Transcription
Connected AutomatedDriving RoadmapStatus: final for publicationVersion: 8Date: 08.03.2019ERTRAC Working Group"Connectivity and Automated Driving"
Connected Automated Driving RoadmapACKNOWLEDGEMENTSAs a European Technology Platform, ERTRAC gathers experts from the industry, researchproviders and public authorities. This roadmap was prepared by the Working Group “Connectivityand Automated Driving”, under the leadership of four co-leaders: Armin Graeter (BMW), MatsRosenquist (Volvo Group), Eckard Steiger (Bosch), and Manfred Harrer (ASFINAG). The previous“Automated Driving Roadmap” of ERTRAC was issued in 2017 and provided updated definitionsand development paths, an updated list of EU and international activities, and an extended list ofR&D challenges. This new 2019 version presents again a full update of these chapters, and giventhat the topic of connectivity is becoming progressively more important, it includes connectivityrelated aspects and the addition of infrastructure related topics. A collaboration with the CEDRCAD work group helped a lot to bring these additional aspects into the document. This newversion also builds on the STRIA CAT Roadmap developed by the European Commission.The following European projects have provided extensive support for the realisation of this roadmap:ARCADEFUTURE-RADAR2
TABLE OF CONTENTS1. Scope and Objectives42. Common Definitions52.1. Levels of Automation52.2. Operational Design Domain62.3. Vehicle and infrastructure interaction62.4. Regulatory and standardisation framework for Automation82.5. Connectivity as a requirement for vehicle-infrastructure interaction103. Development paths123.1. Automated Passenger Cars Path133.2. Automated Freight Vehicles Path153.3. Urban Mobility Vehicles174. EU and international initiatives194.1. European research projects194.2. European initiatives204.3. EU Member States initiatives284.4. Initiatives around the world375. Key Challenges and Objectives455.1. User awareness, users and societal acceptance and ethics, driver training465.2. Human Factors465.3. Policy and regulatory needs, European harmonisation475.4. Socio-economic assessment and sustainability485.5. Safety validation and roadworthiness testing485.6. New mobility services, shared economy and business models495.7. Big data, artificial intelligence and their applications495.8. Physical and Digital infrastructure (PDI) including Connectivity505.9. In-vehicle technology enablers515.10. Deployment526. Annex: definitions of systems – Levels 0 to 2 Parking536.1. Current and future vehicle systems – Level 0536.2. Current systems – Level 1536.3. Automated Driving Assistance - Level 2546.4. Automated Parking Assistance543
Connected Automated Driving Roadmap1. SCOPE AND OBJECTIVESThe main objective of the ERTRAC Roadmap is to provide a joint stakeholders view on thedevelopment of Connected Automated Driving in Europe. The Roadmap starts with commondefinitions of automation levels and systems, and then identifies the challenges for theimplementation of higher levels of automated driving functions. Development paths are providedfor three different categories of vehicles.The Key Challenges identified should lead to efforts of Research and Development: ERTRACcalls for pre-competitive collaboration among European industry and research providers. Thekey role of public authorities is also highlighted: for policy and regulatory needs, and support todeployment, with the objective of European harmonisation.Note about Connectivity: the scope of this roadmap is by purpose limited to not cover all aspectsof connectivity in Transport. Connectivity will be addressed only when it is used to support theautomation of driving functions.Why Connected Automated Driving?Connected Automated Driving is seen as one of the key technologies and major technologicaladvancements influencing and shaping our future mobility and quality of life. The main drivers forhigher levels of Automated Driving are: Safety: Reduce accidents caused by human errors. E fficiency and environmental objectives: Increase transport system efficiency and reducetime in congested traffic by new urban mobility solutions. Also, smoother traffic will help