Transcription
Diseño y compensación de sistemas en eldominio de la frecuencia1Compensación, es el termino que describe el ajuste de un controlador paralograr un mejor desempeño.De manera general se pueden clasificar como: Compensadores de atraso. Mejoramiento de la respuesta transitoria y uncambio pequeño en la precisión en estado estable, y puede acentuarlosruidos a altas frecuencias. Compensadores de adelanto. Mejoramiento de la precisión en estadoestable a costa de un aumento del tiempo transitorio, y suprime los efectosde ruido a altas frecuencias. Compensadores adelanto-retraso. Combinación de ambos, y eleva el ordendel sistema en 2 por lo que se vuelve mas complejo el sistema.
Compensador de adelanto de fase2Compensador de adelanto de fase Filtro pasa-altas que introduce undefasamiento positivo inferior a 90 , que permite aumentar el margen de fasedel sistema.Se utiliza el compensador en adelanto siguiente:sa s a ; donde 1Gc s ss a1 a1 ϕ-αa-aϕma ωm αa
Compensador de adelanto de fase3La función de transferencia sinusoidal es,j aGc j j 1 a1 (1)Y su ángulo de fase , j tan 1 tan 1 a a Usando la identidad,tan m Haciendo 1 y 2 a a tan 1 tan 21 tan 1 tan 2 1 a a m tan 1 a a (2)
Compensador de adelanto de faseSimplificando,Reordenando, a a 1 a 2 m tan a 2 2 a 24 tan 1 a 1 22 a 1 m tan 1 a a (3)Para obtener el máximo de (3), derivamos el argumento e igualamos a cero, 1 d a 1 1 a d ma 2 a 02d d a a
Compensador de adelanto de faseDe lo cual se obtiene,1 a 0a 2resolviendo, 2 a 2La fase máxima ocurre en, m a 5Sustituyendo este valor en (3), se obtiene, 1 m tan 1 a a a a tan 1 1 tan 1 1 2 Cuyo ángulo corresponde al triangulo rectángulo de la figura, 1 1 m2 1 1 m sen 1 (4)
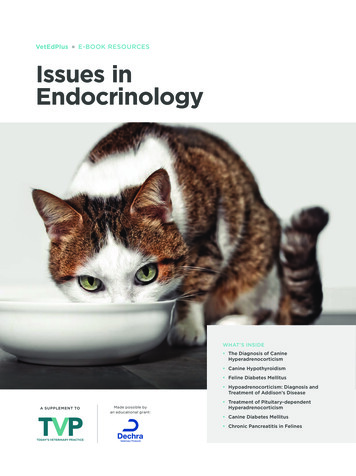
Compensador de adelanto de fase6El máximo ángulo de un compensador de adelanto es menor a 90̊, en lapractica los valores de α mas grandes son de 20 y corresponden a ϕm 64.8̊ϕm7060504030201002468101214161820α
Compensador de adelanto de faseDiseño de la función de transferencia dados ϕc y Mc a unafrecuencia ωc7Este diseño se basa en el conocimiento previo del margen de fase y deganancia del sistema a controlar, así como la frecuencia a la que se requierenlos parámetros. Se parte de la expresión (2), la cual se reescribe como: 1 1 a a c 2 a a a q tan c 2222 a c a ca 2 a 2 c simplificando,O bien, c 1 aq tan c 2 c a q tan c c 1 ; 2 a(4a)(5)
