Transcription
IEEETRANSACTIONS1) a time-sharinginputON MICROWAVEsystem withand outputprinter,high speed inputUsually,a remoteand 2) a batchand outputthe computationaldesignof evaluatingcomputerwhere theprocessorMostcenters today can only offer to provideprocess)Even so,the advantage of fuller and well formattedoutput can beworthwhile.Also, the dedicated computercan generallyhandle a much larger and more sophisticatedprogram aswell as provide plots and other types of output not possibleon the typewriterterminal.On programmingIt is betteran extensivementsitself, a few remarks maybeto use alphabetictablemnemonicof numbers(or operations).Thisthose who have writtento describethe circuiteleofJOHNforpaper surveys recerd automatic optimizationwhich either have found or should find useful applicationone is xand least th. Detailed consideration is given to methods of dealing withby means of transformationsthe formulationorof problems in terms of inequalityconstraints aud their solution by sequential unconstrained minimizationdiscussed. Several one-dimensionaland multidimensionalstrategies are summarized in a tntorialand Goldeu Section search, interpolationbrock’smethod, Powell’sRaphson, Fletcher-Powell,minimizationmethods, and the Newton-and least squares methods. Relevant examplesof interest to microwave circoit designers illustratingcomputer-aidedismauner. Included are Fibonaccimethods, pattern search, Rosen-method, simplexoptimizationit is well tohas been made.Withoutinvestedgoodof a programcan-documentationtheto create the programComputer-AidedMEMBER,may beDesignIEEEPapermethodsand methods which can he implemented in situations whenpenalties. In particular,Therefore,I. INTRODUCTIONin the optimalthe classical synthesis approach (analytic or numerical) is inappropriate.and response constraintsin thewhere the elementcharacteristics.and adequate documentationand moneyformulationsparameterto enter tabularnot be overemphasized.surelyare formulatedto meet situationsdifferentdirectlyMistakes and errors during the program usage seem unavoidable. The program should plan for them, for instanceby checking the reasonableness of the input values or byreadingalphabeticidentifiersbuilt into the data input.Recovery and/or escape procedures should be provided forULLYoptimizationexist for manyare not so formulated.have the capabilitydesign of microwave networks by digital computer. Emphasis is given toObjectives for networklist of elements.formulaselements and thus, can be incorporatedprogram,W. BANDLER,InvitedAbstract—Thiscircuitthe wholemathematicalwasted.analysis programs.MethodsOptimizationThoughthanhas been the usual choiceand used circuit533options can save computerand user time. Forstoring a portion of the circuit that is used severalthe user after the mistakeworthwhile.codes rather1969out going tlu-oughthethe resultsa half day or later after the job has been submitted.NO. 8, AUGUSTtimeone’s tentative(batchUtilityexample,MTT-17,times can effect such savings. Another is an editing routinewhich allows the user to change a portion of the circuit with-system. However,modernVOL.withdevices.almost immediatelycan be tremendous.TECHNIQUES,and a one-costs and engineeringwill be greater with the time-sharingadvantageANDterminalis by means of a keyboardcharacter-at-a-timeoff-lineTHEORYthe applicationoftechniques are presented. The paper alsoincludes a classified list of references.Manuscript received February 18. 1969; revised May 1, 1969. Thiswork was carried out at the University of Manitoba with financialassistancefrom the Faculty of Graduate Studies of the University ofManitoba and from the National Research Council of Canada.The author was with the Numerical Applications Group, Department of Electrical Engineering, University of Manitoba, Winnipeg,Canada. He is now with the Department of Electrical Engineering,McMaster University, Hamilton, Ont., Canada.AUTOMATEDdesignone of the ultimateandoptimizationisgoals of computer-aidedl!?design. The amount of human interventionrequired toproduce an acceptable design, even though this is often unavoidable, should, therefore, be regarded as a measure of ourignorance of the problem, our inability to specify our objectives in a meaningful way to the computer, or our failure