Transcription
Core Flight Software projects onOrion Multi-Purpose Crew VehicleFlight Software WorkshopDecember 3, 2018Lorraine E. Prokop, Ph.DNASA – Johnson Space Center / ER6lorraine.e.prokop@nasa.gov
Outline Orion Program Overview CFS Projects on Orion– Orion Ascent Abort 2 Flight Test– Optical Navigation Software– Backup Flight Software2
Orion Vehicle3
Orion Program Mission Schedule (Wikipedia)MissionAcronymRocketCrewedLaunch dateStatusOrion LASNoMay 6, 2010SuccessExploration Flight Test 1 EFT-1Delta IV HeavyNoDecember 5,2014SuccessAscent Abort Test 2AA-2Orion Abort TestBoosterNoApril 2019Exploration Mission 1EM-1SLS Block 1 CrewNo2020Exploration Mission 2EM-2SLS Block 1B CrewYes2023Exploration Mission 3EM-3SLS Block 1B CrewYesExploration Mission 4EM-4SLS Block 1B CrewExploration Mission 5EM-5Exploration Mission 7Pad Abort 1PA-1DurationDestination95 seconds4 hours,24 minutes,two orbitsLess than 3minutesTroposphere26–40 daysLunar orbitUnderdevelopment8–21 daysMulti TLI freereturn flightBetween 2023and 2024Planned16–26 daysGateway stationYes2025Planned26–42 daysGateway stationSLS Block 1B CrewYes2026Planned26–42 daysGateway stationEM-7SLS Block 1B CrewYes2027Planned191–221 daysGateway stationExploration Mission 9EM-9SLS Block 2 CrewYes2029Planned1 YearLunar orbitExploration Mission 11EM-11SLS Block 2A CrewYes2033Planned2 yearsMartian orbitUnderdevelopmentUnderdevelopmentHigh Earth orbitStratosphereCurrent CFS Projects in Development/Test4
Exploration Mission 1 Overview5
Exploration Mission 2 Overview6
CFS Projects On Orion CFS Projects on Orion Missions– Orion Ascent Abort 2 Flight Test CFS Framework for Primary Flight Software Hardware: AiTech SP0 processor Operating System: VxWorks– Orion Exploration Mission 1 & 2 Vision Processing Unit (VPU)– Backup Flight Software» EM-1: Entry phase, EM-2 & beyond: All Flight Phases– Hardware: Sparc LEON 3– Operating System: VxWorks Camera controllers Units – Crew Module & Crew Module Adapter– Camera controlling software (still image & motion video)– Optical Navigation Software– Hardware:Intel NUC– Operating System: Ubuntu-647
AA-2 Project IntroductionAscent Abort 2 (AA-2) Flight Test AA-2 is a Development Flight Test for the Multi Purpose Crew Vehicle (MPCV) Program Single launch planned for April 2019 from Space Launch Complex 46 AA-2 will test the LAS under flight-like conditions to help certify the system for crewedmissions AA-2 uses a surrogate low cost, less complex booster and Crew ModuleAA-2 Avionics & Software Designing to use COTS avionics wherever possible Dual string design using cFE/CFS on VxWorks Reuse of ANTARES Trick Simulation CFS wrapped GNC Matlab/Simulink Autocode from mainline MPCVOrionApollo PadAbort TestApollo AscentAbort Test(Little Joe IIBooster)Orion Pad AbortTestAA-2 Flight TestVehicle
AA-2 Flight Test ProfileAA-2 Flight Test Profile50,00045,000Reorient CompleteBegin Reorientation40,0005 LAS Jettison43Altitude (feet)35,00030,0002 Initiate AbortLAS/CM Separate from ATB25,00020,00015,00010,0005,000Note: Trajectory and event times arebasedon preliminarydata.LAS,CM Impact1 ATB Ignition6612345678Downrange (statute miles)9ATB Impact101161213
