Transcription
Design of ShaftsME 423: Machine DesignInstructor: Ramesh Singh1
Introduction Torque and Power Transmission Most of rotary prime movers eithermotors or turbines use shaft to transferthe power Bearings are required for support Shaft failure analysis is criticalME 423: Machine DesignInstructor: Ramesh Singh2
Shaft Design Material Selection (usually steel, unless you have good reasons) Geometric Layout (fit power transmission equipment, gears,pulleys) Failure strength– Static strength– Fatigue strength Shaft deflection––––Bending deflectionTorsional deflectionSlope at bearings and shaft-supported elementsShear deflection due to transverse loading of short shafts Critical speeds at natural frequenciesME 423: Machine DesignInstructor: Ramesh Singh3
Shaft Materials Deflection primarily controlled by geometry, not material Strain controlled by geometry but material has a role in stress Strength, Yield or UTS is a material property. Cold drawn steeltypical for d 3 in. HR steel common for larger sizes. Should be machined allover. Low production quantities: Machining High production quantities: FormingME 423: Machine DesignInstructor: Ramesh Singh4
Shaft Layout Shafts need to accommodatebearings, gears and pulleyswhich should be specified Shaft Layout– Axial layout of components– Supporting axial loads(bearings)– Providing for torquetransmission(gearing/sprockets)– Assembly andDisassembly(repair &adjustment)ME 423: Machine DesignInstructor: Ramesh Singh5
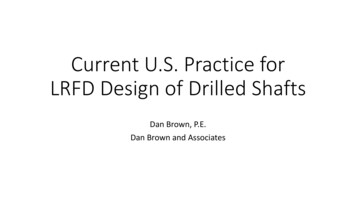
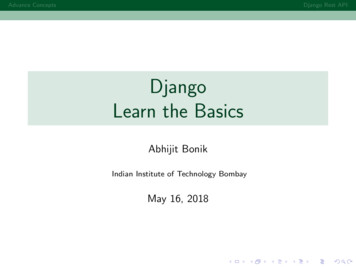
Axial Layout of Components7–2a shaftn to support andwo gears and twoSolution uses anon, three shaftey and keyway, andhousing locates thetheir outer ringsthe thrust loads.an-shaftn. (d) Solution usesngs, a straightt, locating collars,ws for collars, fanan itself. The fanports the sleeve(a)(b)Fan(c)(d)The geometric configuration of a shaft to be designed is often simply a revision ofexisting models in which a limited number of changes must be made. If there is noME 423:MachineDesignexisting design to use as a starter,thenthe determinationof the shaft layout may haveInstructor: Ramesh Singhmany solutions. This problem is illustrated by the two examples of Fig. 7–2. 6InFig. 7–2a a geared countershaft is to be supported by two bearings. In Fig. 7–2c a
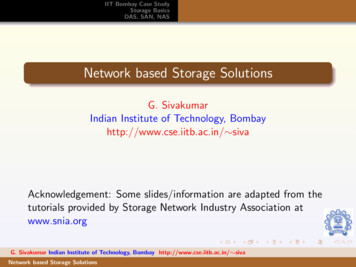
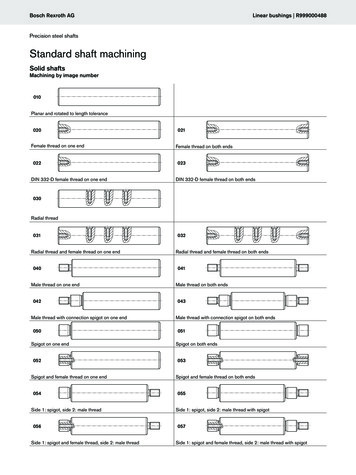
This design represents goodpractice for the situation inwhich one or more torquetransfer elements mustbe mounted outboard.(Source: Redrawn frommaterial furnished by TheTimken Company.)Supporting Axial Load Axial loads must be supported through a bearing to the frame Generally best for only one bearing to carry axial load toshoulderbud29281 ch07 358-408.qxd 12/8/09 12:52PM Page 364 ntt 203:MHDQ196:bud29281:0073529281:bud29281 pagefiles:364Mechanical Engineering DesignFigure 7–3Tapered roller bearings usedin a mowing machine spindle.This design represents goodpractice for the situation inwhich one or more torquetransfer elements mustbe mounted outboard.(Source: Redrawn frommaterial furnished by TheTimken Company.)Figure 7–4A bevel-gear drive inwhich both pinion and gearare straddle-mounted.(Source: Redrawn frommaterial furnished byGleason Machine Division.) PinsFigure 7–4A bevel-gear drive inwhich both pinion and gearare straddle-mounted.(Source: Redrawn frommaterial furnished byGleason Machine Division.) Press or shrink fits Tapered fitsME 423: Machine DesignInstructor: Ramesh SinghIn addition to transmitting the torque, many of these devicthe torque exceeds acceptable operating limits, protecting moreDetails regarding hardware components such as keys, paddressed in detail in Sec. 7–7. One of the most effective antransmitting moderate to high levels of torque is througha key7the shaft and gear. Keyed components generally have a slip fit o
