Transcription
424MATHEMATICSChapter10heVECTOR ALGEBRA In most sciences one generation tears down what another has built and whatbl10.1 Introductionisone has established another undoes. In Mathematics alone each generationbuilds a new story to the old structure. – HERMAN HANKEL no NCtt Eo Rbe TrepuIn our day to day life, we come across many queries suchas – What is your height? How should a football player hitthe ball to give a pass to another player of his team? Observethat a possible answer to the first query may be 1.6 meters,a quantity that involves only one value (magnitude) whichis a real number. Such quantities are called scalars.However, an answer to the second query is a quantity (calledforce) which involves muscular strength (magnitude) anddirection (in which another player is positioned). Suchquantities are called vectors. In mathematics, physics andengineering, we frequently come across with both types ofW.R. Hamiltonquantities, namely, scalar quantities such as length, mass,(1805-1865)time, distance, speed, area, volume, temperature, work,money, voltage, density, resistance etc. and vector quantities like displacement, velocity,acceleration, force, weight, momentum, electric field intensity etc.In this chapter, we will study some of the basic concepts about vectors, variousoperations on vectors, and their algebraic and geometric properties. These two type ofproperties, when considered together give a full realisation to the concept of vectors,and lead to their vital applicability in various areas as mentioned above.10.2 Some Basic ConceptsLet ‘l’ be any straight line in plane or three dimensional space. This line can be giventwo directions by means of arrowheads. A line with one of these directions prescribedis called a directed line (Fig 10.1 (i), (ii)).
425heVECTOR ALGEBRAisFig 10.1blNow observe that if we restrict the line l to the line segment AB, then a magnitudeis prescribed on the line l with one of the two directions, so that we obtain a directedline segment (Fig 10.1(iii)). Thus, a directed line segment has magnitude as well asdirection. no NCtt Eo Rbe TrepuDefinition 1 A quantity that has magnitude as well as direction is called a vector.uuurNotice that a directed line segment is a vector (Fig 10.1(iii)), denoted as AB oruuurrsimply as ar , and read as ‘vector AB ’ or ‘vector a ’.uuurThe point A from where the vector AB starts is called its initial point, and thepoint B where it ends is called its terminal point. The distance between initial andterminal points of a vector is called the magnitude (or length) of the vector, denoted asuuurr AB , or a , or a. The arrow indicates the direction of the vector. NoterSince the length is never negative, the notation a 0 has no meaning.Position VectorFrom Class XI, recall the three dimensional right handed rectangular coordinatesystem (Fig 10.2(i)). Consider a point P in space, having coordinates (x, y, z) withuuurrespect to the origin O (0, 0, 0). Then, the vector OP having O and P as its initial andterminal points, respectively, is called the position vector of the point P with respectuuurrto O. Using distance formula (from Class XI), the magnitude of OP (or r ) is given byuuur OP x2 y 2 z 2In practice, the position vectors of points A, B, C, etc., with respect to the origin Or r rare denoted by a , b , c , etc., respectively (Fig 10.2 (ii)).
MATHEMATICSishe426Fig 10.2Direction Cosines no NCtt Eo Rbe TrepubluuurrConsider the position vector OP or r of a point P(x, y, z) as in Fig 10.3. The angles α,rβ, γ made by the vector r with the positive directions of x, y and z-axes respectively,are called its direction angles. The cosine values of these angles, i.e., cos α, cos β andrcos γ are called direction cosines of the vector r , and usually denoted by l, m and n,Zrespectively.CzOP(x,y,z)ryBxAOXYP90 AFig 10.3XFrom Fig 10.3, one may note that the triangle OAP is right angled, and in it, wexrhave cos α ( r stands for r ) . Similarly, from the right angled triangles OBP andryzOCP, we may write cos β and cos γ . Thus, the coordinates of the point P mayrralso be expressed as (lr, mr,nr). The numbers lr, mr and nr, proportional to the directionrcosines are called as direction ratios of vector r , and denoted as a, b and c, respectively.