toanticipate and make provisions for dealing with the possiblehazards whichproblem.could be encounteredin the solutionof theAn on-line Facility which permits the user to propose a circuit configuration,analyze it, and display the results maywell be an invaluableeducationaland research tool provid-ing the user with insight into certain aspects of his designproblem. But even with the fastest analysis program it wouldbe misleading to suggest that this method can be efficientlyapplied to the design and optimizationof networks involving more than a few variables and anything other than thesimplest of parameter and response constraints. For a fairlycomplex network optimizationproblem the number of effective response evaluations can easily run into the thousandseven with the most efficient currentlyavailable automatic
IEEE534optimizationmethodsbefore a local optimumand then only for that predeterminedFullyautomatedTRANSACTIONSnetworkis reached—zation.THEORYis stillvery effective use of the com-ANDTECHNIQUES,Section IV deals with constraints.one-dimensionalconfiguration.design and optimizationsome way off. In the meantime,ON MICROWAVEoptimizationAUGUST1969Section V describesstrategies, followedby SectionVI which describes multidimensionaldirect search strategiesand Section VII which describes multidimensionalgradientputer can be made by allowing the computer to optimize anetworkof predeterminedallowableconfigurationautomatically. If the results are unsatisfactoryin some way, onecould change the objective function,impose or relax constraints, try another strategy, alter the configuration,etc.,strategies. Section VIII reviews some recent papers whichreport the applicationof various methods to network optimization.Finally,the references are divided into broadclassifications:references of general interest [1 ]–[22], references recommended for direct search methods [23]– [55] andwhichevercoursegradientObviously,this can be executed either by batch processingof actionor from an on-lineterminal.is appropriate,programagain.There is no reason why the on-line designer should not avail himselfzationand tryof an efficientInevitably,tionthesis[122],Objectivesfor networkleast @h are formulatedoptimizationis nd discussed.dealing[84]–[1 19], andwithsomeapplimiscel-[120] -[126].the materialpresentedcurrentin this paper tends tointerests.Conspicuousomissions include Chebyshev polynomialand rational function approximationtechniques using the Remez methodor its generalizations[17], [115], [125], and a discussionof optimizationby hybrid computerin which the systemis simulatedon an analog computerwhile the optimiza-phasis is given to formulationsand methods which can beimplementedin practical situations when the classical synor numerical)[56] -[83],networkreflect some of the author’sWith the objective, therefore, of encouraging more effectiveuse of computers, this paper surveys recent automatic optimization methods which either have found or should finduseful applicationin computer-aidednetwork design. Em-(analytictolaneous referencesoptimi-as well as an analysis program.approachmethodscationsstrategyTheis controlledauthorby the digitalapologizesin advancesearchers to whose contributionsjustice.He hopes, however,computer[120],to all those re-he may not have done fullthat the referencesadequatelyDetailed considerationis given to methods of dealing withparameter constraints by means of transformationsor penal-representties. This is rather importantfor microwave networks wherethe practical ranges of parameter values can be quite narrow,e.g., characteristicimpedance values for transmissionlinesextend from about 15 to 150 ohms. The configuration,thematic computer-aidedmethods in microwave network designis not so well established as the use of computers in thenumerical solution of electromagneticfield problems [126].For this reason, there are not yet many microwave referencesoverall size, the suppressionfromof unwantedmodes of propaga-tion, considerationsfor parasitic discontinuityeffects, thestabilizationof an active device can all result in constraintson the parameters.Responseeasy to deal with than parameterconstraints,whichconstraints,methodsthe state of the artfor computer-aidedwhichunconstrainedminimizationare lessto