Transcription
38th International Symposium on Automation and Robotics in Construction (ISARC 2021)Towards a Construction Site Control System – TaskManagement in Construction Operations and IntralogisticsM. Schöberla, D. Bartmanna, S. Kesslera and J. FottneraaChair of Materials Handling, Material Flow, Logistics, Technical University of Munich, GermanyE-mail: max.schoeberl@tum.deAbstract –The operation of automated constructionequipment and autonomous construction robotsdepends on contextual information regarding the jobto be carried out. Therefore, robots as well asequipment require a task-based construction sitecontrol system. Such a system also provides someadvantages for construction managers. However,some prerequisites must be met prior toimplementation.Thispaperpositionstheconstruction site control system concept in thecurrent and future task management on constructionsites and compares approaches from autonomousintralogistics with those of the construction sector.The paper then examines the required functionalityof a construction site control system in detail andcloses with the demonstration of an exemplaryconstruction site control system (CS²).Keywords –Construction Site; Control System;Management; Construction Robotics1TaskIntroductionStandardized processes and the application ofautonomous construction equipment are innovative,high-performing and versatile approaches and representthe key elements in the digitalization of the constructionsite. Autonomously operating equipment implies theneed to efficiently assign explicit tasks to such equipment.However, task assignment on construction sites iscurrently hardly automated. In most cases the wholecommunication is verbal and informal. In order to meetthe growing demand for automated task assignment, theconcept of a control system can be adapted from otherindustries. A control system provides equipment withsignificant data and tasks before and during operations.The aim of such a system is to manage operationsefficiently, to detect disturbance variables at an earlystage and thus to realize a smooth, excellent constructionprocess. Additionally, a control system infrastructureenables the exchange of environmental information107between autonomous equipment, which simultaneouslyforms a uniform data basis for cooperative operations. Inaddition to the necessity for increasingly automatedequipment operation, there are a number of positiveeffects on the management of construction processes.Coordination efforts for reoccurring tasks andmisunderstandings when passing on tasks between sitemanager, foreman and vehicle driver are eliminated witha CS². Furthermore, job results are automatically reportedfrom the autonomous equipment to the CS², reliablydocumented, and made accessible to authorized users.Site managers and foremen can thus focus on managinginevitable, unforeseeable changes. In the future, themeta-data generated during the processing and reportingof tasks can be used for project control and enableprocess mining approaches on the construction site.2Research Method and StructureMotivated by the vision above, the overarchingresearch question of this paper is: How does anapplicable and sustainable control system concept for theautomated construction site look like?In order to approach this research question, expertinterviews with various construction stakeholders andequipment manufacturers have been carried out. Theyform the basis for the process analysis described belowand the assessment of applicability. Subsequently, aninterdisciplinary expert workshop on the understandingand functionality of a CS² was conducted as part of aresearch project. Additionally, literature on taskmanagement and control systems applied on constructionsites was systematically reviewed to classify existingsolutions. In order to sustainably address future fields ofaction in autonomous construction, other, moreautomated, sectors were also consulted. Withintralogistics, a suitable industry was found in whichautonomous transport systems are already integrated intothe warehousing process. The comparison of taskmanagement in both industries provides structure fordefining and conceptualizing a CS² and, moreover, anestablished template for implementation. Finally, parts ofthe template were implemented in a small case study, to