VECTOR ALGEBRA Note427One may note that l 2 m2 n2 1 but a2 b2 c2 1, in general.10.3 Types of VectorsheZero Vector A vector whose initial and terminal points coincide, is called a zerorvector (or null vector), and denoted as 0 . Zero vector can not be assigned a definitedirection as it has zero magnitude. Or, alternatively otherwise, it may be regarded asuuur uuurhaving any direction. The vectors AA, BB represent the zero vector,isUnit Vector A vector whose magnitude is unity (i.e., 1 unit) is called a unit vector. Therunit vector in the direction of a given vector a is denoted by â .blCoinitial Vectors Two or more vectors having the same initial point are called coinitialvectors. no NCtt Eo Rbe TrepuCollinear Vectors Two or more vectors are said to be collinear if they are parallel tothe same line, irrespective of their magnitudes and directions.rrEqual Vectors Two vectors a and b are said to be equal, if they have the samemagnitude and direction regardless of the positions of their initial points, and writtenr ras a b .Negative of a Vector A vector whose magnitude is the same as that of a given vectoruuur(say, AB ), but direction is opposite to that of it, is called negative of the given vector.uuuruuuruuuruuurFor example, vector BA is negative of the vector AB , and written as BA AB .Remark The vectors defined above are such that any of them may be subject to itsparallel displacement without changing its magnitude and direction. Such vectors arecalled free vectors. Throughout this chapter, we will be dealing with free vectors only.Example 1 Represent graphically a displacementof 40 km, 30 west of south.uuurSolution The vector OP represents the requireddisplacement (Fig 10.4).Example 2 Classify the following measures asscalars and vectors.(i) 5 seconds(ii) 1000 cm3Fig 10.4
MATHEMATICS(ii) Volume-scalar(v) Density-scalarExample 3 In Fig 10.5, which of the vectors are:(i) Collinear(ii) EqualSolutionrr r(i) Collinear vectors : a , c and d .rr(ii) Equal vectors : a and c .r rr(iii) Coinitial vectors : b , c and d .(iii) Force-vector(vi) Velocity-vector(iii) CoinitialheSolution(i) Time-scalar(iv) Speed-scalar(v) 10 g/cm3is(iii) 10 Newton(iv) 30 km/hr(vi) 20 m/s towards northbl428 no NCtt Eo Rbe TrepuFig 10.5EXERCISE 10.11. Represent graphically a displacement of 40 km, 30 east of north.2. Classify the following measures as scalars and vectors.(i) 10 kg(ii) 2 meters north-west (iii) 40 (iv) 40 watt(v) 10–19 coulomb(vi) 20 m/s23. Classify the following as scalar and vector quantities.(i) time period(ii) distance(iii) force(iv) velocity(v) work done4. In Fig 10.6 (a square), identify the following vectors.(i) Coinitial(ii) Equal(iii) Collinear but not equal5. Answer the following as true or false.rr(i) a and a are collinear.(ii) Two collinear vectors are always equal inmagnitude.Fig 10.6(iii) Two vectors having same magnitude are collinear.(iv) Two collinear vectors having the same magnitude are equal.
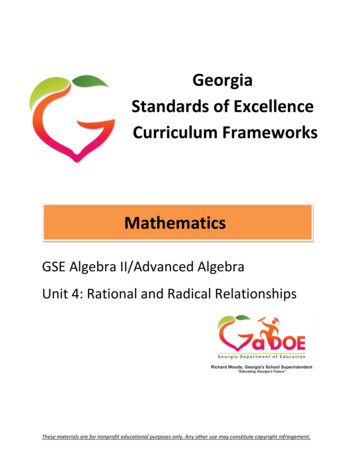
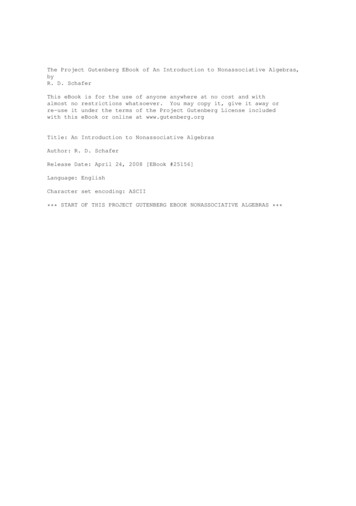
VECTOR ALGEBRA42910.4 Addition of VectorsheuuurA vector AB simply means the displacement from apoint A to the point B. Now consider a situation that agirl moves from A to B and then from B to C(Fig 10.7). The net displacement made by the girl fromuuurpoint A to the point C, is given by the vector AC andexpressed asuuuruuur uuurAC AB BCisFig 10.7blThis is known as the triangle law of vector addition.rrIn general, if we have two vectors a and b (Fig 10.8 (i)), then to add them, theyare positioned so that the initial point of one coincides with the terminal point of theother (Fig 10.8(ii)). no NCtt Eo Rbe TrepuCbaa(i)A ba(ii)Fig 10.8bBAaa –b(iii)CbB–bC’rFor example, in Fig 10.8 (ii), we have shifted vector b without changing its magnituderand direction, so that it’s initial point coincides with the terminal point of a . Then, ther rvector a b , represented by the third side AC of the triangle ABC, gives us the sumrr(or resultant) of the vectors a and b i.e., in triangle ABC (Fig 10.8 (ii)), we haveuuur uuuruuurAB BC ACuuuruuurNow again, since AC CA , from the above equation, we haveuuur ruuur uuur uuurAB BC CA AA 0This means that when the sides of a triangle are taken in order, it leads to zeroresultant as the initial and terminal points get coincided (Fig 10.8(iii)).
