Transcription
FRANCIS S. TSEUniversity of CincinnatiIVAN E. MORSEUniversity of CincinnatiT. HINKLEMichigan State UniversityMechanical VibrationsTheory and ApplicationsSECOND EDITIONAllyn and Bacon,BostonSydneyToronto
Copyright1978, 1%3 byand Bacon, Inc.470 Atlantic Avenue, Boston, Massachusetts 02210.rights reserved. Printed in the United States of America.No part of the material protected by this copyright noticemay be reproduced or utilized in any form or by any means,electronic or mechanical, including photocopying, recording,or by any information storage and retrieval system, withoutwritten permission from the copyright owner.Library of Congress Cataloging in Publication DataTse, Francis SingMechanical vibrations.(Allyn and Bacon series in Mechanical engineeringand applied mechanics)Includes index.1. Vibrations. I. Morse, Ivan E., jointHinkle,Theodore, (International)
ContentsPrefacexiCHAPTER 1 INTRODUCTIONPrimary Objective1Elements of a Vibratory SystemExamples of Vibratory MotionsSimple Harmonic MotionVectorial Representationof Harmonic Motions111-6 Units16191-7 SummaryProblems201- 11-21-31-41-525CHAPTER 2 SYSTEMS WITH ONE DEGREEOF FREEDOM-THEORY2-12-22-32-42-5Introduction23Degrees of Freedom25Equation of Motion-Energy MethodEquation of Motion-Newton's Lawof Motion33General Solution34Complementary Function34Particular Integral38General Solution4227
viContentsFrequency Response Method45Impedance Method45Transfer Function49Resonance, Damping, and Bandwidth2-7 Transient Vibration52Impulse Response53Convolution Integral55Indicia1 Response572-8 Comparison of Rectilinearand Rotational Systems582-9 Summary58Problems622-651CHAPTER 3 SYSTEMS WITH ONE DEGREEOF FREEDOM-APPLICATIONSIntroduction69Undamped Free Vibration70Damped-Free Vibration77Undamped Forced VibrationHarmonic Excitation80Damped Forced VibrationHarmonic Excitation86Rotating and ReciprocatingUnbalance87Critical Speed of Rotating Shafts89Vibration Isolation andTransmissibility9498Systems Attached to Moving SupportSeismic Instruments101Elastically Supported DampedSystems106Damped Forced VibrationPeriodic Excitation109Transient Vibration-Shock Spectrum116Equivalent Viscous Damping122Summary129Problems131CHAPTER 4 SYSTEMS WITH MORE THAN ONE DEGREEOF FREEDOM4-14-2Introduction142Equations of Motion:Newton's Second Law143142
4-3 Undamped Free Vibration: PrincipalModes4-4 GeneralizedandCoupling4-5 Principal Coordinates1584-6 Modal Analysis:ient Vibrationof Undamped S1604-7Systems1654-8 Forced Vibration-Harmonic Excitation1754-9 Influence Coefficients1804-10Problems181169CHAPTER 5 METHODS FORNATURAL5-1 Introduction190Equation1905-21935-3 Rayleigh Method5-4Method1975-5 Transfer Matrix202Myklestad-Prohl Method5-7213ProblemsCHAPTER 6 DISCRETESYSTEMS6-1 Introduction2186-2 Equations of Motion-UndampedSystems6-3 UndampedVibration-PrincipalModes2236-4 Orthogonality and Principal CoordinatesCoordinates2296-56-6 Expansion Theorem230Quotient2316-76-8 Semidefinite Systems2326-9 Matrix Iteration2346-10 Undamped Forced238Vibration-Modal Analysis6-1 1 Systems with Proportional6-12 Orthogonality of Modes of Damped241Systems6-13 Damped Forced243Vibration-Modal Analysis226
Contents6-14 SummaryProblems245246CHAPTER 7 CONTINUOUS Introduction253ContinuousA Simple Exposition253Separation of the Timeand Space Variables256Problems Governed bythe Wave Equation258Longitudinal Vibration of Rods258Torsional Vibration of Shafts261Lateral Vibration of Beams262Rotary Inertia and Other Effects265Shear Deformation and RotaryInertia Effects266Effect of Axial Loading268The Eigenvalue Problem270Orthogonality272Boundary ConditionsIndependent of A273Boundary Conditions Dependenton A275Lagrange's Equations280Undamped ForcedVibration-Modal Analysis285Rayleigh's Quotient288Rayleigh-Ritz Method290Summary294Problems295CHAPTER 8 NONLINEAR SYSTEMS8-1 Introduction3008-2 Stability and Examples of NonlinearSystems3018-3 The Phase Plane3038-4 Stability of Equilibrium3068-5 Graphical Methods316Isocline Method317Pell's Method3193218-6 Self-excited Oscillations8-7 Analytical Methods323