choose to illustrateThe problemis to minimizeand the Newton-Raphson,Fletcher-Powelland whereas far as efficiency and reliabilityare concerned. It is generally only near the minimumthat differences in efficiencybegin to manifest themselves between quadraticallyconvergentand nvergence is not the prerogativeof gradientmethods as classified in this paper.Section II introducesfundamentalconcepts and definitions. Section 111 formulates objectives for network optimi-V where(1)1“i.and least squareswidely appreciatedthat most direct search methods aresuperior, in general, to the classical steepest descent methodand compare rather favorably with other gradient methodstech-, r:includingmethods,methods.Slightlymore emphasis has been accorded todirect search methods than to gradient methods becausethey appear to date to have been more frequently employedin microwavenetworkoptimization.It is probablynotthe optimizationu u( )Several one-dimensionaland multidimensionalminimization strategies are summarized in a tutorial manner. Includedare Fibonacciand GoldenSection search, interpolationmethods,patternsearch and some variationsRosenbrock’smethod, Powell’s method, simplexdesign. The use of such auto-11. FUNDAMENTAL CONCEPTSAND DEFINITIONSare also con-is discussed.optimizationniques.sidered in some detail. In particular,the formulationofproblems in terms of inequalityconstraints and their solution by sequentialof automaticU is called the objective function and the vector representsset of independentparameters. Minimizinga function isathe same as maximizing the negative of the function, so thereis no loss of generality.In general, there will be constraints that must be satisfiedeither during optimizationor by the optimumsolution.Each parameter might be constrainedand lower bound as follows:’41, 41s out; l,z.,kexplicitly where OZ and @ware lowerand upperFurthermore,the problemh implicit functionscould be constrainedCj( ) 0j l,2,bounds,. . . l?.by an upper(3)respectively.by a set of(4)
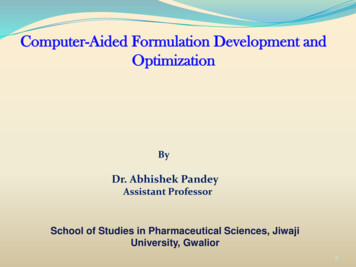
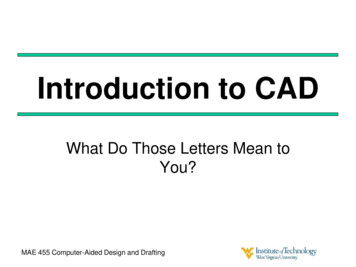
13ANDLER : OPTIMIZATIONCOMPUTER-AIDEDDESIGNAny vector which satisfies the constraintsis termedfeasible. It lies in a feasible region R (closed if equalities are42admissibleMETHODSFORas in (3) or (4), open otherwise)Fig.1 shows a 2-dimensionalcontour sketch whichtrates some features encounteredA h.vpercontour,describedfor anyin optimizationk“ ”””””” ’” ””epoint.A minimumone localgeneratedU dcontour(5)of a contour.Theby a pointThefirstfeasible on thenarrowfeasibleregionvolley1,2 -77.7/,/,////////0’ ’‘Lnon---ifeosible(6)neighborhoodupon the directiondefinitiontermsbeing investi-of a minimumof theis thematrix.Two-dimensionalcontour sketch illustratingencountered in optimizationproblems.some anexist, amay be definedhas a uniquein the present con-optimumThe presence of discontinuitiesneed not affect its unimodality.so it is called bimodal.in the feasiblein the functionA strictlyFig.or its1 has twoconvex functionisone which can never be underestimatedby a linear interpolation between any two points on its surface. Similarly,astrictly concave functionis one whose negative is strictlywhere.functionas one whichderivativesAd!partialthe first and second derivativespoint is a minimumif the gradient vector is zero and theHessian matrix is positive definite at that point.region.A of secondAssumingA unimodalfollows.multidimensional1.of .series are given byI(8)1’1A l,represents the parameter \/.--’regiondependingthree5; ;2{/by U( ) such thatby the fact that it can appear to be a maximumor a minimum10,.and one saddle(Since methods which guarantee convergence to a globalminimumare not available, the discussion must restrictitself to considerationof local minima.)A saddle point isgated. A more formal globol mmlmumI ine15U(CJ) u( )any in the immediatedistinguished53saddle point 1Fig.for/0minimummay be locatedresponse hypersurface---.1 illus-by the relationgeneralizationminimum,.local minimumI Rfeasible region in Fig. 1 is determined by fixed upper andlower bounds on . The feasible region is seen to containone global/,/,-problems.Lr( ) t con.t.,is the multidimensionalconstraintboundary.as expressed byKR.It is assumed that U( ) can be obtainedeither by calculationor