todecrease the energy consumption and emissions of the vehicles. Comfort: Enable user’s freedom for other activities when automated systems are active. Social inclusion: Ensure mobility for all, including elderly and impaired users. Accessibility: Facilitate access to city centres.Connected Automated Driving must therefore take a key role in the European Transport policy,since it can support several of its objectives and societal challenges, such as road safety,congestion, decarbonisation, social inclusiveness, etc. The overall efficiency of the transportsystem can be much increased thanks to automation. Traffic safety is of key importance forconnected automated driving: to ensure safe interaction with all road-users in mixed trafficenvironments, in particular with vulnerable road users (VRU) and motorcycles. See the new 2019ERTRAC roadmap for “Safe Road Transport”, which was developed in coordination with thisroadmap.Moreover, automated driving should be understood as a process taking place in parallel andpossibly in integration with other important evolution of road transport: the electrification ofthe powertrains, and the multiplication of mobility offers, especially shared mobility concepts.This roadmap for Connected Automated Driving therefore contributes to the long-term visionof ERTRAC for the transport system. In one sentence: by 2050, vehicles should be electrified,automated and shared.4
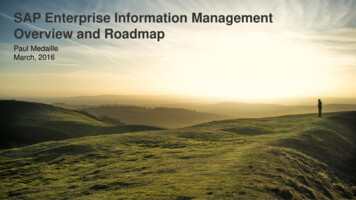
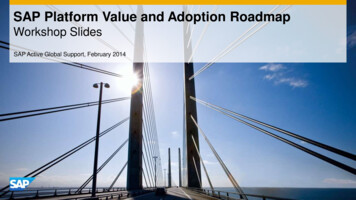
2. COMMON DEFINITIONSCommon Definitions2.1 Levels of Automation2.1. Levelsof AutomationERTRACacknowledgesthe definitions of SAE J3016 defining the Levels of Automated Driving.Their latest version shall be used, after the revision adopted in June 2018, as accessible on:ERTRAC acknowledges the definitions of SAE J3016the Levelsof t/j3016 201806The definingfigure belowis a summaryof ons and can be used for visual presentations, but experts shall always refer to the fullsaemobilus.sae.org/content/j3016 andard text.and can be used for visual presentations, but experts shall always refer to the full standard text.Figure 1: SAE Levels of Driving Automation for On-Road Vehicles (June 2018, copyright SAE);Figure 1: SAELevelsof DrivingdrivingAutomationOn-RoadVehicles (June2018,domaincopyright(ODD);SAE); ject anddynamic tandeventdetectionevent detection and response (OEDR); Automated Driving System (ADS) andresponse (OEDR); Automated Driving System (ADS)www.ertrac.org - Twitter - LinkedInPage 6 of 565
Connected Automated Driving Roadmap2.2. Operational Design DomainAccording to the SAE Definition, ODD are “Operating conditions under which a given drivingautomation system or feature thereof is specifically designed to function, including, but notlimited to, environmental, geographical, and time-of-day restrictions, and/or the requisitepresence or absence of certain traffic or roadway characteristics.” (SAEJ3016-201806)Operational design domain (ODD) is a description of the specific operating conditions in whichthe automated driving system is designed to properly operate, including but not limited toroadway types, speed range, environmental conditions (weather, daytime/night time, etc.),prevailing traffic law and regulations, and other domain constraints. An ODD can be very limited:for instance, a single fixed route on low-speed public streets or private grounds (such as businessparks) in temperate weather conditions during daylight hours.The ODD is relevant to all levels of automation except for 0 (No Driving Automation) and 5 (FullDriving Automation), since the attributes of the ODD are directly connected to the way theautomated driving system works. It is up to the manufacturers of the system to specify the ODDfor their automated driving system, but a coordinated approach is the most promising. Manydifferent use cases have been analysed and evaluated by EU EIP Activity 4.2, a work group of theEuropean ITS Platform.1Typical ODD differentiation is based on different types of roads: some roads and areas are moresuitable to introduce systems involving high level of automation, before they can be deployed toopen roads. Confined areas with restricted access control, such