Contents8-8Free Vibration323Perturbation Method323Variation of Parameter MethodBalance3278-9 Forced Vibration328Jump Phenomenon328Subharmonic Oscillation3328-10 Summary334Problems335325CHAPTER 9 SOLUTIONS BY DIGITAL sient One-degree-of-freedomSystems-Harmonic Response352N--degree-of-freedomSystems-Harmonic Response356Transient Response of UndampedDiscrete Systems360Rayleigh's Method-UndampedMultirotor Systems365Myklestad-Prohl Method-TransferMatrix Technique369Matrix Iteration-UndampedDiscrete Systems371Transient Response of Damped SystemsSummary380Problems385AAPPENDIX BAPPENDIX CDIndex376Elements of Matrix AlgebraLagrange's EquationsSubroutinesLinear Ordinary Differential Equationswith Constant Coefficients
PrefaceVibration isstudy of oscillatory motions. The ultimate goals ofthis study are to determine the effect of vibration on the performance andsafety of systems, and to control its effects. With the advent of high performance machines and environmental control, this study has become apart of most engineering curricula.text presents the fundamentals and applications of vibrationtheory. It is intended for students taking either a first course or a one-yearsequence in the subject at the junior or senior level. The student is assumedto have an elementary knowledge of dynamics, strength of materials, anddifferential equations, although summaries of several topics are included inthe appendices for review purposes. The format of its predecessor is retained, but the text material has been substantially rewritten. In view of thewidespread adoption of the International System of Units (SI) by the industrial world, SI units are used in the problems.The objectives of the text are first, to establish a sense of engineeringreality, second, to provide adequate basic theory, and finally, to generalizethese concepts for wider applications: The primary focus of the text is onthe engineering significance of the physical quantities, with the mathematical structure providing a supporting role. Throughout the text, examples ofapplications are given before the generalization to give the student a frameof reference, and to avoid the pitfall of overgeneralization. T o furtherenhance engineering reality, detailed digital computations for discrete systems are presented so that the student can solve meaningful numerical problems.The first three chapters examine systems with one degree of freedom.General concepts of vibration are described in Chapter 1. The theory of
xiiPrefacetime and frequency domain analysis is introduced in Chapter 2 through thestudy of a generalized model, consisting of the mass, spring, damper, andexcitation elements. This provides the basis for modal analyses in subsequent chapters. The applications in Chapter 3 demonstrate that the elements of the model are, in effect, equivalent quantities. Although the sametheory is used, the appearance of a system in an engineering problem maydiffer greatly from that of the model. The emphasis of Chapter 3 is on problem formulation. Through the generalization and classification of problemsin the chapter, a new encounter will not appear as a stranger.Discrete systems are introduced in Chapter 4 using systems with twodegrees of freedom. Coordinate coupling is treated in detail. Commonmethods of finding natural frequencies are described in Chapter 5. Thematerial in these chapters is further developed in Chapter 6 using matrixtechniques and relating the matrices to energy quantities. Thus, the studentwould not feel the artificiality in the numerous coordinate transformationsin the study.The one-dimensional wave equation and beam equation of continuous systems are discussed in Chapter 7. The material is organized to showthe similarities between continuous and discrete systems. Chapter 8, onnonlinear systems, explains certain common phenomena that cannot be predicted by linear theory. The chapter consists of two main parts, conformingto the geometric and analytical approaches tostudies.The digital computation in Chapter 9 is organized to follow thesequence of topics presented in the prior chapters and can be assigned concurrently with the text material. The programs listed in Table 9-1 are sufficient for the computation and plotting of results for either damped orundamped discrete systems. Detailed explanations are