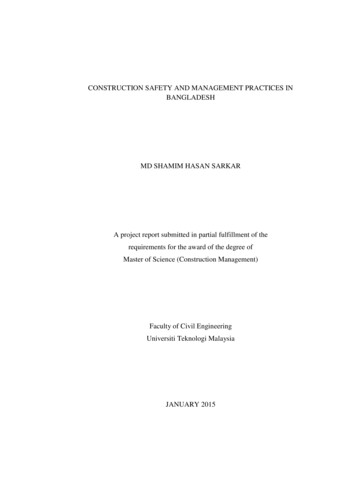
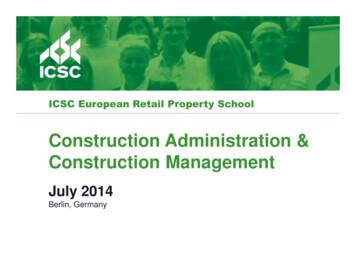
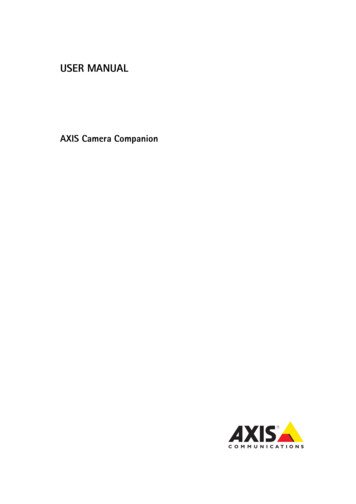
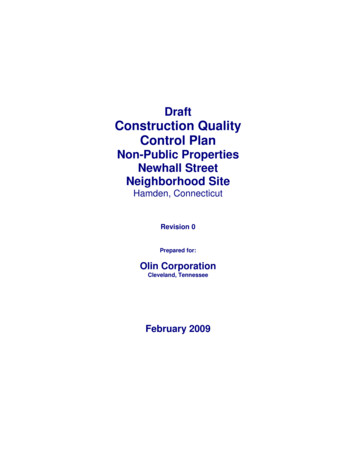
38th International Symposium on Automation and Robotics in Construction (ISARC 2021)demonstrate practicability.Project ManagementTechnicalSpecificationsState of the Art3.1FundamentalsIt is important to clarify the two fundamentalconcepts of task management and control systems beforegoing into more detail.First, task management is defined as the process ofmanaging tasks, specifically planning, testing, tracking,and reporting, in order to accomplish a collective orindividual goal [1]. Adherent to this definition, itcomposes an element of project and process management[2]. Second, a control system can be defined as a “systemthat can command, direct or regulate itself or anothersystem to achieve a certain goal” [3]. More specificallyin the ISA 95 [4] automation pyramid, industrial controlsystems are divided into 5 levels, from productionprocess (Lvl. 0) to business planning and logistics (Lvl.4). The scope of control systems regarded in this paperspans from level 2: Monitoring and Supervision to level3: Manufacturing Operations and Management. Typicalsystems for these levels are Supervisory Control and DataAcquisition (SCADA) for level 2 and ManufacturingExecution System (MES) for level 3.3.2Sate of PracticeBefore going deeper into the above definedtheoretical concepts, the current state of taskmanagement and control systems on construction sites isreviewed. Therefore, expert interviews with variousstakeholders of the construction industry have beencarried out.Task management on today’s construction site can bedivided into three levels: project management, workinstruction and execution. Today, the informationexchange between these levels is based on direct, verbaldialogs. At the project management level, the sitemanager translates the general project data (e.g.timetables, plans) into concrete instructions for actionand passes them on to the foreman (see Fig. 2).108ExecutionPlanSiteManagerWork Instruction1-2 WeeksPlanForemanOperatorExecutionFigure 2. Taskconstruction sitesmanagementontoday’sThe foreman, in turn, uses this data to create a oneto two-week plan and passes on the practical instructionsverbally to the equipment operators. The equipmentoperators as well as the foreman keep monitoring theprogress on the task and verbally report any deviations ortask completion to the site manager. As this taskmanagement process is mainly verbal and unstructured,it depends heavily on the involved persons. Digital toolsare hardly used in this context. Technical challenges arethe standardized description of tasks, transparent, openinterfaces and ongoing digitalization as well asautomation. Introduction and training of the necessaryprocessual and technological changes is the main nontechnical challenge in this context. However, machinecontrol vendors today offer systems to automaticallytransfer digital terrain models (DTM) to automated earthmoving machines [5]. These can be interpreted as earlyforms of control systems. More automated scenarios arestill a field of research.3.3State of ResearchIn order to get an overview of current research on taskmanagement and control systems in construction, asystematic literature review has been conducted. Theresults have been classified according to theircontributions to the topic. The search strategy for thesystematic literature review is shown in Figure 3.ANDSynonymsThis section covers the state of the art regarding theresearch matter and is divided in four parts. First, somefundamental concepts are defined in this section tofamiliarize with the topic and create a universalunderstanding. Second, the current task managementprocess and state of control systems on construction sitesbased on expert interviews is depicted. Subsequently, asystematic literature review depicts the current state ofresearch regarding task management and control systemsin construction. Finally, the fourth section covers anexcursus to the advanced control systems of autonomousintralogistics.OR3Time ScheduleActivityTask ManagementOperations ManagementTask MonitoringTask SupervisionTask ReportingTask PlanningAspectsObjectControl SystemGuidance SystemOperating SystemExecution SystemFleet Management SystemEnvironmentConstruction SiteFigure 3: Search strategy for the literature reviewThe keywords were searched for in the Scopusdatabase with aspects being combined through theBoolean “AND” operator and synonyms beingdifferentiated by the “OR” operator. A number of 94literature sources was initially obtained. For filtering out