Compensador de adelanto de faseDiseño de la función de transferencia dados ϕc y Mc a unafrecuencia ωc8Por otra parte, la magnitud del compensador, se obtiene a partir de (1),G j definiendo, c2 2 a 2 2 c2 2 1 2 c 2 2 a 2a c 22 2 c a 1 c2 2 a 2 2 a Usando c 2 2 a 2ca , se obtiene:2 2 c 1 a 2 c 2 a 2 2 1 c 2 2Transformando la magnitud en decibeles, se tiene,12 c 20 log10 G j 20 log10 c 20 log10 c12(6)
Compensador de adelanto de faseDiseño de la función de transferencia dados ϕc y Mc a unafrecuencia ωcAsí,c G j 102 c109 2 2 1 2 2donde esta en dBcReacomodando (6) se tiene,2 c 2 c 2 2 c 1 a a c c c 2 2 2 c a a 22 c 22 c 1 c a 2 Por lo tanto, c 1 c 2 c a 222(7)
Compensador de adelanto de faseDiseño de la función de transferencia dados ϕc y Mc a unafrecuencia ωc10Ahora se tiene la información necesaria para resolver (5) y tener una ecuaciónque determine α. Elevando al cuadrado (5) y reescribiendo,22 c 222 c 2 q 1 a a Desarrollando el cuadrado,2 c 4 c 2 22cq 2 1 a a a 2Sustituyendo (7) en la expresión anterior se tiene, 4 c 1 2 2 3 c 1 2 c 1 22 q 1 2 c 2 2 c 2 c 2 Multiplicando por q 2 4 c 1 2 3 c 1 2 c 2 2 c2 c 1 1 2q 2 2 2 c 1 2 3 c 1 2 c 2 2 c2222 c 1 1 222 c2 c
Compensador de adelanto de faseDiseño de la función de transferencia dados ϕc y Mc a unafrecuencia ωcReacomodando términos, q 2 2 2 c 1 2 3 c 1 2 c 2 2 c2 c 1 1 222El término del lado izquierdo pude verse como un cuadrado perfecto, q 2 2 c 1 2 cdesarrollando,factorizando, 22 q 2 2 2 c c 2 c 1 1 2 c22 2 q 2 2 1 c 2 c 1 1 2 c2simplificando,2 2 q 2 c c 1 2 cdesarrollando,2 q 2 2 2 c c 2 c 2 c 2 2 cArreglando en términos de α, q2 q 2 2 1 c 2 c 1 1 2 c2finalmente, 2 c 1 1 2 c c 1 2 2q 2c q 2c c 1 c 0 112 c
Compensador de adelanto de faseDiseño de la función de transferencia dados ϕc y Mc a unafrecuencia ωc q2 c 1 2 2q 2c q 2c c 1 c 012(8)Analizando la ecuación cuadrática resultante, observamos que:1) q 0 con lo cual ϕc 02) c 1 de tal forma que Gc 1 c 03) c q 2 1Así, para cual ϕc 0 y µc 0 se podrá encontrar un compensador de adelantocon α 1.Finalmente, una vez resuelta la ecuación cuadrática de (8), se utiliza (7) paraobtener el parámetro a. c 2 ca c 1(9)
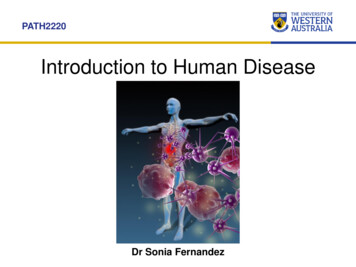
Implementación del Compensador de adelantode faseEl sando13amplificadoresZ2R4C1R2Vi s R1Vx s R3V0 s Para determinar su función de transferencia se consideran las impedancias dela primera etapa.
