Transcription
Solved Problems in Classical Mechanics
This page intentionally left blank
Solved Problems in ClassicalMechanicsAnalytical and numerical solutionswith commentsO.L. de Lange and J. PierrusSchool of Physics, University of KwaZulu-Natal,Pietermaritzburg, South Africa1
3Great Clarendon Street, Oxford ox2 6dpOxford University Press is a department of the University of Oxford.It furthers the University’s objective of excellence in research, scholarship,and education by publishing worldwide inOxford New YorkAuckland Cape Town Dar es Salaam Hong Kong KarachiKuala Lumpur Madrid Melbourne Mexico City NairobiNew Delhi Shanghai Taipei TorontoWith offices inArgentina Austria Brazil Chile Czech Republic France GreeceGuatemala Hungary Italy Japan Poland Portugal SingaporeSouth Korea Switzerland Thailand Turkey Ukraine VietnamOxford is a registered trade mark of Oxford University Pressin the UK and in certain other countriesPublished in the United Statesby Oxford University Press Inc., New Yorkc O.L. de Lange and J. Pierrus 2010 The moral rights of the authors have been assertedDatabase right Oxford University Press (maker)First published 2010All rights reserved. No part of this publication may be reproduced,stored in a retrieval system, or transmitted, in any form or by any means,without the prior permission in writing of Oxford University Press,or as expressly permitted by law, or under terms agreed with the appropriatereprographics rights organization. Enquiries concerning reproductionoutside the scope of the above should be sent to the Rights Department,Oxford University Press, at the address aboveYou must not circulate this book in any other binding or coverand you must impose the same condition on any acquirerBritish Library Cataloguing in Publication DataData availableLibrary of Congress Cataloging in Publication DataData availableTypeset by SPI Publisher Services, Pondicherry, IndiaPrinted in Great Britainon acid-free paper byCPI Antony Rowe, Chippenham, WiltshireISBN 978–0–19–958252–5 (Hbk)978–0–19–958251–8 (Pbk)1 3 5 7 9 10 8 6 4 2
PrefaceIt is in the study of classical mechanics that we first encounter many of the basicingredients that are essential to our understanding of the physical universe. Theconcepts include statements concerning space and time, velocity, acceleration, mass,momentum and force, and then an equation of motion and the indispensable lawof action and reaction – all set (initially) in the background of an inertial frame ofreference. Units for length, time and mass are introduced and the sanctity of thebalance of units in any physical equation (dimensional analysis) is stressed. Referenceis also made to the task of measuring these units – metrology, which has become suchan astonishing science/art.The rewards of this study are considerable. For example, one comes toappreciate Newton’s great achievement – that the dynamics of the classical universecan be understood via the solutions of differential equations – and this leads onto questions regarding determinism and the effects of even small uncertainties ordisturbances. One learns further that even when Newton’s dynamics fails, many ofthe concepts remain indispensable and some of its conclusions retain their validity –such as the conservation laws for momentum, angular momentum and energy, and theconnection between conservation and symmetry – and one discusses the domain ofapplicability of the theory. Along the way, a student encounters techniques – such asthe use of vector calculus – that permeate much of physics from electromagnetism toquantum mechanics.All this is familiar to lecturers who teach physics at universities; hence the emphasison undergraduate and graduate courses in classical mechanics, and the variety ofexcellent textbooks on the subject. It has, furthermore, been recognized that trainingin this and related branches of physics is useful also to students whose careers willtake them outside physics. It seems that here the problem-solving abilities that physicsstudents develop stand them in good stead and make them desirable employees.Our book is intended to assist students in acquiring such analytical andcomputational skills. It should be useful for self-study and also to lecturers andstudents in mechanics courses where the emphasis is on problem solving, andformal lectures are kept to a minimum. In our experience, students respond well to thisapproach. After all, the rudiments of the subject can be presented quite succinctly (aswe have endeavoured to do in Chapter 1) and, where necessary, details can be filledin using a suitable text.With regard to the format of this book: apart from the introductory chapter, itconsists entirely of questions and solutions on various topics in classical mechanicsthat are usually encountered during the first few years of university study. It is
