Transcription
STATICSFE ReviewStatics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
1. Resultants of force systemsStatics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
VECTOR OPERATIONS (Section 2.2)Scalar Multiplicationand DivisionStatics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
VECTOR ADDITION USING EITHER THEPARALLELOGRAM LAW OR TRIANGLEParallelogram Law:Triangle method(always ‘tip to tail’):How do you subtract a vector?How can you add more than two concurrent vectors graphically?Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
RESOLUTION OF A VECTOR“Resolution” of a vector is breaking up a vector into components.It is kind of like using the parallelogram law in reverse.Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
ADDITION OF A SYSTEM OF COPLANAR FORCES(Section 2.4) We ‘resolve’ vectors intocomponents using the x and y-axiscoordinate system. Each component of the vector isshown as a magnitude and adirection. The directions are based on the x and y axes. We use the“unit vectors” i and j to designate the x and y-axes.Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
For example,F Fx i Fy jorF' F'x i ( F'y ) jThe x and y-axis are always perpendicular to each other.Together, they can be “set” at any inclination.Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
ADDITION OF SEVERAL VECTORS Step 1 is to resolve each forceinto its components. Step 2 is to add all the xcomponents together, followed byadding all the y-componentstogether. These two totals are thex and y-components of theresultant vector. Step 3 is to find the magnitudeand angle of the resultantvector.Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
An example of the process:Break the three vectors into components, then add them.FR F1 F2 F3 F1x i F1y j F2x i F2y j F3x i F3y j (F1x F2x F3x) i (F1y F2y F3y) j (FRx) i (FRy) jStatics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
You can also represent a 2-D vector witha magnitude and angle. tan 1Statics, Fourteenth EditionR.C. HibbelerFRyFRxFR F F2Rx2RyCopyright 2016 by Pearson Education, Inc.All rights reserved.
EXAMPLE IGiven: Three concurrent forcesacting on a tent post.Find: The magnitude andangle of the resultantforce.Plan:a) Resolve the forces into their x-y components.b) Add the respective components to get the resultant vector.c) Find magnitude and angle from the resultant components.Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
EQUILIBRIUM OF A PARTICLE, THE FREE-BODYDIAGRAMStatics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
APPLICATIONSFor a spool of givenweight, how would youfind the forces in cablesAB and AC? If designinga spreader bar like the onebeing used here, you needto know the forces to makesure the rigging doesn’tfail.Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
APPLICATIONS (continued)Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
SIMPLE SPRINGSStatics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
CABLES AND PULLEYST1T2Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
GROUP PROBLEM SOLVINGGiven: The mass of lamp is 20 kgand geometry is as shown.Find:The force in each cable.Plan:Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
EQUIVALENT FORCE SYSTEMSStatics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
APPLICATIONS (continued) ?Statics, Fourteenth EditionR.C. HibbelerSeveral forces and a couple momentare acting on this vertical section ofan I-beam.Copyright 2016 by Pearson Education, Inc.All rights reserved.
SIMPLIFICATION OF FORCE AND COUPLESYSTEM (Section 4.7)Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
MOVING A FORCE ON ITS LINE OF ACTIONStatics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
MOVING A FORCE OFF OF ITS LINE OF ACTIONBStatics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
SIMPLIFICATION OF A FORCE AND COUPLESYSTEMStatics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
SIMPLIFICATION OF A FORCE AND COUPLESYSTEM (continued)WR W1 W2(MR)o W1 d1 W2 d2Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
GROUP PROBLEM SOLVING IGiven: A 2-D force and couplesystem as shown.Find: The equivalent resultantforce and couplemoment acting at A.Plan:Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
RIGID BODY: EQUATIONS OF EQUILIBRIUMStatics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
APPLICATIONSAStatics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
APPLICATIONS (continued)Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
