Transcription
ENE 2XX: Renewable Energy Systems and ControlLEC 06 : Combined Design & Control ofa Fuel Cell Bus via Convex ProgrammingWork by Dr. Xiaosong Hu*, Dr. Nikolce Murgovski, Prof. Bo EgardtSwedish Hybrid Vehicle CenterChalmers University of Technology*Dr. Xiaosong Hu now Professor at Chongqing UniversityProfessor Scott MouraUniversity of California, BerkeleySummer 2017Prof. Moura Tsinghua-Berkeley Shenzhen InstituteENE 2XX LEC 06 - FCHV Design & ControlSlide 1
Fuel Cell Hybrid VehiclesAC Transit HyRoad Fuel Cell Bus2016 Toyota MiraiProf. Moura Tsinghua-Berkeley Shenzhen InstituteENE 2XX LEC 06 - FCHV Design & ControlSlide 2
How Fuel Cells WorkH2 2H 2e ,E 0VProf. Moura Tsinghua-Berkeley Shenzhen Institute12O2 2H 2e H2 O,ENE 2XX LEC 06 - FCHV Design & ControlE 1.23VSlide 3
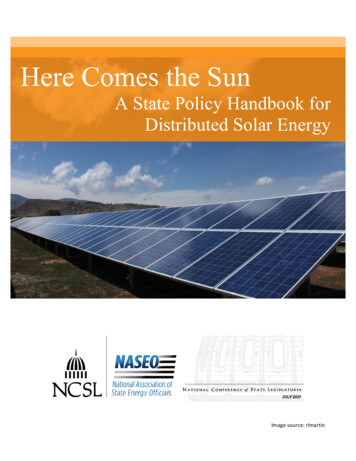
Fuel Cell Hybrid PowertrainFigure: Fuel cell hybrid powertrain. The vehicle is propelled by an electric machine(EM), which obtains energy from a fuel cell system (FCS), or an electric buffer(battery or supercapacitor). When EM operates as a generator, mechanical energyfrom the wheels is converted to (and stored as) electrical energy in the buffer.Prof. Moura Tsinghua-Berkeley Shenzhen InstituteENE 2XX LEC 06 - FCHV Design & ControlSlide 4
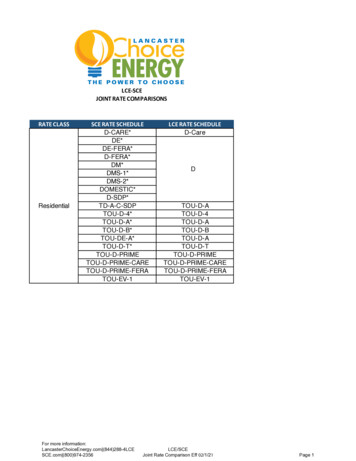
Bus Line Velocity and Road GradeFigure: Model of a bus line, expressed by demanded vehicle velocity and roadaltitude. The initial and final velocities and road altitudes, respectively, are equal,thus conserving kinetic and potential energy of the vehicle.Prof. Moura Tsinghua-Berkeley Shenzhen InstituteENE 2XX LEC 06 - FCHV Design & ControlSlide 5
Research QuestionGiven a fixed bus line (i.e. velocity-road grade profile), optimizeFuel cell & super capacitor component sizesEnergy management strategy for power-splitto minimize operating (hydrogen fuel) component (FC SC) costsUnique FeaturesComponent sizes are static design variables (not time-varying)Energy management strategy is a multi-stage control process(time-varying)Prof. Moura Tsinghua-Berkeley Shenzhen InstituteENE 2XX LEC 06 - FCHV Design & ControlSlide 6
Optimization FrameworkFigure: Optimization framework for simultaneous component sizing and energymanagement of a hybrid city bus. After user inputs are provided, the combinedoperational and components cost are minimized simultaneously, in order to obtainthe optimal power split control and sizes of powertrain components.Prof. Moura Tsinghua-Berkeley Shenzhen InstituteENE 2XX LEC 06 - FCHV Design & ControlSlide 7
Optimization Problemminimizesubject to:Operation Component CostDriving cycle constraints,Energy conversion and balance constraints,Buffer dynamics,Physical limits of components,.(For all time instances along the bus line).Prof. Moura Tsinghua-Berkeley Shenzhen InstituteENE 2XX LEC 06 - FCHV Design & ControlSlide 8
