Transcription
Drones Demystified!K. Alexis, C. Papachristos, Autonomous Robots Lab, University of Nevada, RenoA. Tzes, Autonomous Robots & Intelligent Systems Lab, NYU Abu Dhabi
Drones Demystified!Topic: Introduction
Course Goals Be approachable and accessible for all. Develop a broad understanding on how aerialrobots fly and operate. Develop the capacity to design navigation andotherautomationandautonomyrobotfunctionalities. Combine theory with intuition and practice. Be able to implement new ideas in practice. Provide the knowledge background and thetools for your further steps in aerial (and not only)robotics.
Course Approach Brief Overview and Focus Sections: Each topic isoverviewed and selected subtopics arethoroughly described. Any Entry Point: Feel free to start the course fromany subsection of interest. Try to go through all ofthem to understand the synergies. Coding Examples: Each focus section isaccompanied with coding examples usingPython, MATLAB and C
Course Contents Introduction: Get a broad understanding about aerial robotics, what theyare, what they look like, what they can do and how they do so. Modeling: Understand the physical principles behind the flight dynamics ofaerial robotics and develop the capacity to derive their mathematicalmodel. State Estimation & Perception: Learn how on-board estimation of thevehicle full pose (position and orientation) takes place. Understandonboard vision and perception in general. Flight Controls: Learn how to design high-performance flight controllers. Motion Planning: Learn how to develop algorithms for autonomous motionplanning for aerial robotics.
Course Material Online Textbook: a brief textbook covering the topics of the course. To becontinuously updated every year. Lecture Slides: Used for the classroom presentations and also as a way fornotes keeping and direct reference to the course contents. Coding Examples: small programs written in Python, MATLAB, and C covering the focus sections of the course. Open-Source Aerial Robots Simulator: a complete simulation environmentfor advanced designs.
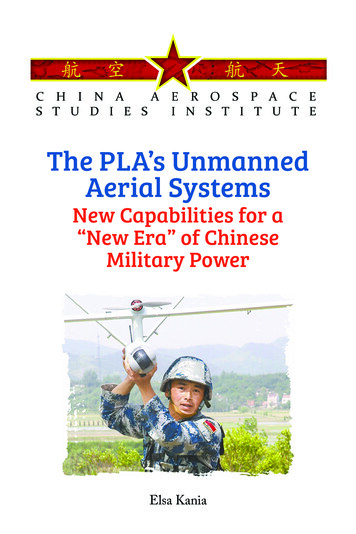
Historical Background of Aerial Robots Unmanned Aerial Vehicles lie on thefoundations set in aircraft design &automatic flight control. First UAVs were based on modifications ofmanned rocket and aircraft designs. Their evolution process has constantlychallenged the limits of technologytowards miniaturization, flight controlagility, perceptual skills, navigationalautonomy, flight endurance or evenunconventional skills such as aerialmanipulation.
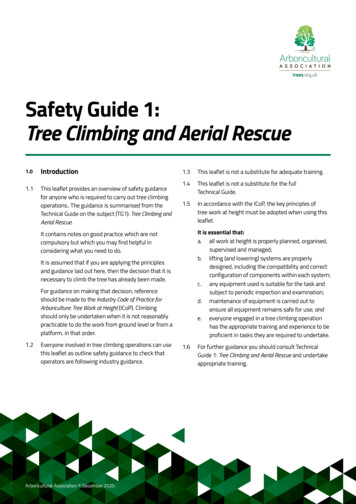
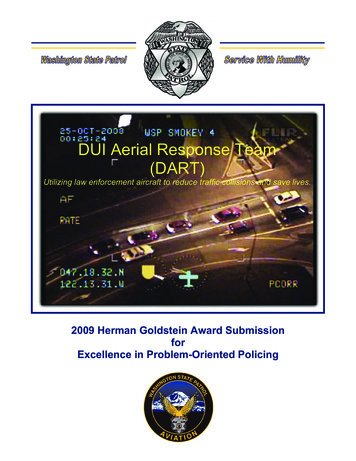
Current Trends in Aerial RoboticsSystem MiniaturizationProlonged EnduranceAscTec Firefly with VI-Sensor,UNRAgile Flight ControlVI-Sensor, ETH ZurichPerception & 3D MappingAutonomous Motion PlanningMulti-Robot SystemsAugmented Human-RobotAtlantikSolar UAV, ETH ZurichOculus Rift, Oculus
Current Trends in Aerial RoboticsRetaining Stability during Propeller FailureConvertible Unmanned Aerial Vehicle
Current Trends in Aerial RoboticsEndurance World Record (81.5 Solar-powered Flight)Aerial Mapping
Current Trends in Aerial RoboticsInformation Gain-based Efficient Exploration and3D mapping of Unknown EnvironmentsLocalizability-aware Autonomous Exploration andMapping
Current Trends in Aerial RoboticsMulti-Modal Localization and MappingGPS-denied navigation
Current Trends in Aerial RoboticsPhysical Interaction ControlInspection through Contact
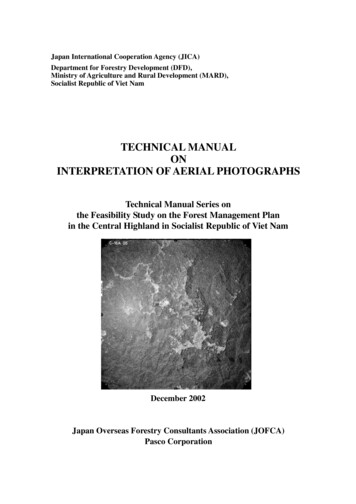
Impact in SocietyGoogle trends “Drones” Indicative Applications: InfrastructureInspectionand Maintenance Humanitarian Assistance Precision Agriculture Climate Control Security and much more! Unmanned Aerial Vehicles(UAV) Market worth 14.9Billion USD by 2020
What are the challenges ahead?No sensible decision can be made any longerwithout taking into account not onlythe world as it is, but the world as it will be. I.A. Can we operate aerial robots withouthaving special skills? a robot may not injure a human being or, throughinaction, allow a human being to come to harm a robot must obey orders given it by human beingsexcept where such orders would conflict with thefirst law a robot must protect its own existence as long assuch protection does not conflict with the first orsecond law Can aerial robots be something more thana flying camera? Can we assign complex tasks toautonomous robots? Can we ensure collision avoidance? Can we trust an aerial robot flying in theurban landscape? In the controllednational airspace?Isaac Asimov
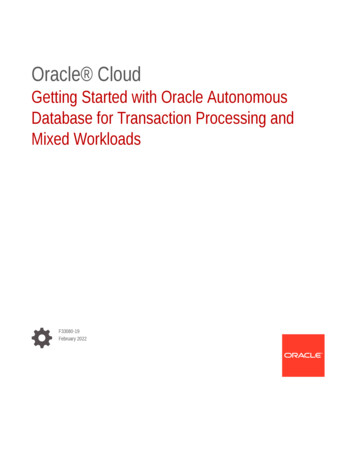
The Aerial Robot LoopBlock diagram of the main loops running at every aerial robot