EQUATIONS OF EQUILIBRIUM (Section 5.3) Fx 0 Fy 0 Mo 0where point O is any arbitrary point.Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
TWO-FORCE MEMBERS & THREE FORCEMEMBERS (Section 5.4)Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
EXAMPLES OF TWO-FORCE MEMBERSStatics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
EXAMPLEGiven: The 4kN load at B ofthe beam is supportedby pins at A and C.Find: The support reactionsat A and C.Plan:Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
SIMPLE TRUSSES, THE METHOD OF JOINTS,& ZERO-FORCE MEMBERSStatics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
THE METHOD OF JOINTS (Section 6.2)A free-body diagram of Joint BStatics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
ZERO-FORCE MEMBERS (Section 6.3)If a joint has only two non-collinearmembers and there is no externalload or support reaction at that joint,then those two members are zeroforce members.Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
ZERO – FORCE MEMBERS (continued)If three members form a truss joint forwhich two of the members are collinearand there is no external load or reaction atthat joint, then the third non-collinearmember is a zero force member, e.g., DA.Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
EXAMPLEGiven: Loads as shown on the trussFind: The forces in each memberof the truss.Plan:Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
THE METHOD OF SECTIONSStatics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
APPLICATIONSStatics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
STEPS FOR ANALYSISStatics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
EXAMPLEGiven: Loads as shown on thetruss.Find: The force in membersKJ, KD, and CD.Plan:Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
FRAMES AND MACHINESStatics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
APPLICATIONS“Machines,” like those above, are used in a variety ofapplications. How are they different from trusses and frames?Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
FRAMES AND MACHINES: DEFINITIONSFrameMachineFrames are generally stationary and support external loads.Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
STEPS FOR ANALYZING A FRAME OR MACHINEFABStatics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
EXAMPLEGiven: The frame supports anexternal load and momentas shown.Find: The horizontal and verticalcomponents of the pinreactions at C and themagnitude of reaction at B.Plan:Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
CHARACTERISTICS OF DRY FRICTIONStatics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
APPLICATIONSIn designing a brake system for abicycle, car, or any other vehicle, it isimportant to understand the frictionalforces involved.Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
APPLICATIONS (continued)The rope is used to tow therefrigerator.In order to move the refrigerator, isit best to pull up as shown, pullhorizontally, or pull downwards onthe rope?Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
CHARACTERISTICS OF DRY FRICTION (Section 8.1)Friction is defined as a force of resistanceacting on a body which prevents or resists theslipping of a body relative to a second body.Experiments show that frictional forces acttangent (parallel) to the contacting surface ina direction opposing the relative motion ortendency for motion.For the body shown in the figure to be inequilibrium, the following must be true:F P, N W, and W*x P*h.Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
CHARACTERISTICS OF DRY FRICTION (continued)Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
CHARACTERISTICS OF DRY FRICTION (continued)Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
IMPENDING TIPPING versus SLIPPINGFor a given W and h of the box,how can we determine if the blockwill slide or tip first? In this case,we have four unknowns (F, N, x,and P) and only the three E-of-E.Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
IMPENDING TIPPING versus SLIPPING (continued)Assume: Slipping occursKnown: F s NSolve:x, P, and NCheck: 0 x b/2OrAssume: Tipping occursKnown: x b/2Solve:Check:Statics, Fourteenth EditionR.C. HibbelerP, N, and FF s NCopyright 2016 by Pearson Education, Inc.All rights reserved.
EXAMPLEGiven: Crate weight 250 lb and s 0.4Find: The maximum force P thatcan be applied withoutcausing movement of the?crate.Plan:Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
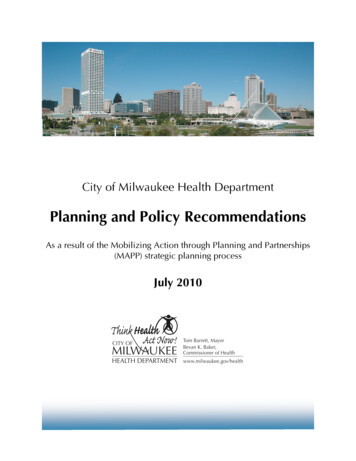