Torque Transmission Common means of transferring torque to ss or shrink fitsTapered fits Keys are one of the most effective – Slip fit of component onto shaft for easy assembly– Positive angular orientation of component– Can design the key to be weakest link to fail in case of overloadME 423: Machine DesignInstructor: Ramesh Singh8
Shaft Design for Stresses Stresses are only evaluated at critical location Critical locations are usually––––On the outer surfaceWhere the bending moment is largeWhere the torque is presentWhere stress concentrations existME 423: Machine DesignInstructor: Ramesh Singh9
Bending, torsion, and axial stresses may be present in both midrange and alternatinging magnitudes.components. For analysis, it is simple enough to combine the different types of stressesintoalternating and midrange von Mises stresses, as shown in Sec. 6–14, p. 317.ShaftStressesIt is sometimes convenient to customize the equations specifically for shaft applicaBending,and areaxialstressesmay be presentin bothmidrangeand alternatingtions.torsion,Axial loadsusuallycomparativelyvery smallat criticallocationswherecomponents.For torsionanalysis,it is types ofThestressesbending anddominate,so theywill betoleftout of theStandardequationscancustomizedforshaftsinto alternatingand stressmidrangevon andMisesstresses,as6–14,p. 317.fluctuatingstressesdue to bendingtorsionare begivenbyshown in Sec.Shaft StressesIt is sometimes convenient to customize the equations specifically for shaft applica Axial loads are σgenerallyonlybending and(7–1)torsionMa c small so MmcKfσmvery K fsmall at critical locationstions. Axial loads are usuallycomparativelywherea IIbending beand consideredtorsion dominate, so they will be left out of the following equations. TheTa cTm cfluctuating stresses due to bendingτ Kand torsionτ are Kgiven by(7–2)will Standard alternatingstresses can be calculatedaf s and midrangemfsJJMa cMm cσ Kσ Ka midrangefmfwhere Mm and Ma are theand alternatingbendingmoments, Tm and Ta are(7–1)IIthe midrange and alternating torques, and K f and K f s are the fatigue stress-concentrationfactors for bending and torsion, respectively.Ta cTm cτ Kτ Ka withf sround cross section,mfappropriatesAssuming a solid shaftgeometry terms can(7–2)JJbe introduced for c, I, and J resulting inwhere Mm and Ma are the midrangeand alternating bendingmoments, Tm and Ta are32Ma32Mmσm (7–3)K andK fKs fare thethe midrange and alternatingσtorques,fatigue stress-concentrationa K f andπd 3 fπd 3factors for bending and torsion, respectively.16Tacross section, 16TmAssuming a solid shaftτwithroundappropriategeometry terms Kτ K(7–4) canafsmfs33πdbe introduced for c, I, and J resultingπdinσa K f32Maπd 316T32MmME423:σm MachineK f Design3Instructor: RameshπdSingh16T(7–3)10
Design StressesCombining these stresses in accordance with the distortion energy failure theovon Misesstresses vonMisesfor rotatinground, solid shafts, neglecting axial loads,CalculatingStressesn by!"#2"#2 1/232K f Ma16K f s Ta′22 1/2σa (σa 3τa ) 3(733πdπd!"#2"#2 1/232K f Mm16K f s Tm′22 1/2σm (σm 3τm ) 3(733πdπde that the stress-concentration factors are sometimes considered optional forrange components with ductile materials, because of the capacity of the ducerial to yield locally at the discontinuity.These equivalent alternating and midrange stresses can be evaluated usingropriate failure curve on the modifiedMEGoodmandiagram (See Sec. 6–12, p. 303, a423: Machine DesignInstructor:criteriaRamesh Singh6–27). For example, the fatigue failurefor the modified Goodmanline11ressed previously in Eq. (6–46) is
