Transcription
Vol. 00, No. 00, October 2008, 1–29RESEARCH ARTICLESolving Constrained Optimization Problems with a HybridParticle Swarm Optimization AlgorithmLeticia Cecilia Cagnina, Susana Cecilia Esquivel1and Carlos A. Coello Coello2 1LIDIC (Research Group). Universidad Nacional de San LuisEj. de Los Andes 950. (D5700HHW) San Luis, ARGENTINA2CINVESTAV-IPN (Evolutionary Computation Group)Departamento de Computación, Av. IPN No. 2508Col. San Pedro Zacatenco, México D.F. 07360, MEXICOEmail: {lcagnina,esquivel}@unsl.edu.ar and ccoello@cs.cinvestav.mx(v3.7 released September 2008)This paper presents a particle swarm optimization algorithm for solving generalconstrained optimization problems. The proposed approach introduces different methods to update the particle’s information, as well as the use of a doublepopulation and a special shake mechanism designed to avoid premature convergence. It also incorporates a simple constraint-handling technique. Twentyfour constrained optimization problems commonly adopted in the evolutionaryoptimization literature, as well as some structural optimization problems areadopted to validate the proposed approach. The results obtained by the proposed approach are compared with respect to those generated by algorithmsrepresentative of the state of the art in the area.Keywords: particle swarm optimization; constraint-handling; evolutionaryalgorithms; engineering optimization CorrespondingauthorISSN: 0305-215X print/ISSN 1029-0273 onlinec 2008 Taylor & FrancisDOI: om
1.IntroductionIn recent years, a wide variety of real-world applications have been solved using metaheuristics, mainly because they tend to produce reasonably good solutions at a reasonablecomputational cost. One of the metaheuristics that has become very popular in the lastfew years is Particle Swarm Optimization (PSO) (Kennedy and Eberhart 2001).PSO was conceived as a simulation of individual and social behavior (Kennedy andEberhart 1999) such as the one observed in flocks of birds and fishes. PSO explores thesearch space using a population of individuals (named swarm), and the best performers(either within a group or with respect to the entire population) affect the performanceof the others.In PSO, each individual is named particle and represents a possible solution to theproblem at hand, within a multidimensional search space. The particles have their ownposition and velocity and such values are updated at each iteration of the algorithm. Theindividuals also record their past behavior and use it to move towards promising regionsof the search space.PSO has been found to be highly competitive for solving a wide variety of optimizationproblems (Bochenek and Forys 2006, Muñoz-Zavala et al. 2006, Liang and Suganthan2006, He and Wang 2007, Ye et al. 2007, Perez and Behdinan 2007b, Mezura-Montes andLópez-Ramı́rez 2007). In spite of the popularity of PSO as an efficient optimizer, it hasbeen until relatively recently that its use has focused more on engineering optimizationproblems, mainly because of the lack of constraint-handling techniques that had beenexplicitly designed to be coupled with a PSO1 algorithm. Although the use of constrainthandling mechanisms commonly adopted with other evolutionary algorithms is, of course,possible in PSO (e.g., exterior penalty functions), the resulting approaches are normally not very competitive with respect to state-of-the-art evolutionary optimizationalgorithms, which motivates the development of carefully designed constraint-handlingmechanisms that explicitly exploit the features of PSO when exploring the search space.In this paper, it is precisely introduced a proposal of this sort, which can be useful tosolve nonlinear constrained optimization problems. The approach is validated first witha test suite commonly adopted in the literature of constrained evolutionary optimization(i.e., evolutionary algorithms that have a constraint-handling mechanism), in order toassess the competitiveness of the present approach with respect to state-of-the-art evolutionary algorithms designed for solving constrained optimization problems. Then, inthe final part of the paper, some engineering optimization problems are presented andthe results are compared with respect to approaches that have been used to solve themin the specialized literature.The remainder of the paper is organized as follows. Section 2 describes the generalnonlinear optimization problem of interest. A review of the most representative previousrelated work is presented in Section 3. Section 4 describes the proposed PSO for solvingconstrained optimization problems. The experimental setup and the comparison of results with respect to state-of-the-art approaches are presented in Section 5. Finally, theconclusions and some possible paths for future work are presented in Section 6.1PSO, like any other evolutionary algorithm (e.g., genetic algorithms) can be seen as an unconstrained search/optimization technique, since in its original form, it does not have an explicitconstraint-handling mechanism.