430MATHEMATICSuuuruuuurNow, construct a vector BC′ so that its magnitude is same as the vector BC , butthe direction opposite to that of it (Fig 10.8 (iii)), i.e.,uuuruuuurBC′ BC no NCtt Eo Rbe TrepublisheThen, on applying triangle law from the Fig 10.8 (iii), we haveuuuruuuruuuur uuur uuuurr rAC′ AB BC′ AB ( BC) a bruuuurrThe vector AC′ is said to represent the difference of a and b .Now, consider a boat in a river going from one bank of the river to the other in adirection perpendicular to the flow of the river. Then, it is acted upon by two velocityvectors–one is the velocity imparted to the boat by its engine and other one is thevelocity of the flow of river water. Under the simultaneous influence of these twovelocities, the boat in actual starts travelling with a different velocity. To have a preciseidea about the effective speed and direction(i.e., the resultant velocity) of the boat, we havethe following law of vector addition.rrIf we have two vectors a and b representedby the two adjacent sides of a parallelogram inmagnitude and direction (Fig 10.9), then theirr rsum a b is represented in magnitude anddirection by the diagonal of the parallelogramthrough their common point. This is known asthe parallelogram law of vector addition. NoteorFig 10.9From Fig 10.9, using the triangle law, one may note thatuuur uuuruuurOA AC OCuuur uuuruuur uuuruuur(since AC OB )OA OB OCwhich is parallelogram law. Thus, we may say that the two laws of vectoraddition are equivalent to each other.Properties of vector additionrrProperty 1 For any two vectors a and b ,r rr ra b b a(Commutative property)
blisFig 10.10 no NCtt Eo Rbe TrepuProof Consider the parallelogram ABCDuuur ruuur r(Fig 10.10). Let AB a and BC b , then usingthe triangle law, from triangle ABC, we haveuuurr rAC a bNow, since the opposite sides of aparallelogram are equal and parallel, fromuuur uuur rFig 10.10, we have, AD BC b anduuur uuur rDC AB a . Again using triangle law, fromtriangle ADC, we haveuuuur uuur uuur r rAC AD DC b ar rr rHencea b b ar rrProperty 2 For any three vectors a , b and c431heVECTOR ALGEBRAr r rr r r(Associative property)(a b ) c a (b c )uuur uuuruuurr rrProof Let the vectors a , b and c be represented by PQ, QR and RS , respectively,as shown in Fig 10.11(i) and (ii).ThenandSoFig 10.11uuur uuur uuurrra b PQ QR PRuuur uuur uuurr rb c QR RS QSr rr uuur uuur uur(a b ) c PR RS PS
432MATHEMATICSuuur uuur uurr r ra (b c ) PQ QS PSr r rr r r(a b ) c a (b c )andHenceisheRemark The associative property of vector addition enables us to write the sum ofr r rr r rthree vectors a , b , c as a b c without using brackets.rNote that for any vector a , we haver r r r ra 0 0 a arHere, the zero vector 0 is called the additive identity for the vector addition.10.5 Multiplication of a Vector by a Scalara–212 a12 aa2a no NCtt Eo Rbe TrepublrrLet a be a given vector and λ a scalar. Then the product of the vector a by the scalarrrλ, denoted as λ a , is called the multiplication of vector a by the scalar λ. Note that,rrrλ a is also a vector, collinear to the vector a . The vector λ a has the direction samer(or opposite) to that of vector a according as the value of λ is positive (or negative).rrAlso, the magnitude of vector λ a is λ times the magnitude of the vector a , i.e.,rr λa λ a A geometric visualisation of multiplication of a vector by a scalar is givenin Fig 10.12.Fig 10.12rrWhen λ – 1, then λa a, which is a vector having magnitude equal to therrrmagnitude of a and direction opposite to that of the direction of a . The vector – a isrcalled the negative (or additive inverse) of vector a and we always haver r rrra (– a ) (– a ) a 0r1Also, if λ r , provided a a r0, i.e. a is not a null vector, then1 rrr λa λ a r a 1 a