Shaft StressesShaft StressesSubstitute von Mises stresses into failure criteria equation.example,modifiedGoodmanline,Substitute vonMises usingstressesinto failurecriteriaequation. ForModified GoodmanusingvonMisesmodifiedintoGoodman example,Substitutingfailure line,criterionfor d is convenient for design purposes Solving forSolvingdiameterSolving for d is convenient for design purposesME 423: Machine DesignInstructor: Ramesh SinghShigley’s Mechanical E12
Design of shafts Similar approach can be taken with any of the fatigue failurecriteria Equations are referred to by referencing both the DistortionEnergy method of combining stresses and the fatigue failurelocus name. For example, DE-Goodman, DE-Gerber, etc. In analysis situation, can either use these customizedequations for factor of safety, or can use standard approachfrom Ch. 6. In design situation, customized equations for d are muchmore convenient.ME 423: Machine DesignInstructor: Ramesh Singh13
Shaft StressesGerberDE-GerberwhereME 423: Machine DesignInstructor: Ramesh Singh14
whereOther CriteriaDE-ASMEEllipticDE-ASMEElliptic ASMEElliptic %116 4nπd 3/A 4(K f Ma ) 2 3(K f s Ta ) 2/ShaftStressesB 4(K f Mm ) 2 3(K f s Tm ) 2K f MaSe&2 3%K f s TaSe&2 4%K f MmSy&2 3%K f s TmSy&2 '1/2(7–11) %&2%&2%&2%&2 '1/2 1/3 16nK f MaK f s TaK f MmK f s Tmd 4 3 4 3 π SeSeSySy(7–12)DE-Soderberg DESoderbergDE-Soderberg 0116 nπd 321/221/21 11 14(K f Ma )2 3(K f s Ta )2 4(K f Mm )2 3(K f s Tm )2SeSyt3(7–13)d %16nπ021/21 14(K f Ma )2 3(K f s Ta )2Se3&1/321 122 1/2 4(K f Mm ) 3(K f s Tm )Syt(7–14)Shigley’s Mechanical Engineering DesignME 423:bendingMachineandDesignFor a rotating shaft with constanttorsion, the bending stress is comInstructor:RameshSinghpletely reversed and the torsion is steady. Equations (7–7) through (7–14) can be simplified by setting Mm and Ta equal to 0, which simply drops out some of the terms.15
Rotating Shaft For rotating shaft with steady, alternating bendingand torsion– Bending stress is completely reversed (alternating), since astress element on the surface cycles from equal tension tocompression during each rotation– Torsional stress is steady (constant or static)– Previous equations simplify with Mm and Ta equal to 0ME 423: Machine DesignInstructor: Ramesh Singh16
YieldingCheckingCheckfor Yielding in Shafts Always necessary to consider static failure, even in fatigueAlways necessary to consider static failure, even in fatiguesituationsituation Soderberg criteriainherently guards against yieldingSoderberg criteria inherently guards against yielding ASME-Elliptic criteriatakes yieldinginto account,butis notbut is notASME-Ellipticcriteria takesyielding intoaccount,entirely conservativeentirely conservativeGerberGoodmanand modifiedGoodmancriteriaspecificrequire specific Gerber and modifiedcriteriarequirecheck checkyieldingfor yieldingShigley’s Mechanical EngineME 423: Machine DesignInstructor: Ramesh Singh17
YieldCheckCheckingfor Yielding in ShaftsvonmaximumMises maximumtoforcheckfor yielding, Use vonUseMisesstress tostresscheckyielding,Alternate simple check is to obtain conservative estimate of s'm Alternatecheckis tosobtainconservative estimate ofby simplesummings'a and'ms'max by summings maxsa smME 423: Machine DesignInstructor: Ramesh Singh18
Deflection Considerationsbud29281 ch07 358-408.qxd 12/9/09 4:29PM Page 379 ntt 203:MHDQ196:bud29281:0073529281:bud29281 pagefiles: Deflection analysis requires complete geometry & loadinginformation for the entire shaft Allowable deflections at components will depend on theShafts and Shaft Componencomponent manufacturer’s specifications.Table 7–2SlopesTypical MaximumRanges for Slopes andTransverse DeflectionsTapered roller0.0005–0.0012 radCylindrical roller0.0008–0.0012 radDeep-groove ball0.001–0.003 radSpherical ball0.026–0.052 radSelf-align ball0.026–0.052 radUncrowned spur gear 0.0005 radTransverse DeflectionsSpur gears with P 10 teeth/in0.010 inSpur gears with 11 P 190.005 inSpur gears with 20 P 500.003 inME 423: Machine DesignInstructor: Ramesh Singh7–5Deflection Considerations19