2.Statement of the ProblemThe focus of this paper is the solution of the general nonlinear optimization problemin which the objective is:Find x which optimizes f ( x)(1)gi ( x) 0, i 1, . . . , n(2)hj ( x) 0, j 1, . . . , p(3)subject to:where x is the vector of solutions x [x1 , x2 , . . . , xr ]T , n is the number of inequalityconstraints and p is the number of equality constraints (in both cases, constraints couldbe linear or nonlinear).If F denotes the feasible region and S denotes the whole search space, then it shouldbe clear that F S.For an inequality constraint that satisfies gi ( x) 0, then it is said to be active at x.All equality constraints hj (regardless of the value of x used) are considered active at allpoints of F.It is relatively common to transform equality constraints into inequalities of the form: hj ( x) ǫ 0(4)where ǫ is the tolerance allowed (a very small value). This is precisely the approachadopted in this paper. More details about the definition of ǫ are provided in Section 4.2.4.3.Previous Related WorkAs indicated before, evolutionary algorithms can be seen as unconstrained search techniques, since in their original form, they do not incorporate any explicit mechanism tohandle constraints. Because of this, several authors have proposed a variety of constrainthandling techniques explicitly designed for evolutionary algorithms (Coello Coello 2002,Mezura-Montes 2009).However, there exist relatively few proposals involving the design of constraint-handlingtechniques explicitly developed for the PSO algorithm. Next, a short review of the mostrepresentative work done in this regard is shown.Hu and his co-workers (2002, 2003) proposed mechanisms that ensure the generationof feasible solutions. Such mechanisms can be, however, very expensive (computationallyspeaking) and even impossible to use in problems having a very small feasible region.The test cases adopted to validate this approach were a few engineering optimizationproblems in which the size of the feasible region is relatively large with respect to thetotal size of the search space.
Paquet and Engelbrecht (2003) proposed an approach explicitly designed to deal withlinear constraints, but without considering a more general extension that incorporatesnonlinear constraints.Zhang et al. (2004) proposed the use of a periodic constraint-handling mode in aPSO algorithm. The main idea is to make periodic copies of the search space when thealgorithm starts the run. This aims to avoid the dispersion of particles that arises fromthe application of the mutation operator to particles lying on the boundary betweenthe feasible and infeasible regions. This approach was validated adopting a low numberof objective function evaluations (ranging from 28,000 to 140,000), and using eight testproblems. The results produced by the proposed approach were compared with respectto those generated by traditional constraint-handling techniques (i.e., penalty functions),but none is provided with respect to state-of-the-art evolutionary algorithms designedfor constrained search spaces.In Toscano Pulido and Coello Coello (2004) a simple constraint-handling mechanismbased on closeness of the particles in the swarm to the feasible region is incorporatedinto a PSO algorithm. This approach also incorporates a mutation operator (called turbulence), which changes the flight of the particles to different zones, aiming to maintaindiversity. In the validation of this approach, the authors adopted a relatively large population size, and a low number of iterations, as to perform 340,000 objective functionevaluations. The results of this approach were found to be competitive with respect tothose generated by state-of-the-art evolutionary algorithms designed for constrained optimization (namely, stochastic ranking (Runarsson and Yao 2000), homomorphous maps(Koziel and Michalewicz 1999) and ASCHEA (Hamida and Schoenauer 2002)) whensolving the thirteen test problems adopted in (Runarsson and Yao 2000).Parsopoulos et al. (2005) proposed a Unified Particle Swarm Optimization approach,which was then adapted to incorporate constraints. This approach adopts a penalty function, which uses information from the number of constraints violated and the magnitudeof such violations. Also, the feasibility of the best solutions is preserved. This approachwas tested with four constrained engineering optimization problems with promising results. However, no results were presented with benchmark problems, which are normallymore difficult to solve.Lu et al. (2006) proposed DOM, a dynamic objective technique to handle constraints,based on the search mechanism of the PSO algorithm. DOM states bi-objective unconstrained optimization problems: one objective is related to reaching the feasible region,and the other is related to reaching the global optimum. The technique allows each particle to dynamically adjust the importance given to each of these two objectives, basedon their current position. The authors also presented a restricted