38th International Symposium on Automation and Robotics in Construction (ISARC 2021)relevant sources, first the titles (43 sources) and then theabstracts (22 sources) have been examined regardingtheir topical relevance. The identified literature eithermotivates the design and implementation of a CS² (3.3.1),sets requirements on such a system (3.3.2) or presents aprototype control system (3.3.3).and post-mortem learning, leading to continuousimprovement in construction project performance.Above mentioned, multiple needs for a CS² motivatethe conceptualization of such a system in this paper. Thenext section gives an overview of requirements towardsthe system under development.3.3.13.3.2CS² MotivationThe need for a CS² is subject of two main groups ofpublications: construction planning and constructionrobotics literature.In construction planning, better project operatingsystems are expected to increase productivity bycontrolling equipment, machinery, and processes incomplex situations automatically [6]. Therefore,researchers work on integrating established task planningtechniques like Building Information Modeling (BIM)and the lean construction Last Planner System (LPS).They find that “software support is not treated thoroughly”[7]. In this context Cai et al. [8] identify state oftechnology gaps between academic research andproducts, products and on-site application as well as theconstruction and robotics industry. In order to foster theon-site take-up of construction automation and robotics,they propose the joint development of robots andautomated construction systems [8]. A CS² is a viableinstance in this context.The same need for integrating process automationefforts and robot development can be observed inconstruction robotics literature. Meschini et al. [9] stressthe need to integrate construction planning and robot taskplanning platforms in order to derive robot tasks fromconstruction information systems. Other sources, likeSeo et al. [10], Ha et al. [11] and Kim et al. [12], developsingle-task construction robots and thereby identify alack of task planning systems, capable of equipping theconstruction robot with the necessary job information tocope with the task at hand. While, integrating thedevelopment of a task management system in thedevelopment of a single-task construction robot is stateof-the-art, Melenbrink et al. [13] envision a future systemthat is capable of coordinating among heterogenousmachines performing many different tasks. They find thatcoordinating operations between different robot systemshas been largely neglected in research. Gharbia et al. [14]support this claim by stating that only a few paperspropose an integrated robotized construction site, whilemost of the papers studied single construction tasks.Research into the design for automation is essential tocreate integrated systems of on-site robotics, capable oftransferring the digital design data directly to operations[14]. Ha et al. [11] states similar aspects to achievecooperative operations of unmanned platforms inearthmoving. Vahdatikhaki et al. [15] stress that suchsystems could help achieve potentials in collaborative109Requirements on a CS²Literature lists manifold requirements towards a CS².The main requirements are enlisted below with a shortdescription from literature.1.Generate standardized tasks automaticallyA CS² should be capable of deriving standardizedtasks automatically from planning data. Bock and Linner[16] emphasize that even today the construction task hasto be split up in a multitude of subtasks that arecomplicated to coordinate. Dallasega et al. [16] also find,that a main shortcoming of current construction planningconcerns, the lack of detailed modelling of the executionprocess in terms of workflow, dependencies or locations.Schimanski et al. [7] therefore propose the Should-canwill-did (SCWD) scheduling logic consisting of fivesteps with increasing level of detail. Complementary,Sacks et al. [18] see the generation of construction tasksas one functionality of