VECTOR ALGEBRA433rrSo, λ a represents the unit vector in the direction of a . We write it as1 râ r a a r rNote For any scalar k, k 0 0.he blare called unit vectors along the axes OX, OY and OZ,respectively, and denoted by iˆ, ˆj and kˆ , respectivelyis10.5.1 Components of a vectorLet us take the points A(1, 0, 0), B(0, 1, 0) and C(0, 0, 1) on the x-axis, y-axis andz-axis, respectively. Then, clearlyuuuruuuruuur OA 1, OB 1 and OC 1uuur uuuruuurThe vectors OA, OB and OC , each having magnitude 1, no NCtt Eo Rbe Trepu(Fig 10.13).Fig 10.13uuurNow, consider the position vector OP of a point P (x, y, z) as in Fig 10.14. Let P1be the foot of the perpendicular from P on the plane XOY. We, thus, see that P1 P isFig 10.14parallel to z-axis. As iˆ, ˆj and kˆ are the unit vectors along the x, y and z-axes,uuur uuurrespectively, and by the definition of the coordinates of P, we have P1P OR zkˆ .uuuruuur uuurSimilarly, QP1 OS yjˆ and OQ xiˆ .
434MATHEMATICSTherefore, it follows thatanduuur uuur uuurOP1 OQ QP1 xiˆ yjˆuuur uuuuruuurOP OP1 P1P xiˆ yjˆ zkˆheHence, the position vector of P with reference to O is given byuuurrOP (or r ) xiˆ yjˆ zkˆ no NCtt Eo Rbe TrepublisThis form of any vector is called its component form. Here, x, y and z are calledras the scalar components of r , and xiˆ, yjˆ and zkˆ are called the vector componentsrof r along the respective axes. Sometimes x, y and z are also termed as rectangularcomponents.rThe length of any vector r xiˆ yjˆ zkˆ , is readily determined by applying thePythagoras theorem twice. We note that in the right angle triangle OQP1 (Fig 10.14)uuuuruuuruuuur OP 1 OQ 2 QP1 2 x 2 y 2 ,and in the right angle triangle OP1P, we haveuuuruuuruuur( x2OP OP1 2 P1P 2rHence, the length of any vector r xiˆ yjˆ zkˆ is given byy2 )z2r r xiˆ yjˆ zkˆ x 2 y 2 z 2rrIf a and b are any two vectors given in the component form a1iˆ a2 ˆj a3 kˆ andb1iˆ b2 ˆj b3 kˆ , respectively, thenrr(i) the sum (or resultant) of the vectors a and b is given byr ra b (a1 b1 )iˆ (a2 b2 ) ˆj (a3 b3 )kˆrr(ii) the difference of the vector a and b is given byr ra b (a1 b1 )iˆ (a2 b2 ) ˆj (a3 b3 )kˆrr(iii) the vectors a and b are equal if and only ifa1 b1, a2 b2 and a3 b3r(iv) the multiplication of vector a by any scalar λ is given byrλa ( a1 )iˆ ( a2 ) ˆj ( a3 )kˆ
VECTOR ALGEBRA435heThe addition of vectors and the multiplication of a vector by a scalar together givethe following distributive laws:rrLet a and b be any two vectors, and k and m be any scalars. Then(i) kar mar (k m)arrr(ii) k (ma ) (km)arr rr(iii) k (a b ) ka kbRemarks12blisr(i) One may observe that whatever be the value of λ, the vector λa is alwaysrrrcollinear to the vector a . In fact, two vectors a and b are collinear if and onlyrrrrif there exists a nonzero scalar λ such that b λa . If the vectors a and b arerrgiven in the component form, i.e. a a iˆ a ˆj a kˆ and b b iˆ b ˆj b kˆ ,3123 no NCtt Eo Rbe Treputhen the two vectors are collinear if and only ifb1iˆ b2 ˆj b3 kˆ λ(a1iˆ a2 ˆj a3 kˆ) r(ii) If ab1iˆ b2 ˆj b3 kˆ (λa1 )iˆ (λa2 ) ˆj (λa3 )kˆb1 λa1 , b2 λa2 , b3 λ a3b1bb 2 3 λa1a2 a3ra1iˆ a2 ˆj a3 kˆ , then a1, a2, a3 are also called direction ratios of a .