Implementación del Compensador de adelantode fase 1 R1 Cs1R1Z1 R1 // 1 C1s R 1R1C1s 11C1s 1 R2 Cs1R2Z 2 R2 // 2 C2 s R 1R2C2 s 12C2 sLa ganancia de la primera etapa es,R2Vx s ZR R C s 1R C s 1 1 2 2 2 1 1R1Vi s Z2R1 R2C2 s 1R1C1s 1La ganancia de la segunda etapa es,V0 s R 4Vx s R3Por lo tanto la ganancia total del circuito es,V0 s R2 R4 R1C1s 1 Vi s R1 R3 R2C2 s 114
Implementación del Compensador de adelantode faseReacomodando,Y simplificando, R1C1 s 1 R1C1 V0 s R2 R4 Vi s R1 R3 1 R2C2 s R2C2 Gc s 1 s RCV0 s R4C1 1 1 Vi s R3C2 1 s R2C2 15s as aComparando con la función de transferencia del compensador se deduce,a 1R1C1 a 1R2C2 R4C1R3C2Para que el circuito opere como una red de adelanto se debe cumplir que: R1C1 R2C2
Implementación del Compensador de adelantode fase16Ejemplo. Determine la función de transferencia de un compensador enadelanto que proporcione un adelanto de fase de 40 grados y una ganancia deω 9 dB en 7 rad/seg. Diseñe los parámetros de un circuito para implementardicho compensador.
Compensador de atraso de fase17Compensador de atraso de fase Filtro pasa-bajas que introduce undefasamiento negativo , que permite disminuir el margen de fase del sistema.Se utiliza este tipo de compensador con la finalidad de mejorar la exactitud enrégimen estacionario a expensas de afectar el tiempo de establecimiento y larobustez; el compensador tiene la siguiente función de transferencia:Gc s 1 s a; donde 1 s as b; donde 1s b11 , b a, b aGc s O bien: (10)ϕβbωmb-b-ϕm-βb
Compensador de atraso de fase18De manera similar al compensador de adelanto, se tiene:o Máximo defasamiento negativo: m b o Angulo: m sen 11 sen 11 (11)o De manera similar, aprovechando la ecuación cuadrática calculada para elcompensador en adelanto, se tiene:(12) q2 c 1 2 2q2c q2c c 1 c 0en este caso se requiere 0 c 1 y q 0 para asegurar que los coeficientes de βsean positivos.Por lo que habrá una solución real positiva para β si q2c c-1 0, para tener unaraíz positiva de β, se tiene: b c 2 cc 1(13)
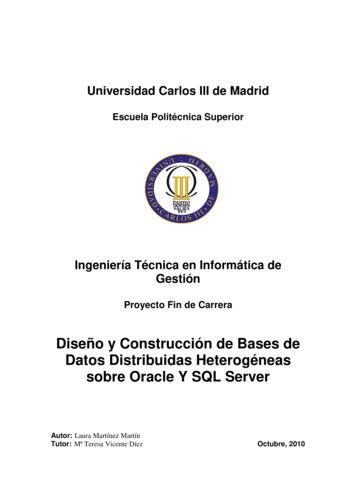
Implementación del Compensador de atraso defase19El compensador puede ser implementado usando amplificadoresoperacionales en su configuración de seguidores, para evitar el efecto decarga.Z1R1Vi s Vx s R2Z2Vy s V0 s CPara determinar su función de transferencia se consideran las impedancias.
Implementación del Compensador de atraso defase201 Vx s R2 Z V s Cs Vx s R2Cs 1 Vy s 2 x 1Z1 Z 2R1Cs R2Cs 1R1 R2 CsComo, Vy s V0 s yVi s Vx s entonces,V0 s R2Cs 1 Vi s R1Cs R2Cs 1Reordenando la ecuación con el fin de compararla con (10), se tiene, 1 R2C s R2C V0 s Vi s Cs R1 R2 1 1 1 R2C s R2 s R2C R2C 11 R1 R2 s C R1 R2 s C R1 R2 C R1 R2 donde, R2R1 R2b 1R2C b 1C R1 R2
Implementación del Compensador de atraso defase21Ejemplo. Diseñe un compensador de atraso con un ángulo de 45̊ y unaatenuación de 10dB en ω 2 rad/seg.
