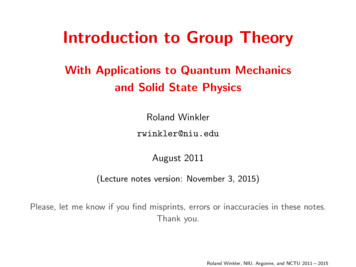
Example: Symmetry group C3v of equilateral triangleidentityrotationφ 120 rotationφ 240 reflectiony yrotoreflectionφ 120 rotoreflectionφ 240 (isomorphic to permutation group P3 )P3KostereEaC3b a2C32c ecσvd acσvf bcσvΓ1Γ2(1)(1)(1)(1)(1)(1)(1)( 1)(1)( 1)Γ31 00 1(1)( 1) yxP3emultipli- acationbtablecdf eeabcdf aabedfc 12 23 3 122bbeafcdccfdebaddcfaeb 21 32 23 12ffdcbae1 00 1 21 23 2312 12 23 3 212Character tableP3ea, b c, d, fC3vE 2C3 3σvΓ1111Γ211 1Γ32 10Roland Winkler, NIU, Argonne, and NCTU 2011 2015
Interpretation: Character TablesIA character table is the uniquely defined signature of a group andits IRs ΓI [independent of, e.g., phase conventions for representationmatrices DI (gi ) that are quite arbitrary].IIsomorphic groups have the same character tables.IYet: the labeling of IRs ΓI is a matter of convention. – Customary: Γ1 identity representation: all characters are 1 IRs are often numbered such that low-dimensional IRs come first;higher-dimensional IRs come later If G contains the inversion, a superscript is added to ΓI indicatingthe behavior of Γ I under inversion (even or odd) other labeling schemes are inspired by compatibility relations(more later)IDifferent authors use different conventions to label IRs. To comparesuch notations we need to compare the uniquely defined charactersfor each class of an IR.(See, e.g., Table 2.7 in Yu and Cardona: Fundamentals of Semiconductors;here we follow Koster et al.)Roland Winkler, NIU, Argonne, and NCTU 2011 2015
Decomposing Reducible Representations (RRs)Into Irreducible Representations (IRs)Given an arbitrary RR {D(gi )} the representation matrices {D(gi )} canbe brought into block-diagonal form by a suitable unitary transformationD(gi ) D (g )1 i. . D1 (gi ) .D0 (gi ) . DN (gi ) .00.DN (gi ) )a1 times.)aN timesTheorem 7: Let aI be the multiplicity, with which the IR ΓI {DI (gi )}is contained in the representation {D(gi )}. ThenNP(1) χ(gi ) aI χI (gi )I 1hÑ hP1Pk(2) aI χ I (gi ) χ(gi ) χ I (Ck ) χ(Ck )h i 1k 1 hWe say: {D(gi )} contains the IR ΓI aI times.Roland Winkler, NIU, Argonne, and NCTU 2011 2015
Proof: Theorem 7(1) due to invariance of trace under similarity transformations(2) we haveNXh1X χI (gi ) haJ χJ (gi ) χ(gi )i 1J 1 NXJ 1hh1X 1X aJχI (gi ) χJ (gi ) χI (gi ) χ(gi )hhi 1i 1 {z}qed δIJApplications of Theorem 7:ICorollary: The representation {D(gi )} is irreducible if and only ifhX χ(gi ) 2 hi 1 Proof: Use Theorem 7 with aI I10for one IotherwiseDecomposition of Product Representations (see later)Roland Winkler, NIU, Argonne, and NCTU 2011 2015
Where Are We?We have discussed the orthogonality relations forIirreducible representationsIcharactersThese can be complemented by matching completeness relations.Proving those is a bit more cumbersome. It requires theintroduction of the regular representation.Roland Winkler, NIU, Argonne, and NCTU 2011 2015
The Regular RepresentationFinding the IRs of a group can be tricky. Yet for finite groups we can derivethe regular representation which contains all IRs of the group.IInterpret group elements gν as basis vectors { gν i : ν 1, . . . h}for a h-dim. representation Regular representation:νth column vector of DR (gi ) gives image gµ i gi gν i gi gν iof basis vector gν i 1if gµ gν 1 gi DR (gi )µν 0otherwiseIStrategy: Re-arrange the group multiplication tableas shown on the right For each gi G we have DR (gi )µν 1,if the entry (µ, ν) in the re-arrangedgroup multiplication table equals gi ,otherwise DR (gi )µν 0.g1g2g3.g1 1 g2 1 g3 1 . . .e.e.e.eRoland Winkler, NIU, Argonne, and NCTU 2011 2015
Properties of the Regular Representation {DR (gi )}(1) {DR (gi )} is, indeed, a representation for the group G(2) It is a faithful representation, i.e., {DR (gi )} is isomorphic to G {gi }. hif gi e(3) χR (gi ) 0otherwiseProof:(1) Matrices {DR (gi )} are nonsingular, as every row / every columncontains “1” exactly once.Show: if gi gj gk , then DR (gi )DR (gj ) DR (gk )Take i, j, µ, ν arbitrary, but fixed DR (gi )µλ 1only for gµ gλ 1 gi gλ gi 1 gµDR (gj )λν 1only for gλ gν 1 gj gλ gj gνP DR (gi )µλ DR (gj )λν 1 only for gi 1 gµ gj gνλ gµ gν 1 gi gj gk[definition of DR (gk )µν ](2) immediate consequence of definition of DR (gi ) 1if gi gµ gµ 1 e(3) DR (gi )µµ 0otherwise Ph if gi e χR (gi
I J. F. Cornwell, Group Theory in Physics (Academic, 1987) general introduction; discrete and continuous groups I W. Ludwig and C. Falter, Symmetries in Physics (Springer, Berlin, 1988). general introduction; discrete and continuous groups I W.-K. Tung, Group Theory in Physics (World Scienti c, 1985). general introduction; main focus on .