(iii) In case if it is given that l, m, n are direction cosines of a vector, then liˆ mjˆ nkˆ (cos α)iˆ (cos β) ˆj (cos γ )kˆ is the unit vector in the direction of that vector,where α, β and γ are the angles which the vector makes with x, y and z axesrespectively.rExample 4 Find the values of x, y and z so that the vectors a xiˆ 2 ˆj zkˆ andrb 2iˆ yjˆ kˆ are equal.Solution Note that two vectors are equal if and only if their corresponding componentsrrare equal. Thus, the given vectors a and b will be equal if and only ifx 2, y 2, z 1
436MATHEMATICSrrrrrrExample 5 Let a iˆ 2 ˆj and b 2iˆ ˆj . Is a b ? Are the vectors a and bequal?rrSolution We have a 12 22 5 and b 22 125herrSo, a b . But, the two vectors are not equal since their corresponding componentsare distinct.rExample 6 Find unit vector in the direction of vector a 2iˆ 3 ˆj kˆaˆ 1(2iˆ 3 ˆj kˆ) 2 ˆ3 ˆ1 ˆi j k141414 no NCtt Eo Rbe TrepuTherefore22 32 12 14blr a Nowis1 rrSolution The unit vector in the direction of a vector a is given by aˆ r a . a 14rExample 7 Find a vector in the direction of vector a iˆ 2 ˆj that has magnitude7 units.Solution The unit vector in the direction of the given vector ar is1 r1 ˆ1 ˆ 2 ˆaˆ r a (i 2 ˆj ) i j a 555rTherefore, the vector having magnitude equal to 7 and in the direction of a is7 ˆ 14 ˆ 1 2 i j7a 7 i j 555 5Example 8 Find the unit vector in the direction of the sum of the vectors,rra 2iˆ 2 ˆj – 5kˆ and b 2iˆ ˆj 3kˆ .Solution The sum of the given vectors isr r ra b ( c , say) 4iˆ 3 ˆj 2kˆandr c 42 32 ( 2) 2 29
VECTOR ALGEBRA437Thus, the required unit vector is1 r14 ˆ3 ˆ2 ˆcˆ r c (4iˆ 3 ˆj 2kˆ) i j k c 29292929b1c 2r, n r as r 6m r r r 66 no NCtt Eo Rbe Trepu2 1 1,,–Thus, the direction cosines are .6 6 6bla1,l r r 6isherExample 9 Write the direction ratio’s of the vector a iˆ ˆj 2kˆ and hence calculateits direction cosines.rSolution Note that the direction ratio’s a, b, c of a vector r xiˆ yjˆ zkˆ are justthe respective components x, y and z of the vector. So, for the given vector, we havea 1, b 1 and c –2. Further, if l, m and n are the direction cosines of the givenvector, then10.5.2 Vector joining two pointsIf P1(x1, y1, z1) and P2(x2, y2, z2) are any two points, then the vector joining P1 and P2uuuuris the vector P1P2 (Fig 10.15).Joining the points P1 and P2 with the originO, and applying triangle law, from the triangleOP1P2 , we haveuuuuruuur uuuurOP1 P1P2 OP2 .Using the properties of vector addition, theabove equation becomesuuuur uuuur uuurP1P2 OP2 OP1i.e.uuuurP1P2 ( x2iˆ y2 ˆj z2 kˆ) ( x1iˆ y1 ˆj z1kˆ) ( x2 x1 )iˆ ( y2 y1 ) ˆj ( z2 z1 )kˆuuuurThe magnitude of vector P1P2 is given byuuuurP1P2 ( x2 x1 ) 2 ( y2 y1 ) 2 ( z2 z1 ) 2Fig 10.15
438MATHEMATICSExample 10 Find the vector joining the points P(2, 3, 0) and Q(– 1, – 2, – 4) directedfrom P to Q.Solution Since the vector is to be directed from P to Q, clearly P is the initial pointuuurand Q is the terminal point. So, the required vector joining P and Q is the vector PQ ,10.5.3 Section formulahei.e.uuurPQ ( 1 2)iˆ ( 2 3) ˆj ( 4 0)kˆuuurPQ 3iˆ 5 ˆj 4kˆ.isgiven by no NCtt Eo Rbe TrepubluuuruuurLet P and Q be two points represented by the position vectors OP and OQ , respectively,with respect to the origin O. Then the line segmentjoining the