given to aid the student in executing the programs. The programs are almost conversationaland only a minimal knowledge of FORTRAN is necessary for their execution.The first five chapters constitute the core of an elementary,quarter terminal course at the junior level. Depending on the purpose of theparticular course, parts of Section 3-5 can be used as assigned reading. Sections 3-6 through 3-8, Section 4-9, and Sections 5-4 through 5-6 may beomitted without loss of continuity.For a one-semester senior or dual-level course, the instructor maywish to use Chapters 1 through 4, Chapter 6, and portions of Chapter 7 or8. Some topics, such as equivalent viscous damping, may be omitted.Alternatively, the text has sufficient material for a one-year sequenceat the junior or senior level. Generally, the first course in mechanical vibrations is required and the second is an elective. The material covered will givethe student a good background for more advanced studies.We would like to acknowledge our indebtedness to many friends,students, and colleagues for their suggestions, to the numerous writers who
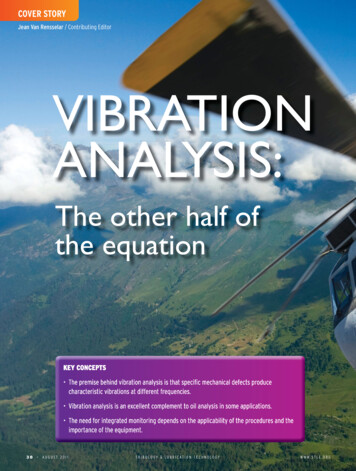
SEC. 1-5Vectorial Representation of Harmonic Motions13wr(a)representationFIG. 1-8.Harmonic motionsDisplacement, velocity, and acceleration vectors.Thus, each differentiation is equivalent to the multiplication of the vectorSince X is the magnitude of the vector X, is real, 1, eachbydifferentiation changes the magnitude by a factor of Since the multiplication of a vector by is equivalent to advancing it by a phase angle ofeach differentiation also advances a vector by 90".If a given harmonic displacement is costhe relations between the displacement and its velocity and acceleration areDisplacement XVelocity Acceleration cos-sin - These relations are identical to those shown in(1-4) to (1-6). Therepresentation of displacement, velocity, and acceleration by rotatingvectors is illustrated in Fig. 1-8. Since the given displacementis acosine function, or along the real axis, the velocity and acceleration mustbe along the real axis. Hence the real parts of the respective vectors givethe physical quantities at the given timeHarmonic functions can be added graphically be means of vectorandrepresenting the motionscos wt andaddition. The vectors a), respectively, are added graphically as shown in Fig.The resultant vector X has a magnitude cossinand a phase angle X,sincos
Introduction1-1 PRIMARYThe subject of vibration deals with the oscillatory motion of dynamicsystems. A dynamic system is a combination of matter which possessesmass and whose parts are capable of relative motion. All bodies possessing mass and elasticity are capable of vibration. The mass is inherent ofthe body, and the elasticity is due to the relative motion of the parts ofthe body. The system considered may be very simple or complex. It maybe in the form of a structure, a machine or its components, or a group ofmachines. The oscillatory motion of the system may be objectionable,trivial, or necessary for performing a task.The objective of the designer is to control the vibration when it isobjectionable and to enhance the vibration when ituseful, althoughvibrations in general are undesirable. Objectionable vibrations in amachinecause the loosening of parts, its malfunctioning, or itseventual failure. On the other hand, shakers in foundries and vibrators intesting machines require vibration. The performance of many instrumentsdepends on the proper control of the vibrational characteristics of thedevices.The primary objective of our study is to analyze the oscillatory motionof dynamic systems and the forces associated with the motion. Theultimate goal in the study of vibration is to determine its effect on theperformance and safety of the system under consideration. The analysisof the oscillatory motion is an important step towards this goal.Our study begins with the description of the elements in a vibratorysystem, the introduction of some terminology and concepts, and thediscussion of simple harmonic motion. These will be used throughout thetext. Other concepts and terminology will be introduced in the appropriate places as needed.