velocity PSO (RVPSO)which incorporates information about the feasible region that had been previously learnt.Both approaches were validated using the 13 well-known benchmark functions adoptedin (Runarsson and Yao 2000). DOM was compared with an approach called “keepingfeasible solutions”, which was reported in (Hu and Eberhart 2002) and the former outperformed the latter. Then, they incorporated DOM into RVPSO and also into a CPSOalgorithm (i.e., a PSO algorithm using the constriction factor (Eberhart and Shi 2000)),and the results showed that DOM RVPSO outperformed or exhibited the same performance as DOM CPSO. The results were also compared with respect to PESO (aPSO approach that incorporates some evolutionary operators that improve its performance) (Muñoz-Zavala et al. 2005) and they concluded that their proposed approach washighly competitive when considering the quality of the solutions produced. Additionally,the authors indicated that another advantage was that their proposed approach required
only 50,000 objective function evaluations, whereas PESO required 350,000 evaluations.A follow-up of this work was presented in (Lu and Chen 2008), in which the authorsproposed an approach called “self-adaptive velocity PSO” (SAVPSO), which is basedon DOM. This version uses a different velocity update equation to maintain the particles into the feasible region, and the previous experience incorporated into the velocityis restricted to the flying direction. This version was assessed using the same set of 13test problems indicated before. Results were compared with respect to those reportedby Toscano Pulido and Coello Coello (2004), PESO (Muñoz-Zavala et al. 2005), Hu andEberhart (2002) and DEPSO (a PSO with a reproduction operator similar to the oneadopted by differential evolution) (Zhang and Xie 2003).Liang and Suganthan (2006) modified a previous dynamic multi-swarm particle swarmoptimizer (DMS-PSO) to solve 24 benchmark functions. Their version includes a newmethod to handle constraints based on sub-swarms which are assigned depending onthe difficulty of each constraint. The algorithm, named DMS-C-PSO (for DMS-PSO Constraint mechanism), has dynamic multi-swarms and a Sequential Quadratic Programming method (used as a local search engine) aimed to improve the DMS-C-PSO’sability to find good solutions. The authors tested their approach with 24 constrainedtest problems. They concluded that their proposed approach was able to find feasiblesolutions in all the test problems and that was able to reach the optimum in most ofthem.Zahara and Hu (2008) proposed a hybridization of PSO with the Nelder-Mead method(Nelder and Mead 1965), called NM-PSO. The aim was to combine the global searchproperties of PSO with the efficient local search performed by the Nelder-Mead method.This approach adopts two constraint-handling methods: a gradient repair technique anda constraint fitness priority-based ranking method. Both of them avoid the difficultiesassociated with the choice of an appropriate penalty term within a penalty function,by using gradient information derived from the set of constraints of the problem. This,however, eliminates the main advantage of using a derivative-free search method (NelderMead), since such gradient information will be required and its estimation requires severaladditional objective function evaluations, unless the exact derivatives are available. NMPSO was applied to the 13 benchmark problems included in (Runarsson and Yao 2000).The approach performed 5,000 iterations in all cases, but the number of objective functionevaluations performed at each iteration depends on the dimensionality of the problem(the population size was set to 21 N 1, where N is the number of decision variablesof the problem). In some cases, the number of objective function evaluations requiredby this approach was close to one million, which is a very high value when compared tothe number of evaluations typically required by modern constraint-handling techniques(normally no higher than 500,000). Results were compared with respect to a cultureddifferential evolution approach (Landa Becerra and Coello Coello 2006), filter simulatedannealing (Hedar and Fukushima 2006), a genetic algorithm (Chootinan and Chen 2006)and an improved version of stochastic ranking (Runarsson and Yao 2005). In terms ofthe quality of the results achieved, NM-PSO was able to find the best known solutionsin 10 problems, while the others could only find the best solutions in eight of them. Interms of computational cost, NM-PSO required less objective function evaluations ineight problems.Mezura-Montes and Flores-Mendoza (2009) evaluated with 24 constrained functionssome PSO variants with the purpose of selecting the most competitive local best PSOwith a constriction factor. Then, the authors modified that PSO variant by adding toit two features in order to obtain the so-called Improved Particle Swarm Optimization