Solved Problems in Classical Mechanicssuggested that a student first attempt a question with the solution covered, andonly consult the solution for help where necessary. Both analytical and numerical(computer) techniques are used, as appropriate, in obtaining and analyzing solutions.Some of the numerical questions are suitable for project work in computational physics(see the Appendix). Most solutions are followed by a set of comments that are intendedto stimulate inductive reasoning (additional analysis of the problem, its possible extensions and further significance), and sometimes to mention literature we have foundhelpful and interesting. We have included questions on bits of ‘theory’ for topics wherestudents initially encounter difficulty – such as the harmonic oscillator and the theoryof mechanical energy – because this can be useful, both in revising and cementingideas and in building confidence.The mathematical ability that the reader should have consists mainly of thefollowing: an elementary knowledge of functions – their roots, turning points, asymptotic values and graphs – including the ‘standard’ functions of physics (polynomial,trigonometric, exponential, logarithmic, and rational); the differential and integralcalculus (including partial differentiation); and elementary vector analysis. Also, someknowledge of elementary mechanics and general physics is desirable, although theextent to which this is necessary will depend on the proclivities of the reader.RFor our computer calculations we use Mathematica , version 7.0. In each instancethe necessary code (referred to as a notebook) is provided in a shadebox in the text.Notebooks that include the interactive Manipulate function are given in Chapters6, 10, 11 and 13 (and are listed in the Appendix). They enable the reader to observemotion on a computer screen, and to study the effects of changing relevant parameters.A reader without prior knowledge of Mathematica should consult the tutorial(‘First Five Minutes with Mathematica’) and the on-line Help. Also, various usefultutorials can be downloaded from the website www.Wolfram.com. All graphs ofnumerical results have been drawn to scale using Gnuplot.In our analytical solutions we have tried to strike a balance between burdening thereader with too much detail and not heeding Littlewood’s dictum that “ two trivialitiesomitted can add up to an impasse”. In this regard it is probably not possible to satisfyall readers, but we hope that even tentative ones will soon be able to discern footprintsin the mist. After all, it is well worth the effort to learn that (on some level) the rulesof the universe are simple, and to begin to enjoy “ the unreasonable effectiveness ofmathematics in the natural sciences” (Wigner).Finally, we thank Robert Lindebaum and Allard Welter for their assistance withour computer queries and also Roger Raab for helpful discussions.Pietermaritzburg, South AfricaJanuary 2010O. L. de LangeJ. Pierrus
al motion304Linear oscillations605Energy and potentials926Momentum and angular momentum1277Motion in two and three dimensions1578Spherically symmetric potentials2169The Coulomb and oscillator problems26310 Two-body problems28611 Multi-particle systems32512 Rigid bodies39913 Non-linear oscillations45414 Translation and rotation of the reference frame51815 The relativity principle and some of its consequences557Appendix588Index590
This page intentionally left blank
1IntroductionThe following outline of the rudiments of classical mechanics provides the backgroundthat is necessary in order to use this book. For the reader who finds our presentationtoo brief, there are several excellent books that expound on these basics, such as thoselisted below.[1 4]1.1Kinematics and dynamics of a single particleThe goal of classical mechanics is to provide a quantitative description of the motionof physical objects. Like any physical theory, mechanics is a blend of definitions andpostulates. In describing this theory it is convenient to first introduce the concept ofa point object (a particle) and to start by considering the motion of a single particle.To this end one must make an assumption concerning the geometry of space. InNewtonian dynamics it is assumed that space is three-dimensional and Euclidean.That is, space is spanned by the three coordinates of a Cartesian system; the distancebetween any two points is given in terms of their coordinates by Pythagoras’stheorem, and the familiar geometric and algebraic rules of vector analysis apply. Itis also assumed – at least in non-relativistic physics – that time is independent ofspace. Furthermore, it is supposed that space and time are ‘sufficiently’ continuousthat the differential and integral calculus can be applied. A helpful discussion of thesetopics is given in Griffiths’s book.[2]With this background, one selects a coordinate system. Often, this is a rectangularor Cartesian system consisting of an arbitrarily chosen coordinate origin O and threeorthogonal axes, but in practice any convenient system can be used (spherical, cylindrical, etc.). The position of a particle relative to this coordinate system is specified bya vector function of time – the position vector r(t). An equation for r(t) is known asthe trajectory of the particle, and finding the trajectory is the goal mentioned above.In terms of r(t) we define two indispensable kinematic quantities for the particle:the velocity v(t), which is the time rate of change of the position vector,[1][2][3][4]L. D. Landau, A. I. Akhiezer, and E. M. Lifshitz, General physics: mechanics and molecularphysics. Oxford: Pergamon, 1967.J. B. Griffiths, The theory of classical dynamics. Cambridge: Cambridge University Press,1985.T. W. B. Kibble and F. H. Berkshire, Classical mechanics. London: Imperial College Press,5th edn, 2004.R. Baierlein, Newtonian dynamics. New York: McGraw-Hill, 1983.