Useful Properties of Convex FunctionsThe function f is said to be concave if f is convex.An affine function h(x) qx r is both concave and convex.A quadratic function f (x) qx2 px r with domain f R is convex ifq 0.A quadratic-over-linearfunction f (x, y) x2 /y with 2dom f (x, y) R y 0 is convex.The geometric mean f (x, y) is concave. xy with dom f (x, y) R2 x, y 0A nonnegative weighted sum f functions fi , is a convex function.Pwi fi , with wi 0, of convexA product f (x, y) xy is generally not a convex function.Prof. Moura Tsinghua-Berkeley Shenzhen InstituteENE 2XX LEC 06 - FCHV Design & ControlSlide 9
Optimization VariablesTM (t )PFe (t )sFsBEB ( t )PB ( t )Motor torque [Nm]Fuel cell electric power [kW]Fuel cell scale factor [-]Buffer (supercap) scale factor [-]Buffer (supercap) energy [kWh]Buffer (supercap) power [kW]Ultimately, must prove CP w.r.t. these optimization varsmins. tof (x)g(x) 0h(x) 0wheref (x) is a convex function of x over the feasible setg(x) is a convex function of x over the feasible seth(x) is an affine function of x over the feasible setProf. Moura Tsinghua-Berkeley Shenzhen InstituteENE 2XX LEC 06 - FCHV Design & ControlSlide 10
Longitudinal Vehicle DynamicsNewton’s Second Law, Electric Machine Torque:Tdem (sF , sB , t ) JV m(sF , sB ) m(sF , sB )cr RwrfgR2w2rfg!ω̇M (t) ρair Af cd R3w32rfgg cos α(t ) m(sF , sB )2ωM(t )Rwrfgg sin α(t )Vehicle Mass:m(sF , sB ) m0 sF mF sB mBProf. Moura Tsinghua-Berkeley Shenzhen InstituteENE 2XX LEC 06 - FCHV Design & ControlSlide 11
Electric Motor2PM (TM , t ) a0 (ωM ) a1 (ωM ) · TM (t ) a2 (ωM ) · TM(t)a2 (ωM ) 0,Prof. Moura Tsinghua-Berkeley Shenzhen Institute ωMENE 2XX LEC 06 - FCHV Design & ControlSlide 12
Fuel CellPFf (PFe , sF ) b0 sF b1 · PFe (t ) b2 ·P2Fe (t )sF0 PFe (t ) sF PFe,maxProf. Moura Tsinghua-Berkeley Shenzhen InstituteENE 2XX LEC 06 - FCHV Design & ControlSlide 13
SupercapacitorEnergy Storage DynamicsĖB (t ) PB (t )Resistive LossesPB,loss (PB (t ), EB (t )) RC P2B (t )2 EB (t )The SC energy level EB (t ) is related to the number of SC cells sB n0 andCV 2 (t )voltage V (t ) according to EB (t ) 2 sB n0 . Both pack energy, cell voltage,and electric current are limited according to0 EB ( t ) rimin2n0C2CVmax2rEB (t )sB PB (t ) imaxs B n02n0CEB (t )sBKEY STEP: Show these produce convex ineq. constraints, using convex fcnpropertiesProf. Moura Tsinghua-Berkeley Shenzhen InstituteENE 2XX LEC 06 - FCHV Design & ControlSlide 14
Conservation of Power(Fuel Cell) (Buffer) - (Losses) - (Aux Load) (Motor)PFe PB PB,loss (PB , EB ) PA PM (TM , t )PFe PB RC P2B2 EB PA a0 (ωM ) a1 (ωM )TM a2 (ωM )TM2This is NOT affine in the decision variables!Consider the “convex relaxation”PFe PB RC P2B2 EBProf. Moura Tsinghua-Berkeley Shenzhen Institute PA a0 (ωM ) a1 (ωM )TM a2 (ωM )TM2ENE 2XX LEC 06 - FCHV Design & ControlSlide 15
Objective FunctionMinimize operational cost (consumed hydrogen) and component costs (FCand SC)ZtfPFf (PFe (t ), sF )dt wF sF wB sBJ(TM (t ), PFe (t ), sF , sB , EB (t ), PB (t )) wh0Prof. Moura Tsinghua-Berkeley Shenzhen InstituteENE 2XX LEC 06 - FCHV Design & ControlSlide 16