by measurement.535du(7 1[--111![convex. Examples of unimodal,convex and concave functions of one variable are illustratedin Fig. 2. (The word“strictly”is omitted if equality of the function and a linearinterpolationincrements,can occur.)If the first and second derivativesstrictmatrixconvexity,is positiveforexample,definiteof a functionimpliesthatexist thentheHessianand vice versa. Considerthe nar-row curued ualley shown in Fig. 3(a). It is possible to under(9)estimate U by a linear interpolationalong a contour, forexample, which indicates that the functionis nonconvex.Contours of this type do present some difficulties to optimizationstrategies.Ideally,the form of concentricone wouldlike contoursto be inhyperspheres, and one should attemptto scale the parameters to this end, where possible.Fig. 3 shows contours of other two-dimensionaloptimizais the gradientvector containingthe first partialderivatives,andtion problemswhich3(b), the minimumd’u131 lz[H d2ud’il. . .&#@q52a la ha’ua ,a l(lo).1present difficultiesin practice.lies on a path of discontinuousIn Fig.deriva-tives; the constraint boundariesin Fig. 3(c) clefine a nonconvex feasible region (a feasible region is convex if thestraight line joining any two points lies entirely within theregion); in Fig. 3(d) the minimumlies at a discontinuityinthe function. Theorems which invoke the classical propertiesof optima or such concepts as convexity may not be soreadily applicable to the problems illustratedin Fig. 3(b)–(d), and yet the minima involved are quite unambiguouslydefined.
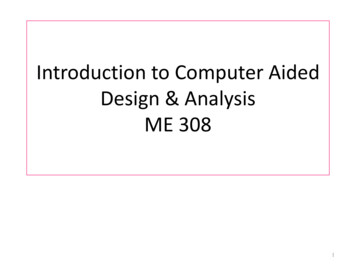
IEEE536TRANSACTIONSON MICROWAVEemphasis“f , :,u convexFig.concavefunctionExamples of unimodal,2.and parasitictions which remainn iis on an allowticularlyimportantin microwavenetworkoptimizationwhere the range of permissibleparametervalues is oftenfairly narrow, the choice of physical configurationsmay befunctions1ANDimplicitconstraints,e.g., on the network parametersandresponses, to be taken into account. This is felt to be par-limitedun]modolTHEORYphysicaleffects can be acute. Thus,close to physicaland practicalrealizabilityrealityformula-and aim towardsare preferred,at least bythis author.DirectMinimaxFormulationAn ideal objectiveU wherefunctkxfor networkU U(O, ) maxoptimization[wu( ) (F( ,is to minimize ) – J%(*)),[ 1!*Jconvex, andconcave functions of one variable.(11)– Wl( ) (F(o,t)– M*))]whereJF(o, represents the network///. “,m”m(a)/1’\\m .m.,\ , is the lower boundThis formulationf\response/‘\//’, --constrainediminimum .///’continuous.The following//42I‘ .-.-/““is illustratedsatisfyingrestrictions/minimum/by Fig. 4. Fig. 4(a) shows aarbitraryfailingspecifications;Fig.to satisfy a bandpassare imposed:AS.(*) 2 s,( )(12)w.( ) 0(13)Wl( ) 0.(14)(d)(c)Fig.functionfalter specification;Fig. 4(c) shows a response function justsatisfyinga possible amplifierspecification.F( , x) willoften be expressible as a continuousfunction of and .But St( ), SJ ), w&),and wJY) are likely to be dis-/1 or timeon .4(b) shows a response function---- )e.g., frequencyw z( ) is a weighting factor for S&) U is the upper bound on *(b)/’\;“. / t, -, //parametersvariable,\\i,“,/an independentSJ ) is a desired upper response specificationSl(y?) is a desired lower response specificationw.( ) is a weighting factor for S.(4)/’—.-----unconstrained*is/---.””” ‘\#) is the response functionIContours which present difficulties to optimizationstrategies.(a) A narrow curved valley. (b) A narrow valley along which a pathof discontinuous derivatives lies. (c) A nonconvex feasible region.function.(d) A discontinuous3.A numberof the general references[1],[17],[19],[20]give good introductionsto the fundamentalconcepts anddefinitionsused in the literaturegenerally. Unfortunately,because of the diverse background of the authors concerned,there exists a profusionof differentnomenclature.present author has probably added to this confusion.)III.theseconditionswJ )(F(&4) — S.(#))and— w z(IJ)(F(o, ) — St(@)) are both positive when the specifications are not met; they are zero when the specificationsare just met; and they are negative when the specificationsare exceeded. The objectiveis, therefore,to minimizethemaximum (weighted) amount by which the network responsefails to meet the specifications, or to maximize the minimumamount by which the network response exceeds the specifications. Note the special case whenS.(*) S’,(*) s(t)w. (*) w 1(*) w ( )(15)OBJECTIVESFOR NETWORK OPTIMIZATIONIn this sectionnetwork(TheUndersome objectiveoptimizationfunctionwill be presentedformulationsforand discussed. Theand(16)