as terminal areas and ports. D edicated road/lane where vehicles with specific automation level(s) are allowed but thearea is not confined, such as parking areas and dedicated lanes. O pen road with mixed traffic in single or multiple lane operation on local, regional, andhighway operation, for use by vehicles with any automation level. Local, regional, national andEuropean and cross border regulation need to be taken into consideration when targetingautomation level.2.3. Vehicle and infrastructure interactionLong term visionThe road infrastructure can support and guide automated vehicles by using physical anddigital elements. The infrastructure support levels for automated driving (ISAD) can be used toinform automated vehicles about the road capability on certain road segments. The underlyingexchanged information from sporadic connectivity to cooperate guiding support are described.Several research activities are started to develop new infrastructure elements as well as newtraffic management strategies for supporting automated vehicles in critical situations. In orderto evaluate and test the new infrastructure concepts several AD test sites are deployed whereof61 https://www.its-platform.eu/
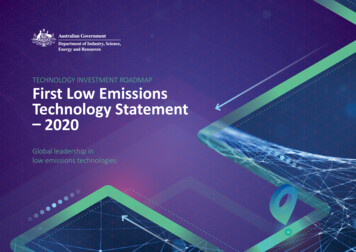
the latest status in Austria and Spain is presented. Further the infrastructure data can be alignedwith automotive safety integrity level.The users’ driving and travel experience will be explored to provide an incentive for OEMs tocooperate with the infrastructure, since it can provide additional information for on-boarddecisions of CAVs. This requires answering the question as what the prerequisites towardsthe infrastructure from vehicle side are. The most basic step, a classification of infrastructureis needed, which ISAD levels can provide. Still, a common understanding between OEMs,automotive industry and road operators is to be established.2.3.1. ISADThe environmental perception of automated vehicles is limited by the range and capability of on‐board sensors. Road infrastructure operators already employ numerous traffic and environmentalsensors and provide information that can be perceived by automated vehicles. In order to classifyand harmonize the capabilities of a road infrastructure to support and guide automated vehicles,we support a simple classification scheme, similar to SAE levels for the automated vehiclecapabilities, following the work of the EU research project INFRAMIX2. This project is preparingthe road infrastructure to support the transition period and the coexistence of conventional andautomated vehicles. Its main target is to design, upgrade, adapt and test both physical and digitalelements of the road infrastructure, ensuring an uninterrupted, predictable, safe and efficienttraffic. Although INFRAMIX is targeting mainly highways, since they are expected to be the initialhosts of such mixed traffic, its key results can be easily transferred to urban roads.The levels we support and which are being developed in INFRAMIX are called InfrastructureSupport levels for Automated Driving (ISAD) and can be assigned to parts of the network in orderto give automated vehicles and their operators guidance on the “readiness” of the road networkfor the coming highway automation era.ConventionalinfrastructureCDEBased on the real-time information on vehicle movements, theinfrastructure is able to guide AVs (groups of vehicles or singlevehicles) in order to optimize the overall traffic flow.Infrastructure is capable of perceiving microscopic traffic situationsCooperative perceptionand providing this data to AVs in real-timeAll dynamic and static infrastructure information is available inDynamic digital informationdigital form and can be provided to AVs.Digital map data is available with static road signs. Map data couldStatic digital information / be complemented by physical reference points (landmarks signs).Map supportTraffic lights, short term road works and VMS need to be recognizedby AVs.Conventional infrastructure / Conventional infrastructure without digital information. AVs need tono AV supportrecognise road geometry and road signs.Cooperative drivingGuidance: speed,gap, lane