CHAP. 1Introduction1-2 ELEMENTS OF A VIBRATORY SYSTEMThe elements that constitute a vibratory system are illustrated in Fig.1-1. They are idealized and called (1) the mass, (2) the spring, (3) thedamper, and (4) the excitation. The first three elements describe thephysical system. For example, it can be said that a given system consistsof a mass, a spring, and a damper arranged as shown in the figure. Energymay be stored in the mass and the spring and dissipated in the damper inthe form of heat. Energy enters the system through the application of anexcitation. As shown in Fig. 1-1, an excitation force is applied to the massm of the system.The mass m is assumed to be a rigid body. It executes the vibrationsand can gain or lose kinetic energy in accordance with the velocity changeof the body. From Newton's law of motion, the product of the mass andits acceleration is equal to the force applied to the mass, and theacceleration takes place in the direction in which the force acts. Work isforce times displacement in the direction of the force. The work istransformed into the kinetic energy of the mass. The kinetic energyincreases if work is positive and decreases if work is negative.Th spring k possesses elasticity and is assumed to be of negligiblemass. spring force exists if the spring is deformed, such as the extensionor the compression of a coil spring. Therefore the spring force exists onlyif there is a relative displacement between the two ends of the spring. Thework done in deforming a spring is transformed into potential energy, thatis, the strain energy stored in the spring. A linear spring is one that obeysHooke's law, that is, the spring force is proportional to the springdeformation. The constant of proportionality, measured in force per unitdeformation, is called the stiffness, or the spring constant k.The damper c has neither mass nor elasticity. Damping force exists onlyif there is relative motion between the two ends of the damper. The workor the energy input to a damper is converted into heat. Hence thedamping element is nonconservatiue. Viscous damping, in which thedamping force is proportional to the velocity, is called linear damping.Viscous damping, or its equivalent, is generally assumed in cetDisplacementX1-1. Elements of a vibratory system.
SEC. 1-2Elements of a Vibratory SystemFIG. 1-2. A periodic motion.viscous dampingc is measured in force per unit velocity.Many types of nonlinear damping are commonly encountered. For example, the frictional drag of a body moving in a fluid is approximatelyproportional to the velocity squared, but the exact value of the exponentis dependent on many variables.Energy enters a system through the application of an excitation. Anexcitation force may be applied to the mass and/or an excitation motionapplied to the spring and the damper. An excitation forceapplied tothe mass m is illustrated in Fig.The excitation varies in accordancewith a prescribed function of time. Hence the excitation is always knownat a givenAlternatively, if the system is suspendeda support,excitation may be applied to the system through imparting a prescribedmotion tosupport. In machinery, excitation often arises from theunbalance of the moving components. The vibrations of dynamic systemsunder the influence of an excitation is called forced vibrations. Forcedvibrations, however, are often defined as the vibrations that are causedand maintained by a periodic excitation.If the vibratory motion is periodic, the system repeats its motion atequal time intervals as shown in Fig. 1-2. The minimum time required forthe system to repeat its motion is called a period which is the time tocomplete one cycle of motion. Frequency is the number of times that themotion repeats itself per unit time. A motion that does not repeat itself atequal time intervals is called an aperiodic motion.A dynamic system can be set into motion by some initial conditions, ordisturbances at time equal to zero. If no disturbance or excitation isapplied after the zero time, the oscillatory motions of the system arecalled free vibrations. Hence free vibrations describe the natural behavioror the natural modes of vibration of a system. The initial condition is anenergy input. If a spring is deformed, the input is potential energy. If amass is given an initial velocity, the input is kinetic energy. Hence initialconditions are due to the energy initially stored in the system.If the system does not possess damping, there is no energy dissipation.Initial conditions would cause the system to vibrate and the free vibrationof an undamped system will not diminish with time. If a system possesses
