Transcription
CHAPTER XTIRAMISU EUROPEAN PROJECT: DESIGN ANDIMPLEMENTATION OF TOOLS FORHUMANITARIAN DEMININGHÉCTOR MONTES1, 2, ROEMI FERNÁNDEZ1 y MANUEL ARMADA1Centro de Automática y Robótica CAR (CSIC-UPM); 2Facultad de Ingeniería Eléctrica – Universidad Tecnológica de Panamáhector.montes@csic.es1This paper presents the most relevant results of the work done within theframework of TIRAMISU European project (Toolbox Implementation forRemoval of Anti-personnel Mines, Submunitions and UXO), by the Centrefor Automation and Robotics CAR (CSIC-UPM). This project has beenfunded by European Union within the Seventh Framework Programme ofR&D. In general, the works carried out during this project, currently in effect, have been the design and development of tools for training in searchof landmines and other for locating anti-personnel landmines, such as: design and validation of e-tutors for land impact and non-Technical Surveytools, and landmines identification for training of trainee, who will collaborate in humanitarian demining tasks; design and implementation of atraining tool to be used with compact metal detectors; design, implementation and evaluation of an intelligent prodder training tool for close-in detection of buried landmines; development of a semi-autonomous and teleoperated system for search and detection of anti-personnel mines, whichconsists of a hexapod robot and a scanning manipulator arm, that carries ametal detector at its end-effector.1 IntroductionAccording to the Geneva International Centre for Humanitarian Demining(GICHD): “In a study of over 15 different programmes in 2004 it wasfound that of 292 km2 of land that had physically been cleared, less than
2Results from European Projects on Robotics2.5% of the area proved to be actually contaminated with landmines.”These statistics underscore known inefficiencies within the mine actionsector in the targeting of clearance resources, where too much land remainssubject to full clearance (GICHD, 2009). In order to deal with this problem, land release of landmines has evolved over the years. However, stillmuch work to do to contribute in solving this problem.As every situation is different, it is impossible to provide one solutionthat fits all needs. Therefore, the TIRAMISU Project1 will concentrate ondeveloping components or building blocks, which can be directly used bythe demining managers when planning Mine Actions, from area reductionto effective mine clearance. For this reason the main objective ofTIRAMISU is to provide tools that for the following actions: Improve the overall efficiency and cost-effectiveness of humanitarian clearing of anti-personnel landmines and cluster munitions fromlarge civilian areas Be integrated into a coherent and adaptable toolbox of mineclearing activities Be validated by users in the landmine field Be backed by appropriate training and supportIn general the TIRAMISU Project has been divided in ten different modules for addressing with the objectives proposed. In this case, the Centrefor Automation and Robotics CAR (CSIC-UPM) has been involved withintwo modules, which are: Module 4, Ground-based Close-in Detection; andModule 8, Training of End-Users, Mine Action Centres, R&D communityand Key Staff. The aim of the first one includes tools to precisely detectand localise mines, sub-munitions or explosives at close range with orwithout – remotely controlled or manned ground/air mechanical assistance.The second includes training tools aiming to enhance the knowledge generated by the project and improve the professional development of theR&D and (industrial) manager’s community. It also lists the TIRAMISUtraining tools developed in the other modules.This chapter presents the main works carried out by the CAR team, specifically the Field and Service Robotics Group, within the framework ofthe TIRAMISU European Project funded by European Union within theSeventh Framework Programme of R&D. This manuscript has been divided in six different sections, the first is a briefly introduction about the callof the GICHD in order to work in counter the landmines and the main objectives of the TIRAMISU project. Section 2 describes the design and im1http://www.fp7-tiramisu.eu/