The Aerial Robot Loop Real-life Aerial Robotexpressing its dynamicbehavior in response tothe control inputs andexternal disturbances
The Aerial Robot Loop Real-life Aerial Robotexpressing its dynamicbehavior in response tothe control inputs andexternal disturbances InertialSystemNavigation Localization & Mapping Sensor Fusion
The Aerial Robot Loop Real-life Aerial Robotexpressing its dynamicbehavior in response tothe control inputs andexternal disturbances Flightcontrolsystemresponsible for ingaswellasdisturbance rejection. InertialSystemNavigation Localization & Mapping Sensor Fusion
The Aerial Robot Loop Path planning in order tocompute the path therobot should follow toensure safe navigation andexecutethedesiredmission. Real-life Aerial Robotexpressing its dynamicbehavior in response tothe control inputs andexternal disturbances Flightcontrolsystemresponsible for ingaswellasdisturbance rejection. InertialSystemNavigation Localization & Mapping Sensor Fusion
The Aerial Robot LoopA hard real-time system with relatively limited computational resources!
The Robot Platform Different aerial vehicle configurations satisfydifferent needs in terms of precision s, payload capacity and more.ETH Zurich Rotorcraft Systems Fixed-Wing SystemsETH Zurich Hybrid Systems Biomimetic SystemsWingTra, ETH Zurich Lighter-than-Air SystemsETH ZurichUT
The Robot Platform Derivation of the Vehicle Dynamics Model: Acomplex mathematic process that heavilydepends on the good understanding of thefollowing topics: Frame Rotations, Representations and CoordinateSystems Rigid Body Dynamics Modeling Derivation of Aerodynamic Forces Modeling is a critical step that enables stateestimation, flight control and prediction of theflight behavior of the vehicle. As part of this course we will derive a first-levelmodel of a multirotor Micro Aerial Vehicle and aFixed-Wing UAV
Perception & State Estimation The process of using data coming from differentsensors on-board in order to estimate (in real-time)the state of the vehicle (position, orientation andpossibly aerodynamic and other high-order states).Typical sensors employed are: Accelerometers Gyroscopes Magnetometer GPS Camera systems LiDAR Structured-light sensors and more It corresponds to fundamental loop for the robotoperation and critical to advance its autonomy.
Perception & State Estimation The sensor data fused to estimate the full state ina bias-free and accurate way in high-updaterates. This process depends on methods of thestate estimation theory. Within this course, we willinvestigate: Inertial sensing The concepts of Kalman Filtering The design of an Inertial Navigation System
Flight Control System The Flight Control System is responsible to ensurethe closed-loop stability of the vehicle andguarantee high performance trajectory trackingdespite possible uncertainty in the . Flight Control System design relies on concepts ofcontrol theory and a precise enough but simplemodel of the vehicle dynamics that allowsmodel-based control. Flight control theory is a huge field and thecommunity has proposed numerous alternativeapproaches towards providing aerial robots withthe desired flying qualities.
Flight Control System Within the framework of this course we willexamine some basic and a few advancedmethods on flight control synthesis. Morespecifically, we will cover the following topics: Proportional Integral Derivative control Linear Quadratic Regulator control Linear Model Predictive Control While, we will then investigate an autopilotdesign example and apply the relevant controlstrategies.
Path Planning Path planning is the process of deriving the paththat the robot should follow in order to ensuresafe navigation and successfully execute itsmission. The problems addressed through therelevant methods include the following: Collision-free Navigation Inspection Path Planning Target Follow Coordinated Motion Collaborative Aerial Manipulation It corresponds to a critical topic to advance theaerial robotics autonomy.
Path Planning Path planning is a rich field and several differentapproaches have been proposed such assampling-based methods or algorithms relying onconvex optimization strategies. Within theframework of this course we will s in the problems of: Collision-free Navigation Structural Inspection Path Planning Autonomous Exploration
The Aerial Robot LoopThese Loops Run Simultaneously!
Thank you!Please ask your question!
Introduction: Get a broad understanding about aerial robotics, what they are, what they look like, what they can do and how they do so. Modeling: Understand the physical principles behind the flight dynamics of aeria