points P and Q may be divided by a thirdpoint, say R, in two ways – internally (Fig 10.16)and externally (Fig 10.17). Here, we intend to finduuurthe position vector OR for the point R with respectto the origin O. We take the two cases one by one.Case I When R divides PQ internally (Fig 10.16).uuuruuuruuurIf R divides PQ such that m RQ n PR ,Fig 10.16uuurwhere m and n are positive scalars, we say that the point R divides PQ internally in theratio of m : n. Now from triangles ORQ and OPR, we haveuuur uuur uuur r rRQ OQ OR b ruuur uuur uuur r rPR OR OP r a ,r rr rTherefore, we havem (b r ) n ( r a ) (Why?)rrmb nar(on simplification)orr m nHence, the position vector of the point R which divides P and Q internally in theratio of m : n is given byrrmb nauuurOR m nand
VECTOR ALGEBRA439Case II When R divides PQ externally (Fig 10.17).We leave it to the reader as an exercise to verifythat the position vector of the point R which dividesthe line segment PQ externally in the ratioPRQRmnis given byhem : n i.e. no NCtt Eo Rbe Trepublisrrmb nauuurFig 10.17OR m nRemark If R is the midpoint of PQ , then m n. And therefore, from Case I, theuuurmidpoint R of PQ , will have its position vector asr ra buuurOR 2uuurrrExample 11 Consider two points P and Q with position vectors OP 3a 2b anduuur r rOQ a b . Find the position vector of a point R which divides the line joining P and Qin the ratio 2:1, (i) internally, and (ii) externally.Solution(i) The position vector of the point R dividing the join of P and Q internally in theratio 2:1 isrr rrr2( a b ) (3a 2b ) 5auuur OR2 13(ii) The position vector of the point R dividing the join of P and Q externally in theratio 2:1 isrr rrr r2( a b ) (3a 2b )uuur 4b aOR 2 1Example 12 Show that the points A(2iˆthe vertices of a right angled triangle.ˆj kˆ), B(iˆ 3 ˆj 5kˆ), C(3iˆ 4 j 4kˆ) areSolution We haveuuuriˆ 2 ˆj 6kˆAB (1 2)iˆ ( 3 1) ˆj ( 5 1)kˆuuurBC (3 1)iˆ ( 4 3) ˆj ( 4 5)kˆ 2iˆ ˆj kˆuuurandCA (2 3)iˆ ( 1 4) ˆj (1 4)kˆ iˆ 3 ˆj 5kˆ
440MATHEMATICSFurther, note thatuuuruuuruuur AB 2 41 6 35 BC 2 CA 2Hence, the triangle is a right angled triangle.heEXERCISE 10.21. Compute the magnitude of the following vectors:rr 1 ˆ 1 ˆ 1 ˆb 2iˆ 7 ˆj 3kˆ; c i j k3332. Write two different vectors having same magnitude.3. Write two different vectors having same direction.blisra iˆ ˆj k ;4. Find the values of x and y so that the vectors 2iˆ 3 ˆj and xiˆ yjˆ are equal. no NCtt Eo Rbe Trepu5. Find the scalar and vector components of the vector with initial point (2, 1) andterminal point (– 5, 7).rrr6. Find the sum of the vectors a iˆ 2 ˆj kˆ, b 2iˆ 4 ˆj 5kˆ and c iˆ 6 ˆj – 7 kˆ .r7. Find the unit vector in the direction of the vector a iˆ ˆj 2kˆ .uuur8. Find the unit vector in the direction of vector PQ, where P and Q are the points(1, 2, 3) and (4, 5, 6), respectively.rr9. For given vectors, a 2iˆ ˆj 2kˆ and b iˆ ˆj kˆ , find the unit vector in ther rdirection of the vector a b .10. Find a vector in the direction of vector 5iˆ ˆj 2kˆ which has magnitude 8 units.11. Show that the vectors 2iˆ 3 ˆj 4kˆ and 4iˆ 6 ˆj 8kˆ are collinear.12. Find the direction cosines of the vector iˆ 2 ˆj 3kˆ .13. Find the direction cosines of the vector joining the points A (1, 2, –3) andB(–1, –2, 1), directed from A to B.14. Show that the vector iˆ ˆj kˆ is equally inclined to the axes OX, OY and OZ.15. Find the position vector of a point R which divides the line joining two points Pand Q whose position vectors are iˆ 2 ˆj kˆ and – iˆ ˆj kˆ respectively, in theratio 2 : 1(i) internally(ii) externally