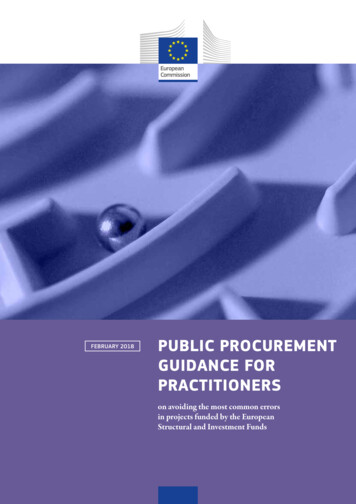
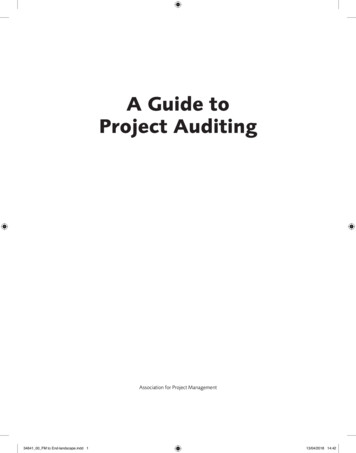
TIRAMISU EUROPEAN PROJECT: DESIGN AND IMPLEMENTATION OFTOOLS FOR HUMANITARIAN DEMINING 3plementation of a training tool to improve the use with compact metal detectors in order to increase the efficiency during the searching o landmines.Afterwards, Section 3 presents the design, implementation and evaluationof an intelligent prodder for training about close-in detection tasks. Fortraining in Humanitarian Demining (HUDEM), two e-Tutors have beendesigned by the CAR and validated by means of experts; a summary ofthis is presented in Section 4. The development of a semi-autonomous andtele-operated system for search and detection of anti-personnel landminesis shown in Section 5. Finally, in Section 6 a short conclusion of this workhas been written.2 Design and implementation of a training tool to be usewith compact metal detectorsOne of the first works developed within the framework of the TIRAMISUproject has been the design and implementation of a training tool to improve the use of handheld metal detectors (HHD) for applications in humanitarian demining. The main idea is based in provide a best training tothe apprentices, who start in the humanitarian demining cooperation. Thistraining tool consists of two parts, which are: (i) a graphical user interface(GUI), and (ii) a sensory tracking system installed on the HHD (Fernándezet al., 2012; Fernández et al., 2013; Fernández et al., 2014a).The HHD used for this training tool has been the compact detector forspecial tasks VMC1 Mine Detector manufactured by Vallon (Vallon,2012). However, this tool can be installed in any other metal detector, dueits modularity and flexibility of use.Previous to the training of apprentices was carried out a study of the expert’s skills in the use of HHD to search anti-personnel landmines, byquantifying some critical performance variables, e.g., scanning speed, distance between the sensor head and the soil, inclination of the sensor head,advance step, others. These variables formed a data base that is an important part of the mentioned training tool, and besides used for the evaluation of the trainees.Fig. 1 shows the compact metal detector (VMC1 by Vallon), instrumented with two motion trackers (inertial measurement units) and an operator carrying out an experimental test in outdoor at the Centre for Automation and Robotics (CSIC-UPM), Arganda del Rey, Madrid.
4Results from European Projects on RoboticsFig. 1. (a) Compact metal detector with sensory system. (b) Apprentice withHHD training tool during an experimental test at CSIC premises.Fig. 2 shows the Graphical User Interface implemented in Matlab ,which performs monitoring of the activities carried out by the apprenticesusing the HHD during the training process. As may be seen in Fig. 2, theGUI is divided into six sections, which are: (1) Session info, which contains three different elements for identify the user; (2) Initializations, withthis section the configuration is initialised; (3) Controls, it used in order tostarting the interface activities; (4) Sweep Monitoring, for the reconstruction in real time of sweeping motion of the HHD carried out by the operator; (5) Speed, Height and Inclination Data, variables used to help the instructor to supervise the activity of the trainee; (6) Export Data, used tosave the current data and to evaluate the performance of the apprentice.