¾Solved Problems in Classical Mechanicsv(t) dr(t),dt(1)and the acceleration a(t), which is the time rate of change of the velocity,a(t) dv(t).dt(2)It follows from (1) and (2) that the acceleration is also the second derivativea d2 r.dt2(3)Sometimes use is made of Newton’s notation, where a dot denotes differentiation withrespect to time, so that (1)–(3) can be abbreviatedv ṙ ,a v̇ r̈ .(4)The stage for mechanics – the frame of reference – consists of a coordinate systemtogether with clocks for measuring time. Initially, we restrict ourselves to an inertialframe. This is a frame in which an isolated particle (one that is free of any appliedforces) moves with constant velocity v – meaning that v is constant in both magnitudeand direction (uniform rectilinear motion). This statement is the essence of Newton’sfirst law of motion. In Newton’s mechanics (and also in relativity) an inertial frame isnot a unique construct: any frame moving with constant velocity with respect to it isalso inertial (see Chapters 14 and 15). Consequently, if one inertial frame exists, theninfinitely many exist. Sometimes mention is made of a primary inertial frame, whichis at rest with respect to the ‘fixed’ stars.Now comes a central postulate of the entire theory: in an inertial frame, if a particleof mass m is acted on by a force F, thendp,dt(5)p mv(6)F whereis the momentum of the particle relative to the given inertial frame. Equation (5) isthe content of Newton’s second law of motion: it provides the means for determiningthe trajectory r(t), and is known as the equation of motion. If the mass of the particleis constant then (5) can also be written asdv F,dt(7)d2 r F.dt2(8)mor, equivalently,mThe theory is completed by postulating a restriction on the interaction betweenany two particles (Newton’s third law of motion): if F12 is the force that particle 1exerts on particle 2, and if F21 is the force that particle 2 exerts on particle 1, then
IntroductionF21 F12 .¿(9)That is, the mutual actions between particles are always equal in magnitude andopposite in direction. (See also Question 10.5.)The realization that the dynamics of the physical world can be studied by solvingdifferential equations is one of Newton’s great achievements, and many of the problemsdiscussed in this book deal with this topic. His theory shows that (on some level) it ispossible to predict the future and to unravel the past.The reader may be concerned that, from a logical point of view, two new quantities(mass and force) are introduced in the single statement (5). However, by using boththe second and third laws, (5) and (9), one can obtain an operational definition ofrelative mass (see Question 2.6). Then (5) can be regarded as defining force.Three ways in which the equation of motion can be applied are: Use a trajectory to determine the force. For example, elliptical planetary orbits –with the Sun at a focus – imply an attractive inverse-square force (see Question8.13). Use a force to determine the trajectory. For example, parabolic motion in auniform field (see Question 7.1). Use a force and a trajectory to determine particle properties. For example,the electric charge from rectilinear motion in a combined gravitational andelectrostatic field, and the electric charge-to-mass ratio from motion in uniformelectrostatic and magnetostatic fields (see Questions 3.11, 7.19 and 7.20).1.2Multi-particle systemsThe above formulation is readily extended to multi-particle systems. We follow standard notation and let mi and ri denote the mass and position vector of the ith particle,where i 1, 2, · · · , N for a system of N particles. The velocity and acceleration of theith particle are denoted vi and ai , respectively. The equations of motion aredpi(i 1, 2, · · · , N ) ,(10)dtwhere pi mi vi is the momentum of the ith particle relative to a given inertial frame,and Fi is the total force on this particle.Fi In writing down the Fi it is useful to distinguish between interparticle forces, dueto interactions among the particles of the system, and external forces associated withsources outside the system. The total force on particle i is the vector sum of allinterparticle and external forces. Thus, one writes Fi Fji F(e)(i 1, 2, · · · , N ) ,(11)ij iwhere Fji is the force that particle j exerts on particle i, and F(e)is the externaliforce on particle i. In (11) the sum over j runs from 1 to N but excludes j i. Theinterparticle forces are all assumed to obey the third law