(IPSO) algorithm. One modification was the incorporation of a dynamic adaptationmechanism to control two parameters: the acceleration constant that controls the influence of social information (c2 ) and the constriction factor (k). The second modificationwas in the dominance criterion used to compare solutions: the new solution is selectedonly if the sum of equality and inequality constraint violations is decreased. IPSO wastested with 24 benchmark problems and was compared with respect to state-of-the-artPSO approaches. The results obtained were competitive and even better in some cases,than those of the other algorithms with respect to which it was compared. The authorsconcluded that the proposed algorithm promoted a better exploration of the search spacewithout adding any extra complexity to a traditional PSO algorithm.The PSO-based approach reported in this paper maintains the simplicity of the originalPSO algorithm, since it does not require gradient information (as in (Zahara and Hu2008)), the use of external archives (as in (Muñoz-Zavala et al. 2005)) or specializedoperators to perform a biased exploration of the search space (as in (Lu and Chen 2008)).Nevertheless, as it will be shown later on, the proposed approach provides competitiveresults with respect to state-of-the-art approaches that have been proposed for solvingconstrained optimization problems.4.The Proposed ApproachThe approach is called “Constrained Particle Swarm Optimization with a shakemechanism” (CPSO-shake, for short). It inherits some characteristics from the classicalPSO model (Eberhart and Kennedy 1995) and from a previous CPSO (Cagnina et al.2006), but also incorporates features which aim to improve its performance, namely, abi-population and a shake mechanism.4.1.Classical PSO ModelThe PSO algorithm operates on a population of individuals (the so-called particles). Suchparticles consist of vectors of real numbers, and each vector position is named dimension.The algorithm iterates searching for solutions and saves the best position found so farfor the particles (for the “global best” or gbest model) or within the neighborhood (forthe “local best” or lbest model). The best value reached by each particle (pbest) is alsostored. The particles evolve using two update formulas, one for the particle’s velocityand another for its position, in the following way:vid X (vid c1 r1 (pid parid ) c2 r2 (M parid ))(5)parid parid vid(6)where vid is the velocity of the particle i at the dimension d, X is the constrictionfactor (Clerc and Kennedy 2002) whose goal is to balance global exploration and localexploitation of the swarm, c1 is the personal learning factor, and c2 the social learningfactor. r1 and r2 are two random numbers within the range [0, 1], which are used tointroduce a stochastic value to determine how much of each factor is added. pid is thedimension d of the best position reached by the particle i and M is either the best
position reached by any particle in the neighborhood (plid ) of the particle i or, the bestposition reached by any particle in the entire swarm (pgd ), depending of the model used(lbest or gbest). parid is the value of the particle i at the dimension d.4.2.The Previous CPSO ApproachNext, the modifications introduced in the PSO-based approach (Cagnina et al. 2006)with respect to the classical PSO model, are described.4.2.1. Updating Velocities and ParticlesA previous work (Cagnina et al. 2004) showed that it is possible to achieve quickly areasonably good performance with the gbest model in a variety of problems. However,it is well known that the gbest model tends to lose diversity relatively quickly and, as aconsequence of that, it tends to converge to local optima. The lbest model generally worksbetter than the gbest model as a consequence of its higher capability to maintain diversity.Motivated by this, the approach proposed here has a formula to update the velocity whichcombines both the gbest (fast convergence) and the lbest (less susceptibility to beingtrapped in local optima) models. The idea is to replace equation (5) by equation (7) inthe proposed CPSO.vid X (vid c1 r1 (pid parid ) c2 r2 (plid parid ) c3 r3 (pgd parid ))(7)where c3 is an additional social learning factor, r3 is a random number within therange [0, 1], plid is the dimension d of the best position reached by any particle in theneighborhood of particle i, and pgd is the dimension d of the best position reached byany particle in the swarm.The equation for updating the particles is also modified. Instead of using equation (6) inall the iterations, it is selected with a probability of 0.925. The rest of the time an equationbased on Kennedy’s proposal (Kennedy 2003) is used, which is depicted in equation (8).In this case, the position of each particle is randomly chosen from a Gaussian distributionwith the mean selected as the average between the best position recorded for the particleand the best in its neighborhood. The standard deviation is the difference between thesetwo values.pari N pi pl, pi pl 2(8)where pari is the particle to be updated, N is the