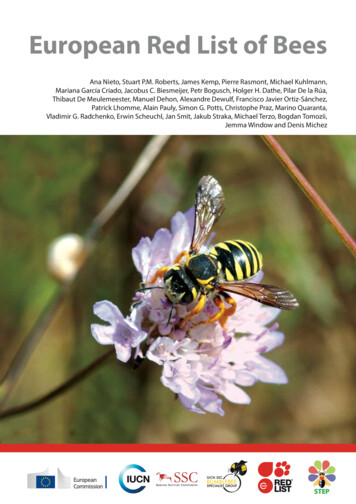
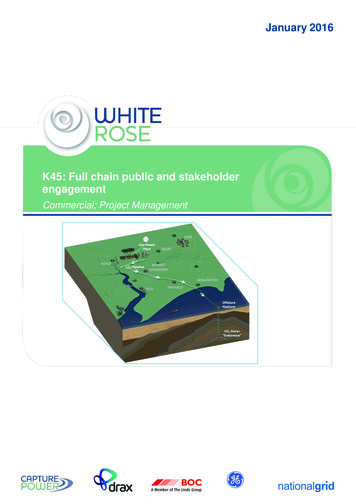
TIRAMISU EUROPEAN PROJECT: DESIGN AND IMPLEMENTATION OFTOOLS FOR HUMANITARIAN DEMINING 5Fig. 2. Graphical User Interface implemented in Matlab.3 Design, implementation and evaluation of an intelligentprodder for trainingOther works carried out in this European Project by the CAR group hasbeen the design, implementation and evaluation, in lab conditions, of anintelligent prodder for training tasks for close-in detection of buried antipersonnel landmines. The objective of this training tool is to provide information about the amount of force exerted and the insertion tilt in thesoil of the prodder when the trainees carry out tests of searching of buriedlandmines. Some visual alarms (subsequently, sound alarms) are established when the force and inclination variables reach certain limits predetermined during the training process. In (Fernández et al, 2014b; Fernández et al, 2015a) the design and implementation of this training tool areshown, besides of some experimental results. Fig. 3 shows a block diagram
6Results from European Projects on Roboticswhich illustrates the concept of use of the instrumented prodder, and onecurrent picture of the intelligent prodder designed and manufactured byCAR.(a)(b)Fig. 3. (a) Block diagram of the intelligent prodder showing the different modules that compose it. (b) Intelligent feedback prodder.This intelligent prodder designed by CAR-CSIC consists of a NoNMagnetic Prodder (Vallon, 2012), an inertial measurement unit (IMU), anda force sensor. The characteristics of the non-magnetic prodder deviceconsiders the technical requirements specified by GICHD in terms of size,mass, non-magnetic features, conforming to STANAG 2897 standard, andother. The IMU is used to measure the pitch, roll and yaw of the insertion
TIRAMISU EUROPEAN PROJECT: DESIGN AND IMPLEMENTATION OFTOOLS FOR HUMANITARIAN DEMINING 7of the prodder in the soil. The force sensor is able to provide force signalin only the direction of the prodder needle, which is enough in this case.Fig. 4. GUI for the Intelligent feedback prodder.On the other hand, a graphical user interface has been designed to beused with the intelligent prodder, in order to show to the trainee and thesupervisor the results of the training in real time. In addition, this GUI is incharge of collecting the data acquired by the sensors installed on instrumented prodder, processing, analysing and monitoring the measured performance variables, and presenting the essential information required during the training sessions, as has been mentioned above, includingactivation of relevant alarms when at least one of the following conditionsis achieved: (i) the operator exceeds a pre-set maximum force, and (ii) theangle of insertion of the prodder exceeds 45º. These conditions are essential to avoid the imminent explosion of the landmines during a real task ofdemining. In Fig. 4 the GUI for the instrument prodder is shown.
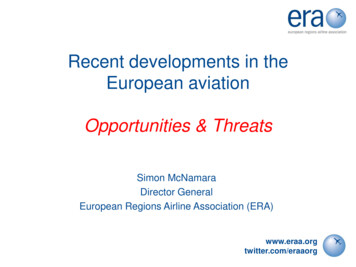
8Results from European Projects on Robotics4 Design and validation of e-Tutors for training in HUDEMIn the present, the modern education is also based in electronic learning,known as e-learning. This is due to the progress in the information andcommunications technology (Mellar et al, 2007; Wu et al, 2006). Consequently, this project uses this concept in order to teach several importantconcepts to the learners in humanitarian demining courses, by means of etutors.The CAR has designed two different e-tutors to teach, support, manage,and assess to the apprentices in some areas about humanitarian deminingprogramme, established in Mine Action Centres of some countries affectedwith landmine fields after the armed conflicts. The first e-tutor that hasbeen designed and validated is titled “e-Tutor for Advanced General Survey and Non-Technical Survey”, and the second e-tutor developed is titled“e-Tutor for Antipersonnel Landmines Identification” (Montes et al,2015). Both e-tutors consist of several sections (sub-e-Tutors), which areconsidered great help for the basic learning in the areas for they were designed.Fig. 5. Main page and other pages of the AGS and NTS e-Tutor.The teaching programme of the first e-tutor has been developed to support capacity building and on the job training at Mine Action Centres inorder to improve the required knowledge to manage in a proficient and effective manner all the different tools generated by the TIRAMISU projectfor Advanced General Survey (AGS) and Non-Technical Survey (NTS)tasks. Therefore, this e-tutor is aimed at all those that are part of the MineAction Community and the operational personnel that would like to be introduced in the use of the new AGS and NTS tools generated within the