BANDLER: OPTIMIZATIONMETHODSFORCOMPUTER-AIDEDDESIGN537U – wzi(F,( )Stt)–iE’11and otherconstraints,e.g., as in (3) whereadditionalindependentvariablerefers to quantitiesvalues of (alreadydefined)U is nowanthe subscriptevaluatediat discretewhich form the set { , ] in the intervalThe index sets L and It, whichcontainand where(19)[ Z, ].are not necessarilydisjoint,those values of i which refer to the upper and lowerspecifications, respectively. Thus, in the case of Fig. 4(a), theindex sets L and 11 could be identical. For Fig. 4(b), the setL would refer to the passband and the set Z’Z to the stopbands. In Fig. 4(c), there might be an intersection betweenIu and lz.At a minimum,at least one of the constraints (18) or (19)must be an equality, otherwise U could be further reducedwithoutany violationminimumamountof the constraints.by whichthe specificationsIfthe networkhas been maximized.1 0 then theresponse exceedsIfU O thenthemaximumamount by which the network response fails tomeet the specifications has been minimized.It is clear thatbothFig. 4. (a) A response function satisfying arbitrary specifications.(b) A responsefunction failing to satisfy a bandpass filter specification. (c) A response function just satisfying an amplifier specification.thisand the previousformulationshave ultimatelysimilar objectives. Indeed, if the sets lU and 11are infinite thenthe optimumsolutions given by both formulationsmay beidentical. Not surprisingly such a problem may be describedas one which has an infinite number of constraints.However, withfinite1,, and It the presentused in an optimizationof discontinuousformulationcan beprocess which avoids the generationderivativeswithinthe feasibleregion,aswill be seen in Section IV.which reduces (11) toA special case again arises whenL!lui ThisformChebyshevmaybe recognizedas the morespecificationsof the particularwithinthe constraintslem, appears to have received little rchintomethodsA less direct formulationfor dealingwithremains t o be done.in Terms of InequalityConstraintsthan the previous– L%,)iEIu(23). .ttil.(24)U – wJF, ( ) – S.)This formulation,been successfullywhich is an approximationto (17), hasused by Ishizakiand Watanabe[102],[103] (see Section VIII).WeightingFactorsA discussionof the weightingfactors is appropriateat thisstage. Essentially, their task is to emphasize or reemphasizeva ious parts of the response to suit the designer’s requirements. For example,if one of the factorsis unityand theother very much greater than unity, then if the specificationsare not satisfied, a great deal of effort will lbe devoted toone, but onewhich seems to have provided considerablesuccess, is theformulationin terms of inequalityconstraintson the network response described by Waren et al. [18]. Their formulation will be slightly adjusted to fit in with the present notation,The problem is to minimize U subject tou WU,(F,( )U a w,(F, (0) – S,)in the literatureThis is chiefly due to the fact thatin the form of(11)which reduces (18) and (19) toprob-discontinuousderivativesare generated in the responsehypersurface when the maximum deviation jumps abruptlyfrom one point on the axis to another, and that multidimensionaloptimizationmethods which deal effectivelywith such problems are rather scarce [89], [100].In spite of these difficulties,some success with objectivesin the form of (17) has been reported [23], [88]. But it is feltobjectives 20)Stconventionalthe optimumof whichat satisfying the designthat type of objective.The direct minimax formulation,represents the best possible attempton networkA!lli(18)forcingthe responseassociatedwiththe largeweightingfactor to meeting the specifications at the expense of the restof the response. Once the specificationsare satisfied, theneffort is quickly switched to the rest of the response while theresponse associated with the large weightingfactor is virtually left alone. In this way, once ecrtain parts of the network response reach acceptable levels they are effectivelymaintainedimprovingat those levels whileother parts.furthereffortis spent on