High-Level AA-2 Avionics ArchitectureSIGISIGI1553 BusPDUFlightComputer 1FlightComputer 2DFIPCU, BatteryPCU, BatteryEDREthernet & RS422 BussesCM & LAS Interface, RS422 & Discrete PyroCM – Crew ModuleCmd - CommandLAS – Launch Abort SystemPCU – Pyro Control UnitDFI – Development Flight InstrumentationSIGI – Space Integrated GPS/INSGPS – Global Positioning SystemINS – Inertial Navigation SystemTlm - TelemetryPDU – Power Distribution UnitLASPyros10
AA-2 Top Level Software Block DiagramFlight SoftwareTool ChainEDRCFSCoreAppsAA-2 CustomApplicationRasberry PiAA-2 AutocodeCFS Infrastructure (Goddard)VMWare (local PC/Mac)Eclipse (local IDE)Scientific Linux (local WS OS)GNU C/C , Java (compile/Xlate)UCC (code count metrics)Understand (standards checker)Bitbucket/Git (CM)JIRA (change tracker)Bamboo (continuous integration)mREST (Test Framework)Windriver WorkbenchVxWorks Operating SystemAitech SP0 Processor, cPCII/O Devices (NAI)Ground SoftwareEDGE VisualizationSimulation SoftwareSpecific System & I/O Models(RAMTARES)Dynamics, Time, EnvironmentJEOModelsDGeneric SystemsModelsValkyrieDecom SystemPayload Telemetry Processor12- 8 bit down select &packetizationScriptsDisplays &ControlsTestFrameworkDatabase(postgreSQL)Command &DataDictionaryITOS Infrastructure (Goddard)Trick Simulation Core (JSC)Linux OS(Data Com/Decom, Recon, Distribution, Display, Scripting,Recording, Post processing)Linux OSLinux OS11
AA-2 Flight Software ArchitectureSSRs, Avionics temps, voltage,etc.Pyros, ATBdiscrete signalsA IO(40Hz)SIGIEDR1553(40 Hz)Framed CCSDS1.28 Mbps (combined)Launch Abort SystemDFIEthernetManchesterEncodedRS-422LASI/O(40 Hz)TelemetryOutputSerial(40 Hz)TelemetryOutput(40 Hz)CommandIngest(10 Hz)HouseKeeping(10 Hz)Scheduler /Sync(40 Hz)SIGIIO(40 Hz)RS-422D IORS-422 (two channels)EDRIOAutomatedFlightManager(AFM)GNC 40 Hz(40Hz)GNC 1 Hz(1Hz)(40Hz)(40 Hz)Inter-task Message Router (SW Bus – ServicescFE Core ServicesCFS Configurable ApplicationsEventServicesTableServicesMission Specific I/O AppsMission Specific Apps
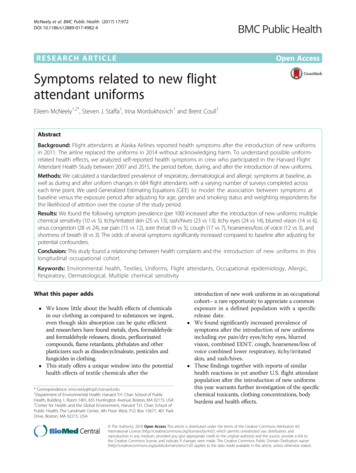
Optical Navigation Project Overview Background Optical Navigation (OpNav) Application Software– NASA/JSC/Engineering Directorate Government Furnished Equipment (GFE) softwareproject authorized October 2016, delivered April 2018– Orion (EM-1, EM-2) software producing navigation data for onboard GNC flight control inthe event of loss of communication with ground Determines position and range of spacecraft based on optical image recognition of either earth ormoon from images taken by dedicated fixed-mounted camera (Pixelink) on bottom of OrionCommand Module Self calibrates images onboard prior to navigation use by imaging starfields, high accuracyrequired– Functions as Orion backup navigation sensor in the event of comm loss Orion requires nav updates from ground, if comm is lost, poses LOC/LOM risk during entry Provides autonomous navigation updates upon Loss of Comm Class A Safety-Critical Software– For EM-1, images taken every 30s during approximately 8, 2-hour “passes” Dedicated “calibration passes” image star field to determine camera distortion & orientationDedicated “imaging passes” image earth or moon to derive navigation solutionFunction validated on “outbound leg” to moon for EM-1, evaluated as a DTO for this phaseActivated on the “inbound” from moon for loss-of-comm– Solution fed to Orion FCM-GNC and downlinked– Located in Camera Controller (CC) unit on Orion EM-1 vehicle, Linux computer runningthe Core Flight Software (CFS) framework