TIRAMISU EUROPEAN PROJECT: DESIGN AND IMPLEMENTATION OFTOOLS FOR HUMANITARIAN DEMINING 9framework of the TIRAMISU project. Fig. 5 shows the main page of thise-tutor and two additional pages related with the status of the trainee andone question of the final test for the assessment of the student.Fig. 6. Main page of two sub-e-Tutors and video slides of two landmines.The second e-tutor has been developed in order to be used in Mine Action Centres from countries who need it. The idea is provide an initialtraining for civilian people that need to learn about of the identification inanti-personnel landmines, and that require preparing to work in this activity. The training can be realized in any time and in any place, because thebase of the information is through of the electronic learning. This e-tutorconsists of sub-e-tutors, which are: (i) General description of the antipersonnel mines, (ii) Description of the common demining methods, (iii) Description of the PMA-1 landmine, (iv) Description of the Valmara 69landmine, (v) Description of the VS-50 landmine, and (vi) Description ofthe PPM-2 landmine.
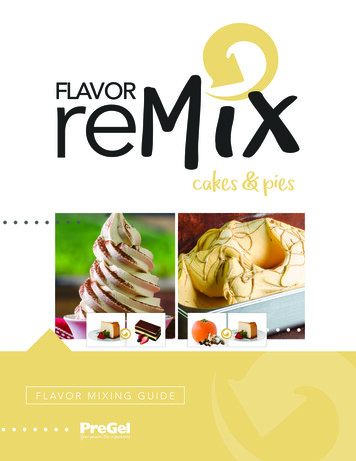
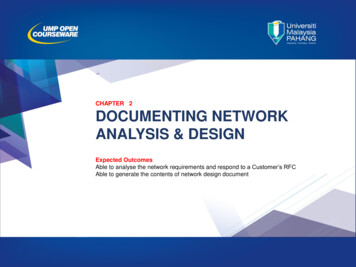
10Results from European Projects on Robotics5 Development of a semi-autonomous and tele-operatedsystem for search and detection of anti-personnellandminesThe semi-autonomous and tele-operated system developed by the CARCSIC-UPM has been a hexapod legged robot with a scanning manipulatorarm, which is used for search and detection anti-personnel landmines within the framework of TIRAMISU European project. The idea of using legged robots for humanitarian demining has been developed about the last 20years, and several prototypes of these robots have been tested experimentally, under environments controlled. Some examples of these robotic platforms are TITAN VIII (Hirose & Kato, 1998), AMRU-2 (Habumuremyi etal, 1998), RIMHO2 (Gonzalez de Santos & Jimenez, 1995), COMET series (Nonami et al, 2003), SILO6 (Gonzalez de Santos et al, 2002;Gonzalez de Santos et al, 2007), and other. The last one has been designedby IAI-CSIC within the framework of DYLEMA project.Fig. 7. Hexapod walking robot and scanning manipulator arm.The hexapod robot designed by the CAR has a control architecture thatconsists of an on-board computer, control cards, data acquisition boards,power cards, signals conditioning cards, positioning sensors, DC motors,Wi-Fi communication system, DGPS, batteries, and other devices and ac-
TIRAMISU EUROPEAN PROJECT: DESIGN AND IMPLEMENTATION OFTOOLS FOR HUMANITARIAN DEMINING 11cessories. The algorithms designed have been developed in C/C and runin QNX real time operating system. With this, several control strategieshas been performed in order to carry out humanitarian demining tasks(Montes et al, 2015a; Montes et al, 2015b; Mena et al., 2015).The objective is carry out stable trajectories in order that scanning manipulator arm can perform suitable motions of its end-effector, where ismounted the metal detector head. To this end, the hexapod robot carriesout established steps toward a fixed position for that the manipulator armperforms the ground exploration. Fig. 7 shows the hexapod robot with themanipulator arm installed in front of its body.Fig. 8. Comparison between the motion of the robot during a discontinuous gait(to left) and continuous gait (to right).Fig. 8 shows the comparison between the discontinuous gait and thecontinuous gait with length steps about 50 mm during a gait cycle of twosteps and a support factor of ½. In continuous gait, it