EXAMPLE (continued)Solution:1.5 ft1.5 ftP250 lb4.5 ft3.5 ft0FxNFBD of the crateThere are four unknowns: P, N, F and x.First, let’s assume the crate slips. Then the frictionequation is F s N 0.4 N.Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
EXAMPLE (continued)1.5 ftP1.5 ft250 lb4.5 ft3.5 ft FX P – 0.4 N 0 FY N – 250 0Solving these two equations gives:P 100 lb andN 250 lb0FxNFBD of the crate MO -100 (4.5) 250 (x) 0Check: x 1.8 1.5 : No slipping will occur since x 1.5Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
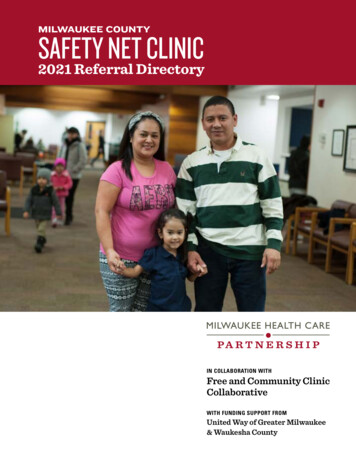
EXAMPLE (continued)Since tipping occurs, here is the correct FBD:1.5 ft FX P – F 0 FY N – 250 0These two equations give:P F and N 250 lbP1.5 ft250 lb4.5 ft3.5 ftAFNFBD of the crate MA – P (4.5) 250 (1.5) 0P 83.3 lb, and F 83.3 lb s N 100 lbStatics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
CENTER OF GRAVITY, CENTER OF MASS ANDCENTROID OF A BODYStatics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
APPLICATIONSStatics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
APPLICATIONS (continued)One concern about a sport utility vehicle (SUV) is that it might tipover when taking a sharp turn.Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
APPLICATIONS (continued)Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
CONCEPT OF CENTER OF GRAVITY (CG)Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
CM & CENTROID OF A BODYStatics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
CONCEPT OF CENTROIDStatics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
EXAMPLE IGiven: The area as shown.Find: The centroid location (x , y)Plan: Follow the steps.Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
CG/CM OF A COMPOSITE BODYStatics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
CONCEPT OF A COMPOSITE BODYStatics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
GROUP PROBLEM SOLVINGGiven: The part shown.badStatics, Fourteenth EditionR.C. HibbelercFind:The centroid ofthe part.Plan:Follow the stepsfor analysis.Copyright 2016 by Pearson Education, Inc.All rights reserved.
DEFINITION OF MOMENTS OF INERTIA FORAREAS, RADIUS OF GYRATION OF AN AREAStatics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
APPLICATIONSMany structural members like beams and columns have crosssectional shapes like an I, H, C, etc.Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
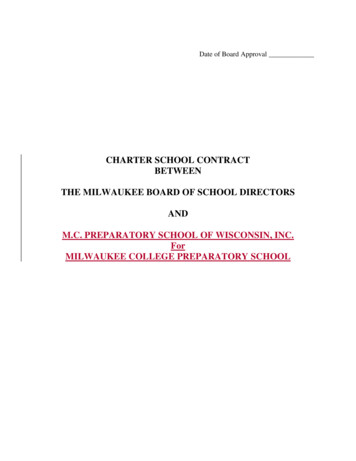
DEFINITION OF MOMENTS OF INERTIA FOR AREAS10cm3cm10cm1cmP3cm10cmx(A)(B)(C)R1cmStatics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.S
DEFINITION OF MOMENTS OF INERTIA FOR AREASFor the differential area dA, shown in thefigure:d Ix y2 dA ,d Iy x2 dA , and,d JO r2 dA , where JO is thepolar moment of inertia about the pole O or zaxis.Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
MoI FOR AN AREA BY INTEGRATIONFor simplicity, the area element used hasa differential size in only one direction(dx or dy). This results in a singleintegration and is usually simpler thandoing a double integration with twodifferentials, i.e., dx·dy.Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
EXAMPLEGiven: The shaded area shown in thefigure. (x,y)Find: The MoI of the area about thex- and y-axes.Plan: Follow the steps given earlier.Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
PARALLEL-AXIS THEOREM, RADIUS OF GYRATION &MOMENT OF INERTIA FOR COMPOSITE AREASStatics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
APPLICATIONSStatics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
APPLICATIONS (continued)Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
PARALLEL-AXIS THEOREM FOR AN AREA(Section 10.2)This theorem relates the moment of inertia (MoI) of anarea about an axis passing through the area’s centroid tothe MoI of the area about a corresponding parallel axis.This theorem has many practical applications, especiallywhen working with composite areas.Consider an area with centroid C. The x' and y' axes pass through C. The MoI about the x-axis,which is parallel to, and distance dy from the x ' axis, is found by using the parallel-axis theorem.Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
PARALLEL-AXIS THEOREM (continued)Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
EXAMPLEGiven: The beam’s crosssectional area.Find:The moment of inertia ofthe area about the x-axisPlan:Follow the steps foranalysis.[3] [2] [1]Statics, Fourteenth EditionR.C. HibbelerCopyright 2016 by Pearson Education, Inc.All rights reserved.
Title: Section 2.1,2.2,2.4 Author: Dr.Sudhir Mehta & Dr.Scott Danielson, Dr. Changho Nam, & Trian Georgeou Subject: Hibbeler Statics 14th Edition