Gaussian random generator, pi andpl are, respectively, the best position reached by the ith particle and, the best position reached by any particle in the neighborhood of pari . The probability of selectionadopted (0.925), deserves an explanation for being a seemingly unusual value. In orderto reach this probability value, a Latin Hypercube Design (LHD) study, as suggested inthe experimental design literature, was performed. LHD generates random points of theparameters to be set within a pre-defined range and fulfills the requirement suggestedby specialists in experimental design, of being a space-filling approach. The parameterto be set was called probGauss, which is the complement of the probability of selectionof interest (the probability of selection is 1-probGauss). In order to decide the range of
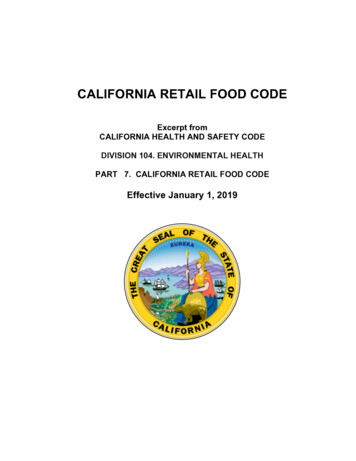
Particles:1 2 3 4 5 61 2 3 4 5 61 2 3 4 5 61 2 3 4 5 61 2 3 4 5 61 2 3 4 5 6Neighborhood size k 3 (Circle Topology)Figure 1. Possible neighborhoods.interest for probGauss, another empirical study had to been done. The algorithm wastested using values for probGauss of 0.0, 0.1, 0.2, . . . , 0.9 (for each of these values, thetest problems were evaluated). Positive results were found when using 0.0 and 0.1, whichled to select [0.0, 1.0] as the pre-defined range for probGauss. Then, 20 LHD designpoints within this range were generated and, again, the same 19 test problems wereevaluated. A number of 30 independent runs were performed with each test problems.The configuration having probGauss 0.075 provided the best overall results and was,therefore, chosen. Since probGauss 0.075, then the probability of selection was taken as1-probGauss 0.925.4.2.2. lbest Model: Circle TopologyA number of different topologies have been proposed to implement the lbest model(Kennedy 1999). The present approach uses a simple topology which produced goodresults on the functions tested: the circle topology. In this model, each particle is connected to its neighbors, determining a neighborhood of size k, that is, there are k 1neighbors for each particle. The neighbors are determined by the (consecutive) positionof the particles in the storage structure. Figure 1 illustrates this concept using a swarmof six particles and neighborhood size k 3, so that each particle has two neighborsand six neighborhoods can be considered. For each neighborhood, the best particle (pl)needs to be determined and it is used in equations (7) and (8) for the particles withinsuch neighborhood.4.2.3. Handling ConstraintsA variety of constraint-handling techniques have been proposed for evolutionary algorithms (Coello Coello 2002), but the one adopted in this work is quite simple. Theconstraint-handling method used in the proposed approach is based on the followingrule: “a feasible particle is preferred over an infeasible one”. When the two particlescompared are infeasible, the one closer to the feasible region is chosen. In order to dothat, the algorithm stores the largest violation obtained for each constraint in each gen-
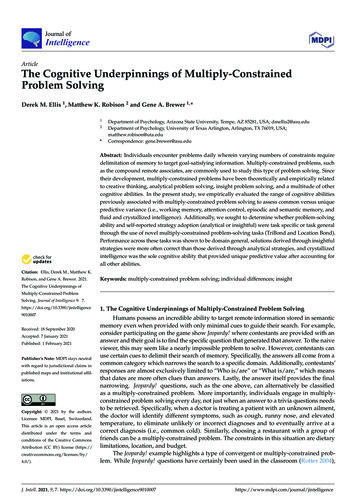
a run with Q cyclesε value:.Q/4.Q/2.3Q/4.Q{{{{00.10.010.0010.0001Figure 2. Variation of ǫ during a run of the PSO approach.eration. When an individual is found to be infeasible, the sum of its constraints violations(this value is normalized with respect to the largest violation stored so far) is the oneconsidered as its distance to the feasible region. This constraint-handling scheme is usedwhen the pbest, gbest and lbest particles are chosen.4.2.4. Dynamic ToleranceAs indicated before, in CPSO-shake, all the equality constraints are transformed intoinequalities. The value of ǫ used is adapted three times during the entire run. Whenthe search process starts, the value is initialized in 0.1. As the number of iterations isincreased, the value of ǫ is divided by 10 at three different moments during the search(i.e., ǫ takes the values: 0.01, 0.001 and 0.0001 along a full execution of the algorithm).For example, assuming that Q is the total number of iterations to be performed, thevalue of ǫ will change according to the scheme graphically shown in Figure 2.The main advantage of using a varying ǫ value is to favor the existence of feasiblesolutions at the beginning of the search process, by allowing almost-feasible solutions tobe treated as feasible. In that way, the search space can be properly sampled (particularlyin problems having equality constraints, which are normally hard to satisfy when usingan evolutionary algorithm). As the number of iterations increases, ǫ is decreased, so thatthe approach starts converging towards solutions that satisfy the equality constraintswith a higher accuracy.It is worth indicating that the above adaptation procedure is applied exactly threetimes, to arrive to a final ǫ value of 0.0001. This value corresponds to the tolerancecommonly adopted by other authors in their work (see for example Runarsson and Yao(2000)). Also, the experiments showed that applying the adaptation process three timeswas appropriate, since a lower number of times did not provide enough flexibility for therelaxation to have a significant impact on the search and a higher number did not allowsufficient time for the algorithm to reach the feasible region.4.2.5. Mutation OperatorA dynamic mutation operator (Cagnina et al. 2004) was adopted for maintaining diversity into the swarms. The operator is applied to each individual with a certain probability(pm). Such probability is computed considering the total number of iterations performedby the algorithm (cycles) and the current iteration (cycle) number, using the followingequation:pm max pm max pm min pm current cyclemax cycle(9)