BIM.2.Integrate machines and robotsHa et al. [11] require a CS² to allocate subtasks amongseveral (automated) platforms, perform a shared task inassociation with other platforms, manage and prioritizeevents, to cooperatively handle more sophisticated taskswith higher efficiency. Melenbrink et al. [13], Gharbia etal. [14], Seo et al. [10] and Kim et al. [12] need a CS² tobe capable of equipping construction robots with thenecessary job information, as a basis for robot operations(e.g. trajectory planning, navigation, etc.) and handle therobot’s sensor data backflow into overarching projectmanagement and documentation systems. In this context,Part four of the ISO 15143 facilitates the exchange of sitetopology data between earthmoving machine controlsystems and proposes the exchange of job description andprocess data between machines, vendor integrationsystems and a central site control system [19]. Thereby,a machine-readable representation of the surroundingworld, similar to building representations through BIMor point clouds in high-rise construction is provided[12,20].3.Facilitate on-site coordination and communicationAntwi-Afari et al. [21] see critical success factors forconstruction projects adaptable to the CS² in“coordination and planning of construction works” and“collaboration of simultaneous access of constructionwork”. Akpabio et al. [22] formulate several software
38th International Symposium on Automation and Robotics in Construction (ISARC 2021)requirements towards a construction managementsoftware, among them “allow for efficientcommunication” and “give a platform to effectivelycollaborate and team up to achieve stated goals”. Tezeland Aziz [23] state that a project production controlsystem should be directed towards mobile systems andenable work units to compare what is actually plannedand what is actually done. They propose virtual visualcontrol boards, similar to Kanban boards. According toDallasega et al. [17] a CS² should support a frequentmonitoring of the work on-site and base the schedulingof the execution process on it. Oskuie et al. [24] add themonitoring of construction processes, and real-timeevaluation of productivity, as BIM-related functions.4.Support overall project managementThe connection of the CS² to more general projectmanagement tools is subject to requirements by Akpabioet al. [22] and Dallasega et al. [17]. Sacks et al. [18] stressthe online communication of product and processinformation towards BIM. Furthermore, Antwi-Afari etal. [21] see improved construction project performanceand quality as well as integrating projectdocumentation/bid preparation as critical success factorsincorporated by a CS².5.Feature the supply chainTo support construction execution control, accordingto Dallasega et al. [17] a CS² should not only be focusedon construction work but it should also consider thesupply chain. In more detail, Akpabio et al. [22] demandthat materials on site should be effectively managed toreduce wastage and improve efficiency.6.Adapt to changesRouhana et al. [25] investigate the emergence of ‘newtasks’, which should be manageable through a CS², inconstruction planning. They divide the inevitable causesbehind the emergence of ‘new tasks’ into three categories:the realm of planning, ongoing construction, anduncertainties. Ghasemi Poor Sabet et al. [6] add“untracked planning/scheduling (poor project control)”as a potential root of poor productivity and list “updatingand adjustable planning for microplans in case ofoverlooked requirements and troubleshooting” as aproductivity fundamental.These six requirements along with the results of theexpert workshop on a CS² form the basis for theassessment of existing control system prototypes in thenext section and the concept development of the CS²described in section 4.3.3.3Control System PrototypesIn the existing literature, nine control systemprototypes were identified. In this section, they are110briefly introduced and assessed regarding therequirements enlisted in section 3.3.2. Akpabio et al. [22]present requirements on and the development of a webbased construction management software. It consists of atask, document, materials handling, budget and messagesmodule. Abdelmegid et al. [26] integrate simulationmodeling with the LPS. They utilize informationavailable in the LPS, especially