adviceBDescriptionMicroscopic trafficsituationANameVMS, warnings,incidents, weatherDigitalinfrastructureLevelDigital map withstatic road signsFigure 2 “ISAD levels” shows the description of the five ISAD levels, along with the informationthat is provided to automated vehicles.XXXXXXXXXXFigure2 "ISADLevels"Figure2: "ISADLevels"2Infrastructure support levels are meant to describe road or motorway sections rather than whole roadnetworks. This reflects common practice of infrastructure deployment: Traffic control systems (sensorsand VMS) are usually deployed on motorway sections where traffic often reaches the capacity limit(e.g.in metropolitan areas), whereas other motorway sections need no fixed installations of traffic https://www.inframix.eu/control systems because traffic flow is rarely disrupted. The five levels increase in added support from7
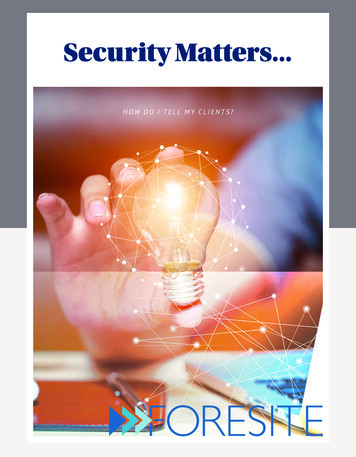
ConventionalinfrastructureABCDEBased on the real-time information on vehicle movements, theinfrastructure is able to guide AVs (groups of vehicles or singlevehicles) in order to optimize the overall traffic flow.Infrastructure is capable of perceiving microscopic traffic situationsCooperative perceptionand providing this data to AVs in real-timeAll dynamic and static infrastructure information is available inDynamic digital informationdigital form and can be provided to AVs.Digital map data is available with static road signs. Map data couldStatic digital information / be complemented by physical reference points (landmarks signs).Map supportTraffic lights, short term road works and VMS need to be recognizedby AVs.Conventional infrastructure / Conventional infrastructure without digital information. AVs need tono AV supportrecognise road geometry and road signs.Cooperative drivingGuidance: speedgap, lane adviceDigitalinfrastructureConnected Automated Driving RoadmapMicroscopic traffisituationDescriptionVMS, warnings,incidents, weatheNameDigital map withstatic road signsLevelXXXXXXXXXXFigure 2 "ISAD Levels"Infrastructuresupport levels are meant to describe road or motorway sections rather than wholeroadInfrastructurenetworks. Thisreflectsinfrastructurecontrolsupportlevels commonare meant practiceto describeofroador motorwaydeployment:sections ratherTrafficthan orwaysectionswheretrafficoftenroad networks. This reflects common practice of infrastructure deployment: Traffic controlreachesthe (sensorscapacityandlimit(e.g. arein usually deployedon whereasmotorwayothersectionswhere trafficoftenno fixedinstallationsoflimittrafficcontrolsystems becausetraffic flowrarely disrupted.reachesthe capacity(e.g.in metropolitanareas), whereasotherismotorwaysections Theneedfivelevelsin added ofsupportfrom E systemsto A. Thisexample(Figure3) rarelyillustrateshow ISADlevelsno increasefixed installationstraffic controlbecausetrafficflow isdisrupted.The fivecan levelsbe usedfor a simpledescriptionof whatvehiclescan expecton specificparts ofincreasein addedsupport fromE to automatedA. This example(Figure3) illustrateshow ISADlevelscan be used for a simple description of what automated vehicles can expect on specifica roadnetwork.parts of a road network.Figure 3 “ISAD Example”Figure3: “ISAD Example”2.4 Regulatoryandstandardisation framework for AutomationThe vehicle operates under two major regulations: the homologation framework and the onframeworkfor toAutomationframework.new concepts of ODDand ISAD needcomply with theconstraints defined by these frameworks. The status today forms constraints for theThe vehicle operates under two major regulations: the homologation framework and the trafficregulation framework. The new concepts of ODD and ISAD need to comply with the constraintsdefined by these frameworks. The status today forms constraints for the implementation ofautomation.It- isclearthat both frameworks at the same time have to evolve themselves to caterwww.ertrac.orgTwitter- LinkedInPage 9 of 56properly for future traffic with higher automation levels and mixed traffic.Additional research needs to be carried out and a joint approach between telecom and vehicleindustry as well as cross-border pilot projects and the adaptation of road traffic rules in MemberStates can all support to reach a consensus in this field. The deployment of CAD may behampered if there are no collaborative actions towards a coordinated and quick development of8