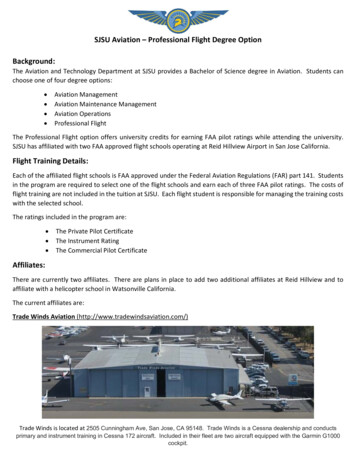
How Optical Navigation Works Still images of Moon or Earth are processed to find apparent angulardiameter and centroid in camera focal planeRaw data is transformed into range and bearing angle measurements usingplanetary data and precise star tracker inertial attitudeMeasurements are sent to the main flight computer’s Kalman filter to updatethe onboard state vectorImages are collected over an arc ( 2hrs) to converge the state and estimatevelocityThe same basic technique was used by Apollo to satisfy loss-of-comm, butApollo used manual crew sightings with sextant instead of autonomouslyprocessing optical imageryApolloSpace Sextant14
Loss of Comm Navigation15
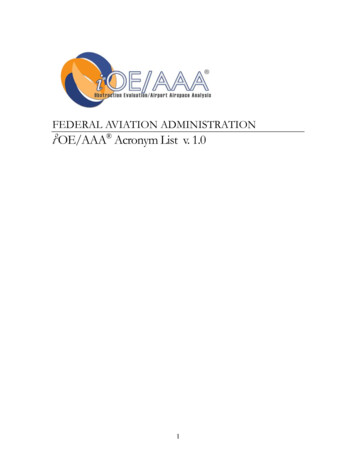
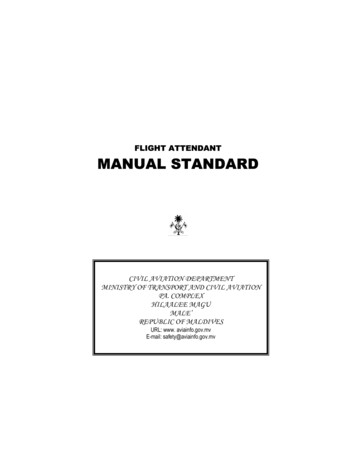
MPCV Camera LocationsStar Tracker & OpNav Camera LocationsStar Tracker 2OpNavCameraStar Tracker 1with RCS PlumeShield
OpNav System Architecture17
OpNav Application Software ArchitecturePixelink CameraDrivers, I/O Apps(64-bit)OtherMissionSpecific CFSAppsApplicationLayer AppOpNav CFS ReuseAppsAppcFE (core Flight Executive)ServicesOperating System AbstractionLayer (OSAL)Platform Specific Package(PSP)PixelinkOpNavCameraGoProAppOpNav withinCFS Layered FrameworkOpNavFileDataHouseKeeping(HK)File nager(FM)File SystemMass StorageVideo,Still mand(SC)CFS Application Framework (32-bit)Inter-task Message Router(Software Bus – utiveServicesOpNav App & DataCFS Core ServicesCFS Reuse AppsVideo System (VID) AppsOpNavApplicationSoftwareTableServicesExternal I/O Apps:DEM telemDEM cmdUDP I/O(via Data Util Network)VEPC I/O (via RS-422)(1 Hz)Data To/From Vehicle SystemsData To/From Ground18
Orion EM-1 OpNav Pass Visualization19
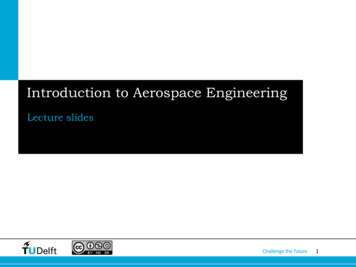
Practice Earth Pass Sample Image, TrajectoryTime 3906520
8.5.5 Cert 2 Backup Moon Pass SampleImage, Trajectory Time 41527521
Sample Off Nominal – Earth and Moon in Imageduring DRO22
Over-Underexposures (exposure bit) for eachPass23
Orion Backup Flight Software Human-rated spacecraft requires high degree of redundancy / fault tolerance– Redundant hardware systems (example: quad-voting systems)– Redundant software systems If primary software fails to operate, backup system is needed Backup Flight Software (BFS) exists to mitigate the risk of software common cause failure in theprimary flight system– Strive for dissimilarity in all life cycle phases, process, tools, platform, etc.Orion backup software– EM-1 BFS written to support backup during Entry– EM-2 BFS will be expanded to support all flight phases EM-2 project started October 2018– Joint team with NASA and Lockheed-Martin (Orion prime contractor)» Mix of C & C applications running within CFS framework» LEON3 processor» VxWorks OS Reduced set of capabilities compared to primary, but can “take over” in event of a primarysoftware failure– Complete dynamic flight events such as ascent, entry, and burn targeting– Maintain knowledge and control of vehicle attitude and state during quiescent flight phases– Maintain control of life support, power, and communication systems– Monitor and mitigate crew environmental hazards– Provide manual commanding and piloting capabilities to the crew24