IEEE538TRANSACTIONSLeast pth ApproximationA frequentlybe writtenemployedclass of objectivein the generalizedU u( ,t) 5functionsmaywpIWU’4 )(25)Id ) 1“ THEORYU whereraised to some power p ofresponse froma desired response over a set of sample pointsbe any positive{ .}.p mayUl,can consistof(11)have a linearU2, . . . couldtake the formas inequalitybecause the nature of the constraintsnumberof sample pointsparticularapply,problemprocess.should be carefullyunderconsideration.of course, to any formulationSo thechosen for theThese argumentswhichinvolvessam-approachesinsteadtimeof an optimizationare possible s on how to handle constraints in optimizationinvariablyfollow discussions on unconstrainedoptimization methods in most publications.This is unfortunateinto the problemcan be decidingan optimizationdesign problemstrategy.whichAndand the way they enterfactorsin the selectionofit is rare to find a networkis unconstrained.This section deals in particularpling.of (25). Forwould then be given values commensuratewith the importance of U , U2, . . ., respectively. If, however, these objec-The sample points are commonly spaced uniformlyalongthe Y axis in the interval [ 1, U]. If the objective is effectively to minimizethe area under a curve then sufficientsample points must be used to ensure that (25) is a goodapproximationto the area. However, it should be remembered that function evaluationsare often by far the mostparts(29)amplifiera compromisemight have to be reached betweengain and noise figure [93]; another example is the problemof approximatingthe input resistance and reactance of amodel to experimentaldata [100]. The factors al, CW,. . .alternativeconsumingcombinationCYIUI - CY2U2 .tives can be representedinteger.of several objectives.and (25) suggest such a possibility.we could(26)eJ@) of the networkFor example, one may optimizeset to unity and with p 2. If thefunctionthe formFor example,deviations1969ObjectivesThe objectiveimize the sum of the magnitudesAUGUSTmaximum deviation is larger than desired, one could selectappropriatescale factors and/or a higher value of p and tryagain from the previous “optimum.”Indeed,and where the subscript i refers to quantities evaluated at thesample point ,, Thus, the objective is essentially to min-TECHNIQUES,switch objective functions,numberof sample points, orweightingfactors after any complete optimizationif theCombinedwherethe weightedANDoptimum is unsatisfactory.with the weighting factorsform‘i 1ON MICROWAVEwith methodsof reducingWith p 1, (25) represents the area under the deviationmagnitude curve if sufficient sample points are used. WithObviously,p 2 we have a least squares type of formulation.a constrained problem into an essentially unconstrainedone.This can be accomplishedby transformingthe parametersand leaving the objective function unaltered, or by modify-the higher value of p the more emphasis will be given tothose deviations which are largest. So if the requirementisto concentrate more on minimizingthe maximum deviationing thepenalty.a sufficiently large value of p must be chosen [17],[100]. The basis of such a formulationis the fact functionby introducingfor Parameterthe most frequentlyoccurringconstraintboundsby defining /\ e( , ) I is definedof a sampledment isresponsein the intervaldeviationon theas indicatedsuch thatIf the periodicitycaused by this transformationable and the constraints are in the formwhenofConstraintsvalues are upper and lowerby (3). These can be handledsome kind[3]is undesir-[ z, U]. In termsthe correspondingstatewhich defines an open feasible region,one could try [86]whererangesolutions1/Pmax [ I e ( ) I ] lim iP*W[ iIn practice,I e,( ) 1’1values of p from 4 to 10 may provide.(28)an ade-quate approximationfor engineering purposes to the idealobjective. A good choice of the weightingfactors W; willalso assist in emphasizingor deemphasizingparts of theresponse deviation. It may also be found advantageous to— @ &’ @ but where0 cot–lonly.#li’ n-withinthe(33)are allowed. This transformationhas a penalizing effect uponthe parameters in the vicinity of the upper and lower bounds.