Solved Problems in Classical MechanicsFji Fij(i, j 1, 2, · · · , N ) .(12)From (10) and (11) we have the equations of motion of a system of particles in termsof interparticle forces and external forces: dpi Fji F(e)idt(i 1, 2, · · · , N ) .(13)j iIf the masses mi are all constant then (13) can be written asmi d2 ri Fji F(e)i2dt(i 1, 2, · · · , N ) .(14)j iThese are the equations of motion for the classical N-particle problem. In general, theyare a set of N coupled differential equations, and they are usually intractable.Two of the four presently known fundamental interactions are applicable inclassical mechanics, namely the gravitational and electromagnetic forces. For theformer, Newton’s law of gravitation is usually a satisfactory approximation. Forelectromagnetic forces there are Coulomb’s law of electrostatics, the Lorentz force,and multipole interactions. Often, it is impractical to deduce macroscopic forces (suchas friction and viscous drag) from the electromagnetic interactions of particles, andinstead one uses phenomenological expressions.Another method of approximating forces is through the simple expedient of aspatial Taylor-series expansion, which opens the way to large areas of physics. Here, thefirst (constant) term represents a uniform field; the second (linear) termencompasses a ‘Hooke’s-law’-type force associated with linear (harmonic) oscillations;the higher-order (quadratic, cubic, . . . ) terms are non-linear (anharmonic) forces thatproduce a host of non-linear effects (see Chapter 13).Also, there are many approximate representations of forces in terms of variouspotentials (Lennard-Jones, Morse, Yukawa, Pöschl–Teller, Hulthén, etc.), which areuseful in molecular, solid-state and nuclear physics. The Newtonian concepts of forceand potential have turned out to be widely applicable – even to the statics anddynamics of such esoteric yet important systems as flux quanta (Abrikosov vortices)in superconductors and line defects (dislocations) in crystals.Some of the most impressive successes of classical mechanics have been in the fieldof astronomy. And so it seems ironic that one of the major unanswered questions inphysics concerns observed dynamics – ranging from galactic motion to acceleratingexpansion of the universe – for which the source and nature of the force are uncertain(dark matter and dark energy, see Question 11.20).1.3Newton and MaxwellThe above outline of Newtonian dynamics relies on the notion of a particle. The theorycan also be formulated in terms of an extended object (a ‘body’). This is the form
Introductionused originally by Newton, and subsequently by Maxwell and others. In his fascinatingstudy of the Principia Mathematica, Chandrasekhar remarks that Maxwell’s “ is ararely sensitive presentation of the basic concepts of Newtonian dynamics” and “ is socompletely in the spirit of the Principia and illuminating by itself . . . .” [5]Maxwell emphasized “ that by the velocity of a body is meant the velocity of itscentre of mass. The body may be rotating, or it may consist of parts, and be capableof changes of configuration, so that the motions of different parts may be different,but we can still assert the laws of motion in the following form:Law I. – The centre of mass of the system perseveres in its state of rest, or ofuniform motion in a straight line, except in so far as it is made to change that stateby forces acting on the system from without.Law II. – The change of momentum during any interval of time is measured by thesum of the impulses of the external forces during that interval.” [5]In Newtonian dynamics, the position of the centre of mass of any object is a uniquepoint in space whose motion is governed by the two laws stated above. The conceptof the centre of mass occurs in a straightforward manner[5] (see also Chapter 11) andit plays an important role in the theory and its applications.Often, the trajectory of the centre of massrelative to an inertial frame is a simple curve, eventhough other parts of the body may move in a morecomplicated manner. This is nicely illustrated by theQmotion of a uniform rod thrown through the air: to agood approximation, the centre of mass describes aPsimple parabolic curve such as P in the figure, whileother points in the rod may follow a more complicatedthree-dimensional trajectory, like Q. If the rod isthrown in free space then its centre of mass will move with constant velocity (that is,in a straight line and with constant speed) while other parts of the rod may have moreintricate trajectories. In general, the motion of a free rigid body in an inertial frameis more complicated than that of a free particle (see Question 12.22).1.4Newton and LagrangeThe first edition of the Principia Mathematica was published in July 1687, whenNewton was 44 years old. Much of it was worked out and written between about August1684 and May 1686, although he first obtained some of the results about twenty yearsearlier, especially during the plague years 1665 and 1666 “ for in those days I was inthe prime of my age for invention and minded Mathematicks and Philosophy morethan at any time since.” [5]After Newton had laid the foundations of classical mechanics, the scene for manysubsequent developments shifted to the Continent, and especially France, where[5]S. Chandrasekhar, Newton’s Principia for the common reader, Chaps. 1 and 2. Oxford: Clarendon Press, 1995.