VECTOR ALGEBRA441ruuur uuur uuurruuur uuur uuurr(C) AB BC CA 0bluuur uuur uuur(B) AB BC AC 0istriangle.18. In triangle ABC (Fig 10.18), which of the following is not true:uuur uuuur uuur r(A) AB BC CA 0he16. Find the position vector of the mid point of the vector joining the points P(2, 3, 4)and Q(4, 1, –2).r17. Show that the points A, B and C with position vectors, a 3iˆ 4 ˆj 4kˆ,rrb 2iˆ ˆj kˆ and c iˆ 3 ˆj 5kˆ , respectively form the vertices of a right angled no NCtt Eo Rbe TrepuFig 10.18(D) AB CB CA 0rr19. If a and b are two collinear vectors, then which of the following are incorrect:rr(A) b λa , for some scalar λrr(B) a brr(C) the respective components of a and b are not proportionalrr(D) both the vectors a and b have same direction, but different magnitudes.10.6 Product of Two VectorsSo far we have studied about addition and subtraction of vectors. An other algebraicoperation which we intend to discuss regarding vectors is their product. We mayrecall that product of two numbers is a number, product of two matrices is again amatrix. But in case of functions, we may multiply them in two ways, namely,multiplication of two functions pointwise and composition of two functions. Similarly,multiplication of two vectors is also defined in two ways, namely, scalar (or dot)product where the result is a scalar, and vector (or cross) product where theresult is a vector. Based upon these two types of products for vectors, they havefound various applications in geometry, mechanics and engineering. In this section,we will discuss these two types of products.10.6.1 Scalar (or dot) product of two vectorsrrr rDefinition 2 The scalar product of two nonzero vectors a and b , denoted by a b , is
442MATHEMATICSr rr ra b a b cos θ ,rrwhere, θ is the angle between a and b , 0(Fig 10.19).rrrrIf either a 0 or b 0, then θ is not defined, and in this case,r rwe define a b 0defined asheFig 10.19 no NCtt Eo Rbe TrepublisObservationsr r1. a b is a real number.rrr rrr2. Let a and b be two nonzero vectors, then a b 0 if and only if a and b areperpendicular to each other. i.e.r rr ra b 0 a br r r r3. If θ 0, then a b a b r r rIn particular, a a a 2 , as θ in this case is 0.r rr r4. If θ π, then a b a b rrrIn particular, a ( a ) a 2 , as θ in this case is π.5. In view of the Observations 2 and 3, for mutually perpendicular unit vectorsiˆ, ˆj and kˆ, we haveiˆ iˆ ˆj ˆj kˆ kˆ 1,iˆ ˆj ˆj kˆ kˆ iˆ0rr6. The angle between two nonzero vectors a and b is given byr rrra b–1 a.b cosr r , or θ cos r r a b a b 7. The scalar product is commutative. i.e.r r r ra b b a(Why?)Two important properties of scalar productr rrProperty 1 (Distributivity of scalar product over addition) Let a, b and c beany three vectors, thenr rr rr r ra (b c ) a b a c