Compensador de adelanto-atraso22Compensador de adelanto-atraso La combinación de ambas estrategiaspermite eliminar el error en estado estacionario y ampliar el ancho de bandapara tener un grado aceptable de estabilidad relativa.Su función de transferencia esta dada por,Gc s s as b s a s b(14)Considerando αβ 1, α 1 y a b, se puede escribir como,Gc s s a s bs a s b aϕ-αa-α-b-βbβbbαa
Diseño de la función de transferencia de uncompensador adelanto-atraso a partir de φc y µcpara una ωc23Para obtener la ecuación que permita diseñar los parámetros del controlador,se tiene que tomar en cuenta que el margen de ganancia del compensadordebe ser negativo (µc 0) y ωc debe ser mas grande que b.El diseño puede ser simplificado si se considera que la parte de atraso produceuna atenuación de 20log β en ωc y solamente un pequeño ángulo de fase ϕ2(de 1 a 5). Así, la parte de adelanto se diseñara para obtener una pequeñaganancia con adelanto de la fase igual a ϕc ϕ2 en ωc.Por lo tanto, partiendo de (14) y tomando en cuenta las consideracionesdescritas, se tiene, c 20 log10 20 log10 c2 a 2 c2 2 a 2si 1 Utilizando las propiedades de los logaritmos, c2 a 2 a c 20 log 2c22 1 c2 a 2 2 a a 20 a 2 20 log 20log log22 222 2 1 c2 2 a 2 c a a 2 c a 2c22c2 12
Diseño de la función de transferencia de uncompensador adelanto-atraso a partir de φc y µcpara una ωcSimplificando,24 c 1a c 10 log 2 c 2 a 1Se sabe que: c 2 20 log10 c , por lo tanto2 c 1ac 2 c 2 a 2Reordenando la expresión a fin de obtener el para metro a , se tiene: c c c 2 c 1 a a 22 c 2 c 1 c 1 a 2Finalmente, despejando a,a cc 11 c 22 c 1 c c 1 a 2(15)
Diseño de la función de transferencia de uncompensador adelanto-atraso a partir de φc y µcpara una ωc25Para el ángulo de fase son tomadas en cuenta las consideraciones de diseño(fase igual a ϕc ϕ2 en ωc) que fueron tomadas en cuenta para la parte deadelanto, c 2 tan 1 c tan 1 c a a por lo tanto, si se toma la expresión (4a) se tiene, c 1 aq tan c 2 2 c a Sustituyendo (15) en la expresión anterior se obtiene,12 2c 1 1 121221 c c 11 c 1 q 1 c 2c 1 2c 1 1 c
Diseño de la función de transferencia de uncompensador adelanto-atraso a partir de φc y µcpara una ωcReordenando términos, q 2 1 c 2c 1 2c 1 1 c 1 22Factorizando el lado izquierdo, q 2 1 1 c 2c 1 1 c 1 2Simplificando,2q 2 1 c 2c 1 1 c 2Desarrollando el cuadrado y lado derecho de la ecuación, q 2 1 2 c 2c 2 2c 2c 2 1 cResolviendo para α , se obtiene la siguiente ecuación cuadrática, q c c 1 c 2q c q2222 c 1 0En este caso las condiciones para obtener un valor positivo de α son:1. q2c c – 1 02. O bien c 1/(q2 1)26
Diseño de la función de transferencia de uncompensador adelanto-atraso a partir de φc y µcpara una ωc27Para diseñar la parte del compensador de atraso, se tiene que determinar elvalor de b, de tal manera que el compensador contribuya con una fasenegativa φ2 en ωc, de esta manera su ángulo será: 2 tan 1 c tan 1 c b b Usando la identidad trigonométrica,tan 2 cb c b 11 c b 21Factorizando y utilizando , tenemos c 1 btan 2 2 c 1 b
Diseño de la función de transferencia de uncompensador adelanto-atraso a partir de φc y µcpara una ωc28Reacomodando la ecuación,2 b b c 1 1 c c tan 2 b222 c b b 1 b c c Resolviendo para el factorb c, b c 2 b 1 c tan 2 Así, b 1 b 0 c tan 2 c 2Al resolver esta última ecuación se debe elegir la raíz positiva que tenga elmenor valor de b.