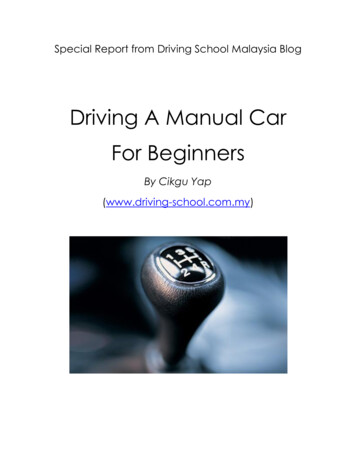
implementation of automation. It is clear that both frameworks at the same time have to evolvethemselves to cater properly for future traffic with higher automation levels and mixed traffic.Additional research needs to be carried out and a joint approach between telecom and vehicleindustry as well as cross-border pilot projects and the adaptation of road traffic rules in MemberEuropean-wide regulations and laws enabling testing and use of automated vehicles on publicStates can all support to reach a consensus in this field. The deployment of CAD may beroads. By solving regulatory issues, the public will start to accept and use automated vehicleshampered if there are no collaborative actions towards a coordinated and quick development ofsooner, leading to a better market penetration and a competitive advantage for the EU on theregulations and laws enabling testing and use of automated vehicles on publicfield ofEuropean-wideautomated driving.roads. By solving regulatory issues, the public will start to accept and use automated vehiclesleadingto a thebettermarketpenetrationandwhicha competitivetheonEU on aintsundera vehicle isadvantageallowed toformovefieldcoveringof automatedthe road,aspectsdriving.like speed, allowed vehicle characteristics like width, height, constraintswhichetc.a vehicleis allowed to moveand permissible movements like laneright/leftturn, underovertaking,Traffic regulationson the road, ofcoveringaspects level,like speed,vehiclecharacteristicslikeapply independentthe automationso theyallowedcan providean importantinput tothewidth,ODD height,assessment.weight and permissible movements like lane change, right/left turn, overtaking, etc. Trafficregulations apply independent of the automation level, so they can provide an important inputTraffictoregulationsare implemented traditionally in the ISAD level E world via “road signs”the ODD assessment.placedTrafficon, aboveor near thewhere thetraditionallyterm sign tedin theroadISADlevel E Vehiclesworld via“road signs”traffic ectionprobabilitymaybelimitedinon, above or near the road, where the term sign includes road markings. thetraffic regulations via sensors (e.g. cameras), but the detection probability may be limited incurrently valid traffic regulations at the same time form an important part of the ISAD content.difficult environments (adverse weather conditions, sign “forest” in urban scenarios), hence theIn future Level 5 scenarios independent of traditional visualisation means more dynamic trafficcurrently valid traffic regulations at the same time form an important part of the ISAD content.regulations become possible – e.g. access regulations based on certain vehicle criteria that onlyIn future Level 5 scenarios independent of traditional visualisation means more dynamic trafficapply if certain conditions are met – which would make traffic regulations as an element of ISADregulations become possible – e.g. access regulations based on certain vehicle criteria that onlymandatory.apply if certain conditions are met – which would make traffic regulations as an element ofISAD mandatory.Figure 4 Regulatory and standards framework for AutomationElaborationof ODDand ISADshouldforbeAutomationperformedFigure4: Regulatoryand standardsframeworkcollectively in a pre-competitiveenvironment between automotive and infrastructure sectors. ISAD will provide importantelementsfor andODDdefinitions,regarding collectivelydigital infrastructure(e.g. availabilityof electronicElaborationof ODDISADshould be performedin a pre-competitiveenvironmenttrafficregulation)as well as physicalinfrastructure(e.g.about elementsroad markingquality orbetweenautomotiveand infrastructuresectors. ISADwill provideimportantfor ODDdefinitions,regardingdigitalinfrastructure(e.g. Theavailabilityof electronicas based onstandardisedroadlayoutsin roadworks).ISAD interfaceneedstrafficto be regulation)standardisedwell asODDphysicalinfrastructure (e.g. about road marking quality or standardised road layouts inrequirements.roadworks). The ISAD interface needs to be standardised based on ODD requirements.9www.ertrac.org - Twitter - LinkedIn