Orion BFS vs. Primary ToolchainItemHardware and Operating SystemCPUOperating System / compilerFrameworkDevelopment Tools / LanguageAlgorithm ImplementationDevelopment Environment(s)BFSPrimary FSWLEON 3VxWorksCFS FrameworkPPC-750Green Hills IntegrityARINC653Hand-CodedEclipse, VxWorks WorkbenchAuto-generated C Rhapsody/Green HillsProgramming Language(s)C or C Software, Documentation, and Data Configuration ManagementData ManagementCCDD - ODSIn-Flight ReconfigurationCFE tablesDocumentation StorageNASA SharePoint, WindchillRequirements LinkageExcel, DOORSCMGit - PerforceC ODSSLDBWindchillRhapsody, DOORSPerforceDocumentation ToolsIntegration, Test, and SimulationUnit Test Framework (UTF)Code CoverageStatic/Standards AnalysisCode ReviewMicrosoft Office, Doxygen, DOORS, WindchillRhapsody, DOORSGoogleTest & UTAssertgcov (Linux and VxWorks)ucc code check, cpp checkGitlab, Crucible / Code CollaboratorLDRALDRAKlockworkCrucible/Code CollaboratorSimulation / TestDevelopment Process / StandardsCoding StandardsRAMTARES, CFS Test Framework, OrionSim OrionSimSoftware Development ProcessC – NASA, C - Orion SDPOrion SDPNPR 7150.2B, BFS SDP AddendumNPR 7150.2, Primary SDP25
High-Level Orion Avionics ArchitectureVPUBackup Flight SoftwareVxWorks, CFS, mary FSWIntegrityARINC653 OS,PPC 750Onboard Data Network (time triggered)Utility NetworkACU – Audio control UnitCC – Camera ControllerCCM – Communications Control ModuleCFS – core Flight SoftwareDCM – Display Control ModuleDU – Display UnitFCM – Flight Control ModuleFSW – Flight SoftwareODN – Onboard Data NetworkVMC – Vehicle Management ComputerVPU – Vision Processing UnitCCCC (opnav)26
EM-2 Backup Flight Software Architecturewithin VPU’s CFS Framework(Planning Purposes)bfs shared libsBFSLib(C , C?Lib)GNCLib(CommonGNC)BIFBFS I/FLib)cfeHS(Health ftwareBusExcutiveServicesPRP(PropMon & Mgmt)20 HzSOL -SolarArrays & PwrMon&Ctrl1 HzGCE(Entry Guid &Ctrl)40 HzNAV(Navigation)40 Hzgnc appsGSM(SM Guidance)CSM(SM Control)40 Hz40 HzFM(FileManager)MP(ManualPiloting)40 HzDS(Data Store)MCrefsFile SystemCF(CCSDSFile Xfer)CFS Software Bus10 HzVpud libs Vpud LimitChecker)(EM-1 only)MM(MemMgr)UDPVHCOdlCS(checksum)vpudData To/From ODNCFS Core ServicesCFS Framework & appsVPU and CC/VIDCFS Reuse AppsBFS-Mission Specific Apps/SequencesEM1 BFS Apps/SequencesBFS LibrariesL. Prokop 1/7/2019SCH(Scheduler)SBNxCmtVPUD Mission Specific Applications(ManualCommanding &Routing)HK(housekeeping)SCB(StoredCommand –Sequencer)(40Hz)LCB(BFS LimitChecker)(hazards)40 HzBEX(BFSExecutive)40 HzECS(EnvironmentCtrl &Suits)1 Hz MULTIDISIPLINARY Custom App (BFS & VPU requirements) BFS condition & hazard monitoring Mode change events Sequence Triggering Possible refactor BEX from EM-1MULTIDISIPLINARYModified SC for higher rate timeresponse, sub second timesMulti-Discipline Cmd Sequences(RelTime & AbsTime: Ascent Sequences Entry Sequences Config heaters Config pressurization Manual Burn Attitude BFS Config sequences CM RCS prop pressurize Functions of EVE (EM-1’s EVE Apprefactored possibly) Possible Incorporate BEX from EM-1
Backup Questions?28
Outline Orion Program Overview CFS Projects on Orion - Orion Ascent Abort 2 Flight Test - Optical Navigation Software - Backup Flight Software