Implementación del Compensador de adelantoatraso29La siguiente figura muestra la implementación del compensador de adelantoatraso.Z1C1R1Vi s Vx s R2Z2Vy s V0 s CPara determinar su función de transferencia se considera el divisor de tensiónformado por las dos impedancias.
Implementación del Compensador de adelantoatrasoZ1 R1 //1R1 C1s R1C1s 1Z 2 R2 //1R2 C2 s R2C2 s 1Así, tenemos que R C s 1 R C s 1 Vx s 2 2Vx s 2 2CsCsZ V s 22 Vy s 2 x R1R C s 1 R1C2 s R1C1s 1 R2C2 s 1 Z1 Z 2 2 2 R1C1s 1 C2 sR1C1s 1C2 sSimplificando,Vy s R1C1s 1 R2C2 s 1 Vx s R1C2 s R1C1s 1 R2C2 s 1 Como, Vy s V0 s y Vi s Vx s entonces, R1C1s 1 R2C2 s 1 V0 s Vi s R1C2 s R1C1s 1 R2C2 s 1 30
Implementación del Compensador de adelantoatrasoO bien, 1 1 s R1C1 R2C2 s RCRCV0 s 1 1 2 2 2Vi s R1C1 R2C2 s R1C2 R1C1 R1C2 s 1Simplificando la expresión, 1 1 s s R1C1 R2C2 V0 s Vi s 111 1 s s 2 R2C2 R1C1 R2C1 R1C1 R2C2Comparando los factores del numerador con (14), se observa que:a 1R1C1b 1R2C2y comparando los factores del denominador desarrollado de (14), se obtiene:a b 1 a bR2C11 1 a 1 bR2C131
Implementación del Compensador de adelantoatraso32Ejemplo. Diseñe un compensador de adelanto-atraso con un ángulo de 45̊ yuna atenuación de 10dB en ω 6 rad/seg.
Diseño de Compensadores Utilizando Diagramasde Bode33No se requiere conocer la función de transferencia de la planta para diseñar elsistema de control, se puede obtener de un diagrama experimental.Requerimientos: Especificar los coeficientes de error en estado estable kp o kv. Margen de fase φm Margen de ganancia Gm La frecuencia de corte ωc (velocidad de respuesta)Procedimiento:1. Ajustar la ganancia de lazo, para satisfacer la especificación del error enestado estable.Para calcular el error en estado estable de un sistema con retroalimentaciónunitaria se utiliza el teorema del valor final,sR s s 0 1 G s pess limDonde R(s) es la entrada. Si la entrada es considerada como una rampa deamplitud A y además se define a Gp(0) como la constante de error de posición(kp), se tiene
Diseño de Compensadores Utilizando Diagramasde Bode34AAsess lim s 0 1 G s 1 G p 0 psDonde la constante de error es:k p lim G s s 0De tal manera que el error del seguimiento para una entrada escalón, estarádado por,Aess 1 k pAhora, si se considera una entrada tipo rampa, y además el sistema tiene unintegrador, se tiene,A2AAsess lim lim lims 0 1 G s s 0 s sG s s 0 sG s pppsEn este caso el error en estado estable se obtiene de,ess Akv
Diseño de Compensadores Utilizando Diagramasde Bode35Donde kv es definida como la constante de error de la velocidad, y se calculacomo,kv lim sGp s s 02. Se obtiene el margen de fase de la función de transferencia de lazo abiertoincluyendo el ajuste de ganancia, pero sin compensar, conviene tambiéntener una tabla de valores.3. Si la función de transferencia no satisface la especificación del margen defase, se debe incluir un compensador de adelanto, atraso o de adelantoatraso en cascada con la planta.4. Seleccionar el tipo de compensador Para un compensador de adelanto, la ganancia en la frecuencia de crucedebe ser negativa y el atraso de fase debe ser mayor de 180 grados Para un compensador en atraso, la ganancia en la frecuencia de crucedebe ser positiva, y el atraso de fase debe ser menor de 180 grados Para el compensador de adelanto-atraso, la ganancia a la frecuencia decruce deseada debe ser positiva, y el atraso de fase debe ser mayor de 180gradosPara todos los casos, la magnitud del corrimiento de fase proporcionado por elcompensador debe ser menor a 90 grados, preferiblemente menor de 70.