the phase schedule, todefine activities and their relationships. An exemplaryactivity list for the renovation and expansion of a publicstadium is demonstrated. Future research can includeapplying the framework on the complete operations of aconstruction project in realtime. Corucci et al. [27]present a three-level control system for an autonomousdemolition robot. The system consists of a high-levelplanner identifying subtasks and robot base positions, amedium-level planner defining demolition style andcontact points, as well as a low-level planner computinga collision-free trajectory. On top of the control system,they propose a convenient representation of thesurrounding world, in order for the robot to be situationalaware. Thereby, they solve the trade-off between arepresentation rich enough for reasoning but simpleenough for real-time processing through down-samplingof 3D sparse point clouds and semantical identificationof objects. Sriprasert et al. [28] differ between threelevels of planning: project or product level, process oroperation level, and assignment level. They propose anew construction planning technique called “Multiconstraint planning”. The technique is supported by aninformation management system: Lean Enterprise Webbased Information System for Construction (LEWIS). Itderives process data from interfaces to project planningand scheduling software. Schimanski et al. [7] introducea conceptual model for BIM-LPS integration. Theoriginal LPS model is extended by the BIM part whichserves both as input and output visualization instrument.Additionally, a (digital) Kanban system is proposed, tooptimize flow and improve visual management. Theyalso stress the positive pull effect of the Kanban method,enabling higher productivity. Seo et al. [10] develop anintelligent excavation system along with an excavationtask planner. Therefore, they use an earthwork designmodel and project management information systems.Vasilyev et al. [29] integrate QR-code exchange datatechnologies into a construction control system based onBIM, providing availability of data, security and mutualcooperation on a construction site. Kim et al. [20]investigate the task planning process of an autonomousexcavator. They assume the availability of a digitalterrain model (DTM) and its compatibility with the taskplanning system. Kim et al. [12] present a robot taskplanning system that can generate behaviors of robotsbased on the project information from BIM and theconstruction schedule. They use an IFC-SDF converter to
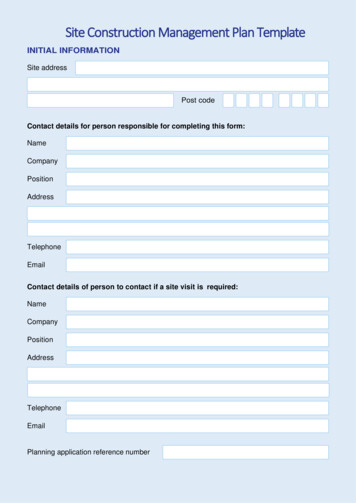
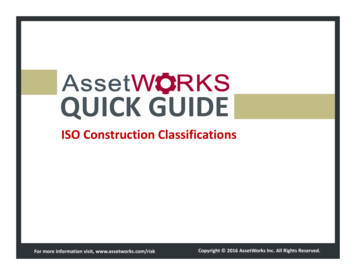
38th International Symposium on Automation and Robotics in Construction (ISARC 2021)link BIM and ROS for a wall-painting robot. The nextversion of their system should incorporate a diverse listof construction tasks and mobile robots that can besimulated in the created virtual environment.Vahdatikhaki et al. [15] combine location-basedguidance systems and safety management methods in amulti-agent system in order to improve equipmentoperations, safety and equipment management. Table 1assesses the introduced control system prototypesregarding the requirements from section 3.3.2.execution of the task, it is acknowledged by theAMR/AGV. In addition to task information necessary forits execution, the AMR/AGV sends and receivesinformation about the operational environment to ashared environment model available to each robot in thenetwork. Figure 4 summarizes the task managementenvironment in intralogistics.Warehouse ManagementWarehouseMgmt System(WMS)Table 1. Control system prototypes from literatureassessed against requirements on a imanskiSeoVasilyevKim 20Kim xxxControlSystemR6xxWork igure 4: Task management in intralogistics4xIn summary, current control system prototypes eitherfocus on supplying a robot or automated equipment withmachine-readable, standardized tasks or focus oncoordination and communication on a projectmanagement level. None of the existing prototypescombine task management on the equipment level withthe project management level.3.4StorekeeperState of Practice in IntralogisticsAs the assessment of the control system prototypes inTable 1 has shown, very few control systems from theconstruction sector fulfill the multiple requirements fromequipment automation and project