is possible to seesome discontinuities; this is because the contacts of the feet with the soilhave a delay related with the constructions of them. The feet have springsin order to the inductive proximity sensors detect the contact with the soil,in this moment, each axis of the foot is displaced inside of foot chamber,up to be near to the sensor.On the other hand, the manipulator arm has 5 dof and has been installedon its tool centre point a metal detector head, in order to search landmines.Additionally, in the scanning manipulator arm are been installed two different cameras, a mini ToF camera and a VRMagic multi sensor camera.The first camera has resolution of 120 x 160 pixels used to acquire a depthmap and amplitude image, as well as a cloud of points that contain the Cartesian coordinates of the target. The second camera is equipped with twopixel-synchronous CMOS sensors, which acquire RGB images with reso-
12Results from European Projects on Roboticslution of 754 x 480 pixels. The sensor fusion between the ToF data withthe RGB images provides the necessary information to know the area thatthe manipulator arm explores. Fig. 9 shows the different images of the sensory system installed on the manipulator arm, in order to observe the zonescanned by the manipulator.Fig. 9. (a) Set the cameras installed on the manipulator, mini-ToF and miniRGB cameras. (b) Image of amplitude, and depth range of the mini-ToF.(c) Terrain surface mapping.6 ConclusionsIn this paper has been summarized the main works and general resultsfrom TIRAMISU European Project carried out by the Centre for Automation and Robotics CSIC-UPM. The works performed by CAR team (Fieldand Service Robotics Group) has been related with the design, implementation and validation of several tools, which have been proposed to be usedin humanitarian demining tasks. For further information provided in thischapter, the interested reader could search the references related with theworks carried out by the CAR group, which are cited in Reference section.
TIRAMISU EUROPEAN PROJECT: DESIGN AND IMPLEMENTATION OFTOOLS FOR HUMANITARIAN DEMINING 13AcknowledgementsThe authors acknowledge funding of this work under TIRAMISU Project Grant Agreement Nº 284747 of the 7FP, and partial funding from the RoboCity2030-III-CM project (Robótica aplicada a la mejora de la calidad devida de los ciudadanos. Fase III; S2013/MIT-2748), funded by Programasde Actividades I D en la Comunidad de Madrid and cofunded by Structural Funds of the EU. Dr. Héctor Montes also acknowledges support fromUniversidad Tecnológica de Panamá.ReferencesFernandez, R., Gavilanes, J., Montes, H., Salinas, C., Gonzalez de Santos,P., and Armada, M. 2015b. Scanning manipulator with terrain surfacemapping for demining tasks. In Proc. 18th Intl. Conf. on Climbing andWalking Robots and the Support Technologies for Mobile Machines. Sept.6-9, HangZhou, China. Assistive Robotics, pp. 317-324.Fernández, R., Montes, H., Gusano, J., Sarria, J., Armada, M. 2014a. Design of the Human Machine Interface for training activities with hand-helddetectors. In Proc. International Symposium “Mine Action 2014”, 23-25April 2014, Zadar, Croatia, pp. 115-120.Fernández, R., Montes, H., Gusano, J., Sarria, J., and Armada, M. 2014b.Force and angle feedback prodder. In Proc. 17th Intl. Conf. on Climbingand Walking Robots and the Support Technologies for Mobile Machines.July 21-23, Poznan, Poland. Mobile Service Robotics, pp. 305-312.Fernández, R., Montes, H., Salinas, C., González de Santos, P., Armada,M. 2012. Design of a training tool for improving the use of hand-held detectors in humanitarian demining. Industrial Robot: An International Journal, 39(5): 450 – 463.Fernández, R., Montes, H., Sarria, J., Salinas, C., Armada, M. 2013. Evaluation of a Sensory Tracking System for Hand-held Detectors in OutdoorConditions. In Proc. 10th Intl. Symp. "Humanitarian Demining 2013", 2325 April, Šibenik, Croacia, pp. 125-128.Fernández, R., Salinas, C., Montes, H., Sarria, J., Armada, M. 2015a. Design of a Human Machine Interface for Training Activities with Prodders.In Proc. 12th Intl. Symposium MINE ACTION 2015, 27-30 April, Biograd, Croatia, pp. 161-164.