VECTOR ALGEBRA443rrProperty 2 Let a and b be any two vectors, and λ be any scalar. Thenrr rr rrr r(a b ) a ( b )(λ a ) b ( a ) brrIf two vectors a and b are given in component form as a1iˆ a2 ˆj a3 kˆ andheb1iˆ b2 ˆj b3 kˆ , then their scalar product is given asr ra b (a1iˆ a2 ˆj a3 kˆ) (b1iˆ b2 ˆj b3 kˆ)is a1iˆ (b1iˆ b2 ˆj b3 kˆ) a2 ˆj (b1iˆ b2 ˆj b3 kˆ) a3 kˆ (b1iˆ b2 ˆj b3 kˆ) a1b1 (iˆ iˆ) a1b2 (iˆ ˆj ) a1b3 (iˆ kˆ) a2b1 ( ˆj iˆ) a2b2 ( ˆj ˆj ) a2b3 ( ˆj kˆ)bl a3b1 (kˆ iˆ) a3b2 (kˆ ˆj ) a3b3 ( kˆ kˆ) (Using the above Properties 1 and 2) a1 b 1 a 2 b 2 a 3 b 3(Using Observation 5)r ra b a1b1 a2 b2 a3b3 no NCtt Eo Rbe TrepuThus10.6.2 Projection of a vector on a lineuuurSuppose a vector AB makes an angle θ with a given directed line l (say), in theuuurranticlockwise direction (Fig 10.20). Then the projection of AB on l is a vector puuurr(say) with magnitude AB cos θ , and the direction of p being the same (or opposite)rto that of the line l, depending upon whether cos θ is positive or negative. The vector paABBaθlCCp00(0 θ 90 )(i)CpθAθlCaaB00(180 θ 270 )(iii)AFig 10.20lp00(90 θ 180 )(ii)pAθB(2700 θ 3600)(iv)l
444MATHEMATICSris called the projection vector, and its magnitude p is simply called as the projectionuuurof the vector AB on the directed line l.For example, in each of the following figures (Fig 10.20 (i) to (iv)), projection vectoruuuruuurheof AB along the line l is vector AC .Observations no NCtt Eo Rbe Trepublisr1. If p̂ is the unit vector along a line l, then the projection of a vector a on the linerl is given by a pˆ .rr2. Projection of a vector a on other vector b , is given byr1 r rr b r ˆa b, or a r , or r (a b ) b b uuuruuur3. If θ 0, then the projection vector of AB will be AB itself and if θ π, then theuuuruuurprojection vector of AB will be BA .uuur3ππ4. If θ or θ , then the projection vector of AB will be zero vector.22rRemark If α, β and γ are the direction angles of vector a a iˆ a ˆj a kˆ , then its1direction cosines may be given asra1a iˆcosr , cosr ˆ a i a a2r , and cos a 23a3r a rrrAlso, note that a cos α, a cosβ and a cosγ are respectively the projections ofrra along OX, OY and OZ. i.e., the scalar components a1, a2 and a3 of the vector a ,rare precisely the projections of a along x-axis, y-axis and z-axis, respectively. Further,rif a is a unit vector, then it may be expressed in terms of its direction cosines asra cos αiˆ cos βˆj cos γkˆrrExample 13 Find the angle between two vectors a and b with magnitudes 1 and 2r rrespectively and when a b 1 .rr rrSolution Given a b 1, a 1 and b 2 . We havecos1r ra br r a b cos1123
VECTOR ALGEBRA445Therefore, we havecosθ herrExample 14 Find angle ‘θ’ between the vectors a iˆ ˆj kˆ and b iˆ ˆj kˆ .rrSolution The angle θ between two vectors a and b is given byr ra brcosθ r a b r rNowa b (iˆ ˆj kˆ) ( iˆ ˆj kˆ) 1 1 1 1 . 13blis11θ cos3rr ˆ ˆˆˆˆExample 15 If a 5i j 3k and b i 3 j 5kˆ , then show that the vectorsr rr ra b and a b are perpendicular.hence the required angle is no NCtt Eo Rbe TrepuSolution We know that two nonzero vectors are perpendicular if their scalar productis zero.r rHerea b (5iˆ ˆj 3kˆ) ( iˆ 3 ˆj 5kˆ) 6iˆ 2 ˆj 8kˆr randa b (5iˆ ˆj 3kˆ) ( iˆ 3 ˆj 5kˆ) 4iˆ 4 ˆj 2kˆr r r r(a b ) (a b ) (6iˆ 2 ˆj 8kˆ) (4iˆ 4 ˆj 2kˆ) 24 8 16 0.Sor rr rHencea b and a b are perpendicular vectors.rExample 16 Find the projection of the vector a 2iˆ 3 ˆj 2kˆ on the vectorrb iˆ 2 ˆj kˆ .rrSolution The projection of vector a on the vector b is given by(2 1 3 2 2 1) 10 51 r r 6r (a b ) 6 3 b (1) 2 (2) 2 (1
VECTOR ALGEBRA 429 10.4 Addition of Vectors A vector AB uuur simply means the displacement from a point A to the point B. Now consider a situation that a girl moves from A to B and then from B to C (Fig 10.7). The net displacement made by the girl from point A to the point C, is given by the vector AC uuur and expressed as AC uuur AB BC uuur .