Connected Automated Driving RoadmapConnectivity asasa requirementfor tya requirementfor vehicle-infrastructureinteractionWhilstthe automation side is heavily discussed, one should not overlook the connectivityaspectsof CAD. Forsidehigherautomationlevels, oneconnectivityis aoverlookpivotal aspectgiven theWhilstthe automationis heavilydiscussed,should notthe dparties.Toensureaproductivedevelopmentofaspects of CAD. For higher automation levels, connectivity is a pivotal aspect given theCAD, each participant must also be aware where he is located not only geographically but alsonecessaryinteractions between all involved parties. To ensure a productive development ofdigitally in relation to the other stakeholders in this connected network. The understanding andCAD,each participant must also be aware where he is located not only geographically but alsodevelopment of connectivity can and should of course be further elaborated and supported bydigitally in relation to the other stakeholders in this connected network. The understanding andthe involved stakeholders.development of connectivity can and should of course be further elaborated and supported bythe Theinvolvedstakeholders.currently developed communication profiles and services connect all involved parties viaTheshortcurrentlycommunicationprofiles thisandconnectivityservices connectall them,involvedpartiesrangedevelopedcommunication.To further improvebetweenthereis rovethis connectivitybetweenthem,differentthere is alsotherangeoptionto support hybridsame contentcan be sentout throughthe media,option compatibleto support fferentmedia,and interoperable.compatible and interoperable.An Anoverviewdata rviewofof thethe datanationalroadroadauthoritiescan becanseenFigurein5 Figure .“Stakeholdersin inNRA5: “Stakeholdersin NRAdata exchange”Figure 5Figure“Stakeholdersin NRA dataexchange”10This can further be supported by multi-channel communication to upgrade existing ITS servicesusing conventional standard system architectures and message formats. It is important here touse standardised mappings from C-ITS data structures to existing standards (e.g. DATEX II) toensure interoperability. This adds another layer to connectivity.A major factor for the future evolution of connectivity will be the emergence of 5G networks.The 5G technology will be much more powerful than today’s 3G/4G networks. In the currentpractice mobile networks are mainly used as simple access networks to the mobile internet.Mobile stations (vehicles, smartphones, etc.) have point to point links to services. Althoughproposed hybrid communication architectures de-facto provide geographical addressing viamessage brokers, the underlying communication technology is still based on point to pointcommunication. 5G may potentially change this with sophisticated architectural features likemobile edge computing and unprecedented bandwidth and latency characteristics. This mayallow connectivity patterns that go beyond what is possible today.
This can further be supported by multi-channel communication to upgrade existing ITS servicesusing conventional standard system architectures and message formats. It is important here touse standardised mappings from C-ITS data structures to existing standards (e.g. DATEX II) toensure interoperability. This adds another layer to connectivity.A major factor for the future evolution of connectivity will be the emergence of 5G networks.The 5G technology will be much more powerful than today’s 3G/4G networks. In the currentpractice mobile networks are mainly used as simple access networks to the mobile internet.Mobile stations (vehicles, smartphones, etc.) have point to point links to services. Althoughproposed hybrid communication architectures de-facto provide geographical addressing viamessage brokers, the underlying communication technology is still based on point to pointcommunication. 5G may potentially change this with sophisticated architectural features likemobile edge computing and unprecedented bandwidth and latency characteristics. This mayallow connectivity patterns that go beyond what is possible today.11