Solved Problems in Classical Mechanicsimportant works were published by d’Alembert (1717–1783), Lagrange (1736–1813),de Laplace (1749–1827), Legendre (1725–1833), Fourier (1768–1830), Poisson (1781–1840), and others. In particular, an alternative formulation of classical particledynamics was presented by Lagrange in his Mécanique Analytique (1788).To describe this theory it is helpful to consider first a single particle of constant massm moving in an inertial frame. We suppose that all the forces acting are conservative:then the particle possesses potential energy V (r) in addition to its kinetic energyK 12 mṙ2 , and the force is related to V (r) by F V (see Chapter 5). So,Newton’s equation of motion in Cartesian coordinates x1 , x2 , x3 has components mẍi Fi V xi(i 1, 2, 3) .(15) Also, K xi 0, K ẋi mẋi , and V ẋi 0. Therefore (15) can be recast inthe formd L L 0(i 1, 2, 3) ,(16)dt ẋi xiwhere L K V . The quantity L(r, ṙ) is known as the Lagrangian of the particle.The Lagrange equations (16) imply that the action integral t2I t1L dt(17)is stationary (has an extremum – usually a minimum) for any small variation of thecoordinates xi :δI 0 .(18)Equations (16) hold even if V is a function of t, as long as F V .This account can be generalized: It applies to systems containing an arbitrary number of particles N . The coordinates used need not be Cartesian; they are customarily denoted q1 , q2 ,· · · , qf (f 3N ) and are known as generalized coordinates. (In practice, thechoice of these coordinates is largely a matter of convenience.) The correspondingtime derivatives are the generalized velocities, and the Lagrangian is a functionof these 6N coordinates and velocities:L L(q1 , q2 , · · · , qf ; q̇1 , q̇2 , · · · , q̇f ) .(19)Often, we will abbreviate this to L L(qi , q̇i ). The Lagrangian is required to satisfy the action principle (18), and this impliesthe Lagrange equations Ld L 0dt q̇i qi(i 1, 2, · · · , 3N ) ,(20)where L K V , and K and V are the total kinetic and potential energies ofthe system.[2]
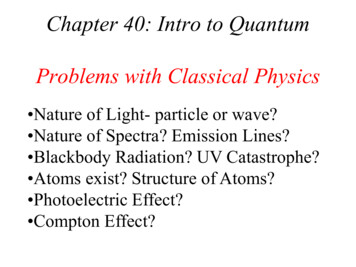
Introduction The Lagrangian formulation applies also to non-conservative systems such ascharged particles in time-dependent electromagnetic fields and damped harmonicoscillators (see Question 4.16). Lagrangians can also be constructed for systemswith variable mass. In these instances L is not of the form K V . The Lagrange equations (20) can be expressed as dpi dt Fi ,(21)where pi L q̇iandFi L qi(22)are known as the generalized momenta and generalized forces. In Cartesiancoordinates, p is equal to mass velocity. The action principle (18) is valid in any frame of reference, even a non-inertialframe (one that is accelerating relative to an inertial frame). However, in a noninertial frame the Lagrangian is modified by the acceleration, and Lagrange’sequations (16) yield the equation of motion (24) below – see Question 14.22.Although the Newtonian formulation (based on force) and the Lagrangianformulation (based on a scalar L that often derives from kinetic and potential energies)look very different, they are completely equivalent and must yield the same results inpractice. There are several reasons for the importance of the Lagrange approach, suchas: It may be simpler to obtain the equation of motion by working with energy ratherthan by taking account of all the forces. Constrained motion is more easily treated. Conserved quantities can be readily identified. The action principle is a fundamental part of physics, and it provides apowerful formulation of classical mechanics. For example, the theory can beextended to continuous systems by introducing a Lagrangian density whosevolume integral is the Lagrangian. In this version the Lagrangian formulationhas important applications to field theory and quantum mechanics.1.5Non-inertial frames of referenceThis section outlines a topic that is considered in more detail in Chapter 14 and isused occasionally in earlier chapters.Often, the frame of reference that one uses is not inertial, either by circumstance(for example, a frame fixed on the Earth is non-inertial) or by choice (it may beconvenient to solve a particular problem in a non-inertial frame). And so the questionarises: what is the form of the equation of motion in a non-inertial frame (that is, aframe that is accelerating with respect to an inertial frame)?This leads one to consider a frame S that is translating and rotating with respectto an inertial frame S. These frames are depicted in the figure below, where r is theposition vector of a particle of mass m relative to S and r is its position vector relativeto S . The frame S has origin O and coordinate axes x y z .