BANDLER: OPTIMIZATIONSo if the optimumboundsMETHODSCOMPUTER-AIDEDvalues are expected to lie away from thethis transformationparameterFORmay also introducea favorablescaling [86].work539of a tunnel-diodeminimize ; 1;(34)one can use(35)@i ‘#ti 4Ji’2.4, 0(36)@i @’.(37)one can usetransformationsof variablesconstrainedone but mightConsidercan be found[3].while maintainingcertainatspecificationsfrequenciesIf one is lucky,of course, one might be able to rely on theconstraintsnot being violated. If, for examlple, a certainparameter must be positive but it is clear from the networkconfigurationthatconstrainas the parametertends to zero the re-anyway then it may not be necessary tothe parameter.However,one can not always relyon good fortune so various methods for dealing withequality constraints in general need to be discussed.Let all the inequalityincludingconstraintsthe -dependentin a particularones be containedin-problemin the vector ofm functionsmay not only reduce an essen-optimizationproblemalso improve01( )to an unconstrainedparameterscaling.4!(0)the constraintltj s 4J’4,effects need to be takeninto account[:192( ).(47)Lgm( )Jwhere the feasible regionis defined bylg( )[17],[88]. Suppose we consider the example1 (38)s ‘ui,which restricts the ratio of two parameters to be within apermissible range [ii;, u;i]. This type of constraint can occurwhen parasiticwas to(see Fig. 15).sponse deterioratesForOtherwhere the objectiveon the input resistance and reactance at differentare in the formWell chosen transformationsamplifierthe square of the input reactance oft he networkselected frequenciesWhen the constraintstiallyDESIGNFor example,constraints(48)20.in the formof (3) may be written(39)@2/q)l u4, 0(40) , 0(41)(49)Findingwhere 1 0 and u O. It may be verifiedtionsa Feasible Pointthat the transformaFinding a feasible point to serve as the initiad point in theconstrained optimizationprocess may not be easy. It may@l e“ cos (OZ (0. – 02) sin’ ZJ( )42(8L22)(43)u m/2(W)andbe found by trial and errorzation as follows.[87] or by unconstrainedoptimi-Minimize e“sin(h –h)sin’where0 Oz tan–l1 Ou tall–lensure that for any Z1 and 22 the constraints(39) to (41) areA minimumfound.of zero indicatesPenalties forNonfeasiblethat a feasible pointhas beenalways ly,the parametersconstraintsone cannot always convenientlyto incorporateof the form of(4)constraints.transformationsthe question. -dependent constraintstion may, without loss of generality, ,( , *)in the interval2 0[ 1, ] or, at particular*J2 0{ j l,2,Withtransformimplicitmay be out ofin network optimizabe written asj l,2, l,z.,nd%Pointsin General. . .h(45)that the initialsolutionis feasible, the simplestway of disallowinga constraint violationset of parameter values which producesis by rejecting anya nonfeasible solu-tion. This may be achieved in direct search methods duringoptimizationeither by freezing the violatingparameter(s)temporarilyor by imposing a sufficiently large penalty on theobjective function when any violation occurs. Thus, we mayadd the termpoints x; (46). . .h.A microwave problem having constraints of this form hasbeen described by Bandler [87]. It concerns a stabilizing net-I It is hoped that the reader will not be too upset by A(O) O whichis used for g,(@) O, i i, 2, . . . m.
IEEE540to the objectivesatisfiedfunction.the objectiveAs longfunctionTRANSACTIONSas the constraintsis not penalized,ON ,value,------ ”to dealing with constraints.Dependingfunctionsteep valleys at the boundariesfirst or second asible point.NoteThis problemthat direct(Sectionalongtheresults in a nonVI) in particularthose good at followingnarrow curved valleys, might beable to make reasonable progress once a feasible direction isfound. A rotationof coordinatesproblem to some extent.The Created Response furt
methods for computer-aided design. The use of such auto-matic computer-aided methods in microwave network design is not so well established as the use of computers in the numerical solution of electromagnetic field problems [126]. For this reason, there are not yet many microwave references