Objective FunctionMinimize operational cost (consumed hydrogen) and component costs (FCand SC)ZtfPFf (PFe (t ), sF )dt wF sF wB sBJ(TM (t ), PFe (t ), sF , sB , EB (t ), PB (t )) wh0subject to:Longitudinal Vehicle DynamicsElectric Motor Constraint EquationsFuel Cell Constraint EquationsSupercapacitor Constraint EquationsProf. Moura Tsinghua-Berkeley Shenzhen InstituteENE 2XX LEC 06 - FCHV Design & ControlSlide 16
Objective FunctionMinimize operational cost (consumed hydrogen) and component costs (FCand SC)ZtfPFf (PFe (t ), sF )dt wF sF wB sBJ(TM (t ), PFe (t ), sF , sB , EB (t ), PB (t )) wh0subject to:Longitudinal Vehicle DynamicsElectric Motor Constraint EquationsFuel Cell Constraint EquationsSupercapacitor Constraint EquationsMust show:Obj. Fcn. is convex w.r.t. design variablesInequality Fcns are all convex w.r.t. design variablesEquality Fcns are all affine w.r.t. design variablesProf. Moura Tsinghua-Berkeley Shenzhen InstituteENE 2XX LEC 06 - FCHV Design & ControlSlide 16
Prof. Moura Tsinghua-Berkeley Shenzhen InstituteENE 2XX LEC 06 - FCHV Design & ControlSlide 17
Optimal Results - IProf. Moura Tsinghua-Berkeley Shenzhen InstituteENE 2XX LEC 06 - FCHV Design & ControlSlide 18
Optimal Results - IIProf. Moura Tsinghua-Berkeley Shenzhen InstituteENE 2XX LEC 06 - FCHV Design & ControlSlide 19
SummaryOptimize component sizes (design) and energy management (control)of fuel cell city busEnormously complicated problemTHE SECRET: convex model formulationSolutions in less than 10sec rapid design iterationThis is just the beginning.Prof. Moura Tsinghua-Berkeley Shenzhen InstituteENE 2XX LEC 06 - FCHV Design & ControlSlide 20
Prof. Moura Tsinghua-Berkeley Shenzhen InstituteENE 2XX LEC 06 - FCHV Design & ControlSlide 21
Additional Reading[1]. X. Hu, L. Johannesson, N. Murgovski, B. Egardt. “Longevity-consciousdimensioning and power management of a hybrid energy storagesystem for a fuel cell hybrid electric bus”. Journal of Applied Energy,2014, doi:10.1016/j.apenergy.2014.05.013.[2]. X. Hu, N. Murgovski, L. Johannesson, and B. Egardt, “Comparison ofthree electrochemical energy buffers applied to a hybrid bus powertrainwith simultaneous optimal sizing and energy management,” IEEETransactions on Intelligent Transportation Systems, vol. 15, no. 3, pp.1193-1205, June 2014. doi:10.1109/TITS.2013.2294675[3]. B. Egardt, N. Murgovski, M. Pourabdollah, L. Johannesson.“Electromobility studies based on convex optimization: design andcontrol issues regarding vehicle electrification”. IEEE Control SystemsMagazine, vol. 34, no. 2, pp. 32-49, 2014,doi:10.1109/MCS.2013.2295709.Prof. Moura Tsinghua-Berkeley Shenzhen InstituteENE 2XX LEC 06 - FCHV Design & ControlSlide 22
An affine function h(x) qx r is both concave and convex. A quadratic function f(x) qx2 px r with domain f R is convex if q 0. A quadratic-over-linear function f(x;y) x2 y with dom f (x;y) 2R2 jy 0 is convex. The geometric mean f (x;y) p xy with dom f x;y) 2R2 jx;y 0 is concave. A nonnegative weighted sum f P w if i, with w i .