IntroductionCHAP.damping, energy will be dissipated in the damper. Hence the free vibrations will eventually die out and the system then remain at its staticequilibrium position. Since the energy stored is due to the initial conditions,free vibrations also describe the natural behavior of the system as itrelaxes from the initial state to its static equilibrium.For simplicity, lumped masses, linear springs, and viscous dampers willbe assumed unless otherwise stated. Systems possessing these characteristics are called linear systems. An important property of linear systems isthat they follow the principle of superposition. For example, the resultantmotion of the system due to the simultaneous application of two excitations is a linear combination of the motions due to each of the excitationsacting separately. The values of m, c, and k of the elements in Fig. 1-1are often referred to as the system parameters. For a given problem, thesevalues are assumed time invariant. Hence the coefficients or the parameters in the equations are constants. The equation of motion of the systembecomes a linear ordinary differential equation with constant coefficients,which can be solved readily.Note that the idealized elements in Fig. 1-1 form a model of a vibratorysystem which in reality can be quite complex. For example, a coil springpossesses both mass and elasticity. In order to consider it as an idealizedspring, either its mass is assumed negligible or an appropriate portion ofits mass is lumped together with the other masses of the system. Theresultant model is a lumped-parameter, or discrete, system. For example, abeam has its mass and elasticity inseparably distributed along its length.The vibrational characteristics of a beam, or more generally of an elasticbody or a continuous system, can be studied by this approach if thecontinuous system is approximated by a finite number of lumped parameters. This method is a practical approach to the study of some verycomplicated structures, such as an aircraft.In spite of the limitations, the lumped-parameter approach to the studyof vibration problems is well justified for the following reasons. (1) Manyphysical systems are essentially discrete systems. (2) The concepts can beextended to analyze the vibration of continuous systems. (3) Manyphysical systems are too complex to be investigated analytically as elasticbodies. These are often studied through the use of their equivalentdiscrete systems. (4) The assumption of lumped parameters is not toreplace the basic understanding of a problem, but it simplifies the analytical effort and renders a technique for the computer solution.So far, we have discussed only systems with rectilinear motion. Forsystems with rotational motions, the elements are (1) the mass moment ofinertia of the body J, (2) the torsional spring with spring constantand(3) the torsional damper with torsional damping coefficientAn angularis analogous to a rectilinear displacement x, and andisplacementexcitation torqueis analogous to an excitation forceThe twotypes of systems are compared as shown in Table 1-1. The comparison is
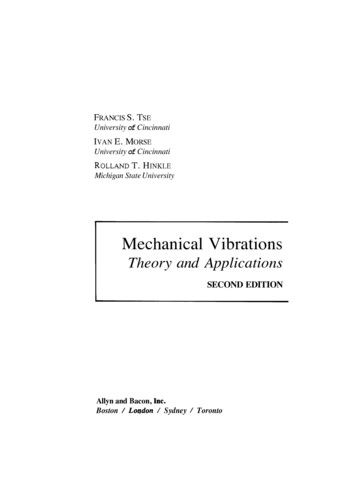
SEC. 1-3Examples of Vibratory MotionsT A BLEComparisonRotational SystemsofRECTILINEARandROTATIONALSpring torque Spring force kxdxDamping force c -Inertia force Rectilineardt.Damping torque c,dtInertia dtshown in greater detail in Tables 2-2 and 2-3. It is apparent from thecomparison that thp concept ofsystems can be extended easilysystems.1-3OFMOTIONSTo illustrate different types of vibratory motion, let us choose variouscombinations of the four elements shown in Fig. 1-1 to form-simpledynamic systems.The spring-mass system of Fig.serves to illustrate the case ofundamped free vibration. The massis initially at rest at its staticequilibrium position. It is acted upon by two equal and opposite forces,namely, theforce, which is equal to the product of the springconstant k and the static deflectionof the spring, and the gravitationalforce mg due to the weight of the mass m. Now assume that the mass isand then released with zerodisplaced from equilibrium by an amountinitial velocity. As shown in the free-body sketch, at the time the mass isreleased, the spring force is equal toThis is greater than theUpon being released,gravitational force on the mass by the amountthe mass will move toward