Diseño de Compensadores Utilizando Diagramasde Bode36Las consideraciones pueden ser resumidas en el siguiente diagrama dor en adelanto.- (punto A) provee un adelanto igual a φ1 y unaganancia igual a 1/M1, en la frecuencia ω1. (M1 1)Compensador en atraso.- (punto B) provee un ángulo de atraso φ2 y unaganancia 1/M2, a la frecuencia ω2. (M2 1)Compensador en adelanto-atraso.- (punto C) provee un adelanto igual a φ3 yuna ganancia igual a 1/M3, en la frecuencia ω3. (M3 1)
Diseño de Compensadores Utilizando Diagramasde Bode37La elección del compensador depende de la aplicación particular a resolver. Lasiguiente tabla resume las características mas importantes de los trescompensadores.Tipo de compensadorAdelantoEspecificaciones c 1amplificación c1 20 log10 1 dB c 1 c 2Atrasoatenuaciónc2 20 log10 2 dB c 2 c 3Adelanto-atrasoatenuaciónc3 20 log10 3 dB c 3
Diseño de Compensadores Utilizando Diagramasde Bode38Ejemplo compensador en adelanto.- Considere la función de transferencia deuna planta en lazo abierto y diseñe un compensador de adelanto de fase quecumpla con las siguientes especificaciones:o Proporcionar un error en estado estacionario ante una entrada escalónunitario menor del 1%o Proveer un margen de fase de 45̊G p s s 2 s 0.1 s 2 10s 29
Diseño de Compensadores Utilizando Diagramasde Bode39Ejemplo compensador de atraso.- Para la función de transferencia de lazoabierto, diseñe un compensador de atraso de fase que cumpla con lassiguientes especificaciones:o Proporcionar un error en estado estacionario ante una entrada rampa, paratener una constante de error de velocidad de kv 20o Proveer un margen de fase de 45̊G p s k2s s 10
Diseño de Compensadores Utilizando Diagramasde Bode40Ejemplo compensador de adelanto-atraso.- El sistema de control delembobinado de un rotor se muestra en la figura, el objetivo del sistema esautomatizar el proceso para bobinar un cable de cobre en rotores de motoresde pequeña capacidad.En el diagrama mostrado cada motor tiene tres arrollamientos separados devarios cientos de vueltas de cable. En este sistema el operador únicamenteinserta un rotor completamente bobinado.El motor de CD se utiliza para lograr arrollamientos precisos y rápidos, por locual, el objetivo es lograr una alta precisión en estado estacionario tanto parala posición, como para la velocidad.Diseñar un compensador de adelanto-atraso para proporcionar al sistema unmargen de fase de 50̊ , considerando una constante de error de velocidad dekv 10.
Diseño de Compensadores Utilizando Diagramasde Bode41Suministro de aireMotor de pasosreferenciaMotor de CDCuña de airecontroladorLazo de arrollamientosCable de armaduraG p s 1s s 5 s 10
Diseño y compensación de sistemas en eldominio de la frecuenciaReferencia,Lázaro Castillo I.I., 2008, Ingeniería de Sistemas de Control Continuo, EditorialUniversitaria.42
Diseño y compensación de sistemas en el dominio de la frecuencia 1. Compensador de adelanto de fase Filtro pasa-altas que introduce un defasamiento positivo inferior a 90 , que permite aumentar el margen de fase . ganancia del sistema a controlar, así como la frecuencia a la que se requieren los parámetros. Se parte de la expresión (2 .