Solved Problems in Classical MechanicsThe motion of S is described by two vectors: theposition vector D(t) of the origin O relative to S, andthe angular velocity ω(t) of S relative to a third frame S that has origin at O and axes x y z , which are parallelto the corresponding axes xyz of S. This angular velocityis given in terms of a unit vector n̂ (that specifies theaxis of rotation relative to S ) and the angle dθ rotatedthrough in a time dt bydθn̂ ,(23)ω dtwhere the sense of rotation and the direction of n̂ are connected by the right-handrule illustrated in the figure.Starting from the equation of motion (8) for a single particle of constant mass min an inertial frame S, it can be shown that the equation of motion in the translatingand rotating frame S can be expressed in the form (see Chapter 14)d2 r Fe .dt2(24)Fe F Ftr FCor Fcf Faz ,(25)mHerewhereFtr md2 D,dt2FCor 2mω (26) dr,dtFcf mω (ω r ) ,Faz mdω r .dt(27)(28)(29)
IntroductionWe mention that (24) is not a separate postulate, but is a consequence of (8) andthe assumptions that space is absolute (meaning r r D in the first of the abovefigures), time is absolute (meaning t t), and mass is absolute (meaning m m).Note that the relation r r D is not simply a consequence of the triangle lawfor addition of vectors, because r and r are measured by observers who are movingrelative to each other – see Chapter 15.We can interpret the equation of motion (24) in the following way: if we wish towrite Newton’s second law in a non-inertial frame S in the same way as in an inertialframe S (i.e. as force mass acceleration), then the force F due to physicalinteractions (such as electromagnetic interactions) must be replaced by an effectiveforce Fe that includes the four additional contributions Ftr , FCor , Fcf , and Faz .Collectively, these contributions are variously referred to in the literature as: ‘inertial forces’ (because each involves the particle’s inertial mass m); ‘non-inertial forces’ (because each is present only in a non-inertial frame); ‘fictitious forces’ (to emphasize that they are not due to physical interactions butto the acceleration of the frame S relative to S).Each of the forces (26)–(29) also has its own name: Ftr is known as the translationalforce (it occurs whenever the origin of the non-inertial system accelerates relative toan inertial frame); FCor is the Coriolis force (it acts on a moving particle unless themotion in S is parallel or anti-parallel to ω); Fcf is the centrifugal force, and it actseven on a particle at rest in S ; Faz is the azimuthalforce, and it occurs only if the non-inertial frame has an angular acceleration dω dt relative to S.1.6Homogeneity and isotropy of space and timeIn addition to the fact that the laws of motion assume their simplest forms in inertialframes, these frames also possess unique properties with respect to space and time.For a free particle in an inertial frame these are: First, all positions in inertial spaceare equivalent with regard to mechanics. This is known as the homogeneity of space ininertial frames. Secondly, all directions in space are equivalent. This is the isotropy ofspace. Thirdly, all instants of time are equivalent (homogeneity of time). Fourthly, thereis invariance with respect to reversal of motion – the replacement t t (isotropyof time). These symmetries of space and time in inertial frames play a fundamentalrole in physics. For example, in the conservation laws for energy, momentum andangular momentum, and in the space-time transformation between inertial frames(see Chapters 14 and 15). In a non-inertial frame these properties do not hold. Forexample, if one stands on a rotating platform it is noticeable that positions on and offthe axis of rotation are not equivalent: space is not homogeneous in such a frame.Notwithstanding the fact that, in general, Newtonian dynamics is most simplyformulated in inertial space, one should keep in mind the following proviso. Namely,that the solution to certain problems is facilitated by choosing a suitable non-inertialframe. Thus the trajectory of a particle at rest on a rotating turntable is simplestin the frame of the turntable, where the particle is in static equilibrium under the
½¼Solved Problems in Classical Mechanicsaction of four forces (weight, normal reaction, friction and centrifugal force). Similarly,for a charged particle in a uniform magnetostatic field, one can
Solved Problems in Classical Mechanics Analytical and numerical solutions with comments O.L. de Lange and J. Pierrus School of Physics, University of KwaZulu-Natal, Pietermaritzburg, South Africa 1. 3 Great Clarendon Street, Oxford ox2 6dp Oxford Univ