the equilibrium position.Since the spring is initially deformed byfrom equilibrium, thecorresponding potential energy is stored in the spring. The system isconservative because there is no damper to dissipate the energy. Whenthe mass moves upward and passes through equilibrium, the potentialenergy of the systemThus, the potential energy is transformed tobecome the kinetic energy of the mass. As the mass moves above theequilibrium position, the spring is compressed and thereby gaining potential energy'from the kinetic energy of the mass. When the mass is at itsuppermost position, its velocity is zero. All the kinetic energy of the masshas been transformed to become potential energy. Through the exchangeof potential and kinetic energies between the spring and the mass, thesystem oscillates periodically at its natural frequency about its static
Free lengthof springFree-bodysketchStaticStaticposition0t(a) Undamped free vibration( b ) Damped free vibrationForced vibrationFIG. 1-3. Simple vibratory systems.equilibrium position. Hence natural frequency describes the rate ofenergy exchange between two types of energy storage elements, namely,the mass and the spring.It will be shown in Chap. 2 that this periodic motion is sinusoidal orsimple harmonic. Since the system is conservative, the maximum displacement of the mass from equilibrium, or theof vibration, will notdiminish 'from cycle to cycle. It is implicit in this discussion that thenatural frequency is a property of the system, depending on the values ofm and k. It is independent of the initial conditions or the amplitude of theoscillation.A mass-spring system with damping is shown in Fig.The massat rest is under the influence of the spring force and the gravitationalforce, since the damping force is proportional to velocity. Now, if themass is displaced by an amount from its static equilibrium position andthen released with zero initial velocity, the spring force will tend torestore the mass to equilibrium as before. In addition to the spring force,however, the mass is also acted upon by the damping force which opposesits motion.resultant motion depends on the amount of damping inthe system. If the damping is light, the system is said to be underdampedthe motion is oscillatory. The presence of damping will cause (1) theeventual dying out of the oscillation and (2) the system to oscillate moreslowly than without damping. In other words, the amplitude
SEC. 1-3Examples of Vibratory Motionswith each subsequent cycle of oscillation, and the frequency of vibrationwith viscous damping is lower than the undamped natural frequency. Ifthe damping is heavy, the motion is nonoscillatory, and the system is saidThe mass, upon being released, will simply tend toto bereturn to its static equilibrium position. The system is said to be criticallydamped if the amount of damping is such that the resultant motion is onthe border line between the two cases enumerated. The free vibrations ofthe systems shown in Figs.and (b) are illustrated in Fig. 1-4.Ail physical systems possess damping to a greater or a lesser degree.When there is very 'little damping in a system, such as a steel structure or asimple pendulum, the damping may be negligibly small. Most mechanicalsystems possess little damping and can be approximated as undampedsystems. Damping is often built into a system to obtain the desiredperformance. For example, vibration-measuring instruments are oftenbuilt with damping corresponding to 70 percent of the critically dampedvalue.If an excitation force is applied to the mass of the system as shown inthe resultant motion depends on the initial conditions as wellFig.as the excitation. In other words, the motion depends on the manner bywhich the energy is applied to the system. Let us assume that theexcitation is sinusoidal for this discussion. Once the system is set intomotion, it will tend to vibrate at its natural frequency as well as to followtheof the excitation. If the system possesses damping, the partof the motion not sustained by the sinusoidal excitation will eventually dieout. This is the transient motion, which is at the natural frequency of thesystem, that is, the oscillation under free vibrations.The motion sustained by the sinusoidal excitation is called the steadystateor the steady-state response. Hence the steady-state response must be at the excitation frequency regardless of the initialF I G . 1-4. Free vibration of systems shown in Figs.displacement initial velocity 0 .and ( b ) .