management. In orderto prepare the CS² concept development in the nextsection, this subsection looks into the more advancedcontrol systems of the autonomous intralogistics sector.Intralogistics can be analogously to current taskmanagement on construction sites (see 3.2) divided intothree levels. One difference is that instead of the firstlevel being project management, warehouse managementpreceedes the work instruction and execution levels inintralogistics. The automated information exchangebetween these levels is based on digital interfacesstandardized in industry standards like the VDA 5050[30]. At the warehouse management level, a warehousemanager configures the warehouse management system,which in turn transfers data to a control system. Thecontrol system creates tasks from the data received andtransmits them to the autonomous mobile robots (AMR)or automated guided vehicle (AGV). After successful111Construction Site Control System (CS²)Picking up on the excurse to autonomousintralogistics, the formulated requirements and themotivation for a CS², this section proposes an applicableand sustainable control system concept for the automatedconstruction site of the future. Therefore, the CS² islocated in the task management environment of futureconstruction sites. Subsequently, the functional conceptof the CS² is examined in detail, before the subsectioncloses with an exemplary implementation of the CS².The following concepts are founded on the results ofan expert workshop on task management and controlsystems in the construction sector as part of aninterdisciplinary research project on the digitalization ofthe construction site as well as the findings of expertinterviews and the literature review presented in theprevious section.In the future, task management on the constructionsite can still be divided into the levels of projectmanagement, work instructions and execution.Nonetheless, the automated information exchangebetween the three levels is based on digital interfaces. Inaddition, there is a verbal information exchange betweenthe site manager and the foreman for task managementissues, like changes or emerging tasks, as well as theoverall project management. Tasks are generated fromthe job description of the object under construction. Morespecifically, the information sources will be informationrich building information models (e.g. 5D BIM) andproject management simulation systems (e.g. DiscreteEvent Simulation). The CS² is responsible for taskmanagement and the digital supply of the autonomousequipment with the information required for task
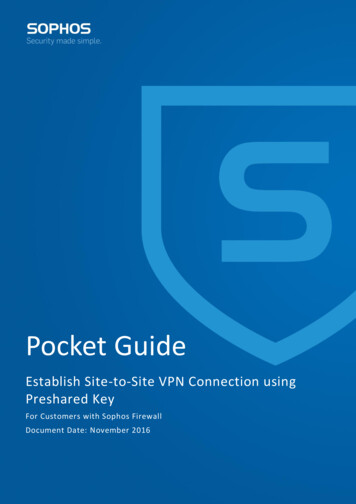
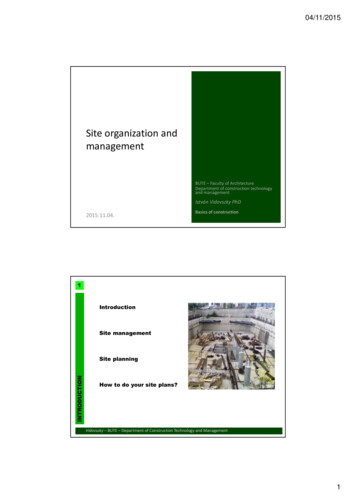
38th International Symposium on Automation and Robotics in Construction (ISARC 2021)execution. At the work instruction level, the foreman caninteract with the CS² to manage tasks, similar to a taskbacklog or Kanban board. Figure 5 shows the taskmanagement environment of future construction siteswith the CS².Project Management5D BIM SimulationConstructionSite ControlSystem (CS²)SiteManagerForemanWork InstructionAutonomousEquipmentExecutionFigure 5: Taskconstruction sites4.1managementonfutureCS² - Functional ConceptThe CS² connects the project management andexecution levels, as shown in Figure 5. The individualfunctions and their interactions are broken down inFigure 6.to the equipment (Transmit Environment Information).The sensor data of the autonomous equipment collectedduring task execution synchronizes a shared environmentmodel (Synchronize Environment Model). Aftersuccessful execution of the task, the work result isdocumented and transferred to the project managementlevel (Document Task Results).Through this functional structure, the CS² covers allrequirements from section 3.3.2 (see Table 2).Standardized tasks are automatically generated fromBIM and other sources of planning data (R1). These tasksare broken-down and transmitted to automatedequipment and robots (R2). Through a Kanban board likeinterface for task management, the on-site coordinationand communication is supported (R3). Results of theexecuted tasks are fed back into overarching projectmanagement solutions, like BIM (R4). With thisinterface to BIM and other planning data, the supplychain can be incorporated in task generation or workresults can be considered in supply chain