14Results from European Projects on RoboticsGavilanes, J., Fernández, R., Montes, H., Sarria, J., González de Santos,P., Armada, M. 2015. Instrumented Scanning Manipulator for LandminesDetection Tasks (Poster). In Proc. 2015 IEEE Intl Conf on AutonomousRobot Systems and Competitions ICARSC’2015, 8-10 April, Vila Real,Portugal, pp. 180-185.GICHD. 2009. Annual Report 2009. Geneva International Centre for Humanitarian Demining. Geneva, Switzerland.Gonzalez de Santos P, Cobano J, Garcia E, Estremera J, Armada M. 2007.A six-legged robot-based system for humanitarian demining missions.Mechatronics, 17: 417–430.Gonzalez de Santos, P. and Jimenez, M.A. 1995. Generation of discontinuous gaits for quadruped walking machines. Journal of Robotics Systems,12(9): 599-611.Gonzalez de Santos, P., Garcia, E., Estremera, J., and Armada, M.A. 2002.Silo6: design and configuration of a legged robot for humanitariandemining. IARP WS on Robots for Humanitarian Demining. Vienna, Austria.Habumuremyi, JC., et al. 1998. Rational designing of anelectropneumaticrobot for mine detection. CLAWAR'98, First International Symposium,Brussels, Belgium; November, 26-28.Hirose, S. and Kato, K. 1998. Quadruped walking robot to perform minedetection and removal task. In Proc. of the 1st International Conference onClimbing and Walking Robots, Brussels, Belgium, pp. 261-266.Mellar, H., Kambouri, M., Logan, K., Betts, S., Nance, B. and Moriarty,V. 2007. Effective Teaching and Learning: Using ICT. London: NRDC.Mena, L., Montes, H., Fernandez, R., Sarria, J., and Armada, M. 2015. Reconfiguration of a climbing robot in an all-terrain hexapod robot.ROBOT2015: Second Iberian Robotics Conference, 19-21 November,Lisbon, Portugal. Advances in Intelligent Systems and Computing Series,Ed. Springer, [ACCEPTED].Montes, H., Díaz, E., Fernández, R., Sarria, J., Armada, M. 2015. e-Tutorfor training in antipersonnel landmines identification. In Proc. 12th Intl.Symposium MINE ACTION 2015, 27-30 April, Biograd, Croatia, pp 189192.
TIRAMISU EUROPEAN PROJECT: DESIGN AND IMPLEMENTATION OFTOOLS FOR HUMANITARIAN DEMINING 15Montes, H., Mena, L., Fernandez, R., Sarria, J., and Armada, M. 2015b.Inspection platform for applications in humanitarian demining. In Proc.18th Intl. Conf. on Climbing and Walking Robots and the Support Technologies for Mobile Machines. Sept. 6-9, HangZhou, China. Assistive Robotics, pp. 446-453.Montes, H., Mena, L., Fernandez, R., Sarria, J., González de Santos, P.,Armada, M. 2015a. Hexapod Robot for Humanitarian Demining. In Proc.RISE 2015, 8th IARP Workshop on Robotics for Risky Environments[CD], 28-29 January 2015, Naval Academy, Lisbon, Portugal.Nonami, K., et al. 2003. Development and control of mine detection robotcomet-II and Comet-III. JSME International Journal, Series C, 46(3): 881890.Vallon. 2012. VMC1 Mine Detector. Available in: http://www.vallon.de/pdf/VMC1 leaflet 10 2012.pdf.Wu, J. P., Tsai, R. J., Chen, C. C., and Wu, Y. C. 2006. An integrativemodel to predict the continuance use of electronic learning systems: hintsfor teaching. International Journal on E-Learning, 5(2), 287-302.
special tasks VMC1 Mine Detector manufactured by Vallon (Vallon, 2012). However, this tool can be installed in any other metal detector, due its modularity and flexibility of use. Previous to the training of apprentices was carried out a study of the ex-pert’s skills