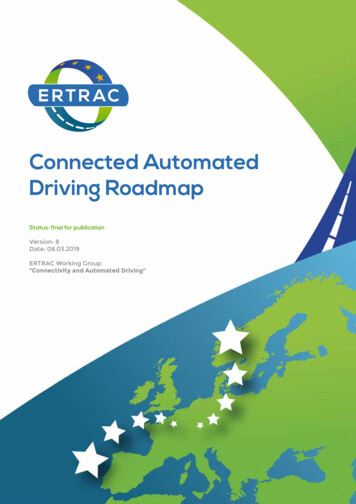
Connected Automated Driving Roadmap3. DEVELOPMENT PATHSStakeholders involved in ERTRAC share the vision of a progressive step-wise increase ofautomation levels during the upcoming decade. The main development paths for the differentautomation levels are shown in the Figure 2 below.Major collaborative projects funded by the EU are currently looking at the first levels ofautomation and organizing testing in order to prepare their roll-out in Europe: the L3Pilot3 projectfor automated passenger cars, and the ENSEMBLE4 project for multi-brand truck platooning.These projects were strongly promoted by the previous versions of the ERTRAC roadmap. Thefocus for this version of the roadmap is on High Automation - Level 4.The development paths indicate the timeframe to reach levels of TRL 7-9, to be understood as ready froma technology perspective. We refer to the TRL levels definition used within the Horizon 2020 programme5: TRL 7 – system prototype demonstration in operational environment TRL 8 – system complete and qualified TRL 9 – actual system proven in operational environmentAutomation LevelEstablished20182020202220242026Level 5:Full Automation.Auto PilotLevel 3:ConditionalAutomationChauffeurLevel 2:Partial AutomationLevel 0:No DrivingAutomation, supportbeyond humancapability to act2030Full AutomationLevel 4:High AutomationLevel 1:Driver Assistance2028Driving AssistanceAdvanced DriverAssistance Systems(ADAS)Warning or Supportby active safetysystemsFigure 6: The vehicle automation development paths31245 https://www.l3pilot.eu https://platooningensemble.eu f/h2020/wp/2014 2015/annexes/h2020-wp1415-annex-g-trl en.pdf
Since road transport includes various types of vehicles, it is important to detail the developmentpaths into specific roadmaps reflecting the different opportunities of each vehicle category.The following subchapters present three different roadmaps providing a specific outlook for:passenger cars, freight-vehicles, and urban mobility vehicles and buses.3.1. Automated Passenger Cars PathPassenger cars are the main driver of the development towards automated driving, as with theirhigh volume in the market, they can afford to develop the necessary technologies. They evolvelevel by level with more sensors, connectivity and computing power on- and off-board and canbe distinguished by parking and driving use cases. All level 0 to 2 systems definitions have nowbeen placed in the Annex of this roadmap version, as well as the automated parking assistancesystems.Automated Passenger Car Development PathsAutomation LevelEstablished2018202020222024202620282030.Level 5:Full AutomationFully AutomatedPassenger CarsUrban and Sub-Urban PilotLevel 4:High AutomationLevel 3:ConditionalAutomationHighway Autopilot includingHighway ConvoyHighway ChauffeurTraffic Jam ChauffeurLevel 2:Partial AutomationTraffic Jam AssistParking AssistLevel 1:Driver AssistanceAdaptive Cruise ControlStop &GoLane Keeping AssistLane Change AssistParking assistLevel 0:No DrivingAutomation, supportbeyond humancapability to actLane Departure WarningBlind-spot WarningForward Collission WarningABS, ESCEmergency BrakeIn dic ativeede vlopmenthst paTR L7- 9Passenger Cars: M1 categoryFigure 7: The Automated Driving development path for passenger cars13
Connected Automated Driving Roadmap3.1.1. Traffic Jam Chauffeur (Level 3)Conditional automated driving in traffic jam up to 60 km/h on motorways and motorway similarroads. The system can be activated in case of a traffic jam scenario. It detects slow drivingvehicle in front and then handles the vehicle’s both longitudinal and lateral. Later version of thisfunctionality might include lane change functionality. The driver must deliberately activate thesystem, but does not have to monitor the system con
2.1. Levels of Automation 5 2.2. Operational Design Domain 6 2.3. Vehicle and infrastructure interaction 6 2.4. Regulatory and standardisation framework for Automation 8 2.5. Connectivity as a requirement for vehicle-infrastructure interaction 10 3. Development paths 12 3.1. Automated Passenger Cars Path 13 3.2. Automated Freight Vehicles Path .