where max pm and min pm are the maximum and minimum values that pm can take,max cycle is the total number of cycles that the algorithm will iterate, and current cycleis the current cycle in the iterative process. This operator is applied frequently at thebeginning of the search process (exploration), and its application decays as the numberof cycles increases (exploitation).4.3.CPSO-shake ModelThe modifications introduced to the previous CPSO approach are described next.4.3.1. Bi-populationThe idea of having several swarms in the population of a PSO algorithm has beenadopted before by several researchers (Liang and Suganthan 2005, Blackwell and Branke2006, Yen and Daneshyari 2006, Zhao et al. 2008, Trojanowski 2008). However, in mostcases, there are several small and dynamic swarms which are frequently regrouped at acertain moment during the search, and in all cases the swarms exchange information.Here, this concept is used in a different way.In the proposed CPSO-shake algorithm is applied the idea of maintaining more thanone group of particles that explore the search space at the same time. The aim of thisis to reduce the possibility of getting trapped in local optima. In the CPSO-shake algorithm, the entire population is split into only two static subpopulations, each of which isindependently evolved. No information is shared between the two swarms. In the papersindicated before, the sizes of the swarms change over time because the particles movefrom one swarm to a different one. However, in the approach introduced here, the swarmsizes remain constant.The issue that naturally arises here is why not to adopt more than two subpopulations.The pragmatic reason is: since the number of particles used in the population of thealgorithm is small, it is considered that it would be inappropriate to adopt more thantwo populations. In fact, the neighborhood topology would not work properly if fewerparticles were adopted in each sub-swarm than the current number and, therefore thereason for adopting only two subpopulations.All the features stated before for the entire population (neighborhoods, lbest and gbestapproaches, and equations for updating the velocity and the positions) remain withoutchanges, but in this case, they are applied not to a single population, but to each subpopulation. When the iterative process finishes, the best particle from both subpopulationsis reported as the final output.It is worth noting that the scheme with two subpopulations indicated before could beparallelized using two or more processors in order to speed it up.4.3.2. Shake MechanismIn some previous related work (Cagnina et al. 2006), it was found that stagnationproblems occur when trying to obtain values close to the optima for some difficult testfunctions. In order to overcome this problem, the algorithm reported in this paper incorporates a shake mechanism. This mechanism is applied when the percentage of infeasibleindividuals is higher than 10% (this value was empirically derived). It is worth noticingthat it is not convenient to keep populations in which all the solutions are feasible, sinceinfeasible solutions play an important role when trying to solve problems with activeconstraints, since they allow to explore the boundary between the feasible and infeasibleregions.
In order to implement the shake mechanism, some particles are moved to a differentplace in the search space. Although this can be done by guiding a particle to a randomdirection, it is undesirable that the particles move away too much (the objective is toshake them just a little!). So, a particle with a good solution is selected as a reference: arandomly chosen pbest particle (pbSELd ). Thus, equation (10) is used to move a particlei:vid X vid c1 r1 (pbSELd )(10)where vid is the dth-position of the velocity vector, X is the constriction factor, c1 is thepersonal learning factor multiplied by r1 , which is a random number within the range [0,1]. pbSELd is the dth-position of a
In this paper, it is precisely introduced a proposal of this sort, which can be useful to solve nonlinear constrained optimization problems. The approach is validated first with a test suite commonly adopted in the literature of constrained evolutionary optimization (i.e., evolutionary algorithms that have a constraint-handling mechanism), in .