8conditions or the natural frequency of the system. It will be shown inChap. 2 that the steady-state response is described by the particularintegral and the transient motion by the complementary function of thedifferential equation of the system.Resonance occurs when the excitation frequency is equal to the naturalfrequency of the system. No energy input is needed to maintain thevibrations of an undamped system at its natural frequency. Thus, anyenergy input will be used to build up the amplitude of the vibration, andthe amplitude at resonance of an undamped systemincrease withoutlimit. In a system with damping, the energy input is dissipated in thedamper. Under steady-state condition, the net energy-input per cycle isequal to the energy dissipation per cycle. Hence theofvibration at resonance for systems with damping is Mite, and it isdetermined by the amount of damping in the system.1-4 SIMPLE HARMONIC MOTIONSimple harmonic motion is the simplest form of periodic motion. It willbe shown in later chapters that (1) harmonic motion is also the basis formore complex analysis using Fourier technique, and (2) steady-stateanalysis can be greatly simplified using vectors to represent harmonicmotions. We shall discuss simple harmonic motions and the manipulationof vectors in some detail in this section.A simple harmonic motion is a reciprocating motion. It can be represented by the circular functions, sine or cosine. Consider the motion ofIf the distance OP isthe point P on the horizontal axis of Fig.OP X coswhere t time, constant, and X constant, the motion of P about theis sinusoidal or simple harmonic.* Since the circular functionoriginradians, a cycle of motion is completed when repeats itself in* A sine, a cosine, or their combination can be used to represent a simple harmonicmotion. For example, let wtcos awssin a ) X a)where X and a It is apparent that the motionis sinusoidaland, therefore, simple harmonic. For simplicity, we shall confine our discussion to a cosinefunction.indicates thatis a function of time Since this is implicit in theIn Eq.equation, we shall omit (t) in all subsequent equations.
Harmonic Motion1-4FIG. 1-5.Simple harmonic motion:X costhat is,Period -1- -Frequencyor Hz*7is called the circular frequency measured inIfrepresents the displacement of a mass in a vibratory system, thevelocity and the acceleration are the first and the second time derivativesthe displacement,? that is,Displacement x X cosVelocity x Acceleration -sincos 90") (1-6)These equations indicate that the velocity and acceleration of a harmonicdisplacement are also harmonic of the same frequency. Each differentiation changes the amplitude of the motion by a factor ofand the phaseangle of the circular function byThe phase angle of the velocity is90" leading the displacement and the acceleration isleading thedisplacement.Simple harmonic motion can be defined by combining Eqs. (1-4) and(1-6).-wherea constant. When the acceleration of a particle with rectilinear motion is always proportional to its displacement from a fixedpoint on the path and is directed towards the fixed point, the particle issaid to have simple harmonic motion. It can be shown that the solution ofEq. (1-7) has the form of a sine and a cosine function with circularfrequency equal to w.* In 1965, the Institute of Electrical and Electronics Engineers, Inc. (IEEE) adopted newstandards for symbols and abbreviation (IEEE Standard No. 260). The unit :hertz (Hz)(cps) for frequency. Hz is now commonly used in vibration studies.replacessymbo
Con tents Preface xi CHAPTER1 INTRODUCTION 1-1 Primary Objective 1 1-2 Elements of a Vibratory System 2 1-3 Examples of Vibratory Motions 5 1-4 Simple Harmonic Motion 1-5 Vectorial Representation of Harmonic Motions 11 1-6 Units 16 1-7 Summary 19 Problems 20 CHAPTER 2 SYSTEMS WITH ONE DEGREE OF FREEDOM-THEORY 2-1 Introduction 23 2-2 Degrees of Freedom 25 2-3 Equation of Motion-Energy Method 27