controlling (R5).As the foreman is a crucial part of the CS² the wholesystem can react to changes by managing or creatingtasks, fostering on-site flexibility (R6).Table 2. CS² assessed against the requirements fromsection 3.3.2PrototypeCS²Project Management5D BIM SimulationDocumentTask ResultsGenerate TaskAssign TaskUserManagementManage TasksShared itEnvironmentInformationTransmit TaskAutonomousEquipmentExecutionFigure 6: Functional concept of the CS²First, a task is generated from the project data storedin building information models and project managementsimulation systems. The construction task is segmentedinto subtasks suitable for the specific piece of equipment(Generate Task), whereby the task design and the addeddata differ depending on the equipment. In order tofacilitate a project management, an assignment to the jobdescription and an execution period should be specifiedwith each task. After the task has been created, it isassigned to a piece of equipment that is available in theexecution period (Manage Equipment) and that matchesthe task requirements (Assign Task). The foreman, as themain user of the CS², can manage and manually edit theorders (Manage Tasks) after authentication (AuthenticateUser). The task is then transmitted to the autonomousequipment, including all the necessary data (TransmitTask). Likewise, relevant environmental informationfrom a shared environmental model is sent with the task112R1xR2xR3xR4xR5xR6xExemplary ImplementationThe introduced functional concept of the CS² is partlyimplemented to validate the concept. Autonomousmachine integration and a shared environmental modelare not implemented in this case study. In this specificcase study, which can only be briefly addressed here, thefocus is on earthwork (e.g. digging, grading, compaction)and transport tasks (e.g. bulk material, unit loads).The exemplary system can create tasks either throughimporting a standardized job description (GermanGAEB-xml-format) or manually through the taskcreation function. Attributes for specific tasks (e.g.digging or transporting) are predefined and can beautomatically or manually filled with the respectiveinformation. After a task is created, the task is allocatedto an equipment. Therefore, the machine database“Equipment Information System” (EIS) and a fleetmanagement platform are connected to the web-servicethrough APIs. In these systems, equipment can beadministrated and managed. Figure 9 shows the systemarchitecture, which is based on the client-server pattern,with the web browser taking on the role of the client. Theclient sends a request to the server, which then respondsand transmits the desired information. At the core of thearchitecture is the server with the associated database. In
38th International Symposium on Automation and Robotics in Construction (ISARC 2021)addition, two services (equipment information and fleetmanagement) are currently integrated, however furtherservices can be seamlessly integrated if necessary.During operations, the foreman can move the taskthrough the states (backlog, in progress, on hold, inreview, done) on the Kanban board (Fig. 9) or, in a moreautomated scenario, the robot automatically feeds backhis current state of work. The foreman can alwaysintervene and stop, review, comment or reopen tasks,staying in full control of construction.investigate the development of multi-functional robotsthat can be configured for several tasks in a generalconstruction workflow (e.g. inner-city construction).AcknowledgementsThe authors would like to thank the German FederalMinistry of Education and Research for funding thisresearch project (grant number 02P17D230).References[1][2][3][4][5]Figure 9: CS² system architecture and Kanbanboard with task states5[6]Conclusion & OutlookA CS² is necessary for autonomous equipment andbrings numerous advantages in construction robotics aswell as construction planning and management. However,some functional requirements must be met for asuccessful implementation. This paper classi
and post-mortem learning, leading to continuous improvement in construction project performance. Above mentioned, multiple needs for a CS² motivate the conceptualization of such a system in this paper. The next section gives an overview of requirements towards the system under development. 3.3.2 Requirements on a CS²