Determination of deflections Linear & angular deflections, should be checked at gears andbearings Deflection analysis is straightforward, but very lengthy andtedious to carry out manually. Consequently, shaft deflectionanalysis is almost always done with the assistance ofsoftware(usually FEA) For this reason, a common approach is to size critical locationsfor stress, then fill in reasonable size estimates for otherlocations, then check deflection using FEA or other software Software options include specialized shaft software, generalbeam deflection software, and finite element analysis (FEA)software.ME 423: Machine DesignInstructor: Ramesh Singh20
Critical Speeds For a rotating shaft if the centripetal force is equal to theelastic restoring force, the deflection increases greatly and theshaft is said to "whirl” Below and above this speed this effect is not pronounced This critical (whirling speed) is dependent on:– The shaft dimensions– The shaft material and– The shaft loadsME 423: Machine DesignInstructor: Ramesh Singh21
Critical speeds of shaftsForce balance of restoring force and centripetal,!"# & k is the stiffness of the transverse vibration" 2 678 &!The critical speed for a point mass of m,1 &78 26 !For a horizontal shaft,78 1 :26 Where y the static deflection at the location of the concentrated massME 423: Machine DesignInstructor: Ramesh Singh22
# 2πω1 l# 2EIπ mlgE IAγ(7–22Ensembleoflumpedmassesmass per unit length, A the cross-sectional area, and γ the s gives Forofensembleof lumpedmassesmethodRaleigh’sformethodpf lumped& !masses gives,g wi yiω1 !(7–232wi yiweight of the ith location and yi is the deflection at the ith body location wherewi foris theof thelocationyi is the the shaft intuse Eq.(7–23)theweightcase ofEq. ith(7–22)byandpartitioningdeflectionthe ithatbodylacing itsweightatforcethe locationsegment centroid as seen in Fig. 7–12xME 423: Machine DesignInstructor: Ramesh Singh23
Beam Theorym Mass (kg)Nc critical speed (rev/s )g acceleration due to gravity (m.s-2 )O centroid locationG Centre of Gravity locationL Length of shaftE Young's Modulus (N/m2)I Second Moment of Area (m4)y deflection from δ with shaft rotation ω δ staticdeflection (m) ω angular velocity of shaft (rads/s) ME 423: Machine DesignInstructor: Ramesh Singh24
Whirling Speed The centrifugal force on the shaft m ω 2(y e) and theinward pull exerted by the shaft, F y48EI / L3 for simplysupported. For a general beam F y K EI / L3where K is constant depending on the loading and the endsupport conditionsME 423: Machine DesignInstructor: Ramesh Singh25
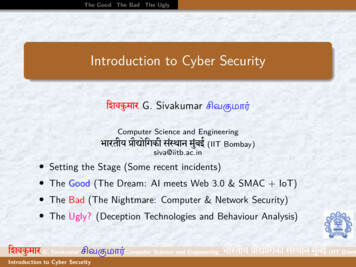
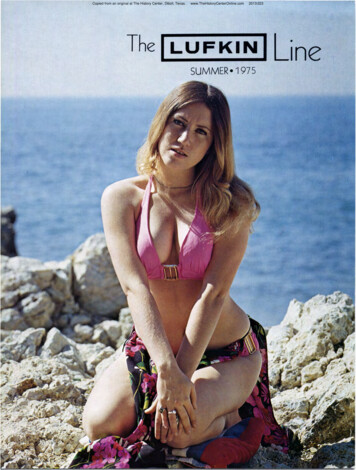
with a central mass K 48 . See examples belowCritical Speed3in the above equation for y results in the following equationcity with the deflection. The critical speed is given byThis curve shows the deflection of the shaft (from the static deflection position) at any speed ω interms of the critical speed.ME 423: Machine DesignInstructor: Ramesh SinghWhen ω ωc the deflection y and e have the same sign that is G lies outside of O. When ω26 ωcthen y and e are of opposite signs and G lies between the centre of the rotating shaft and the static
eflection curve. At high speed G will move such that it tends to coincide with the staticeflection curve.Critical speeds of some configurationsCantilever rotating massMass of shaft neglectedCentral rotating mass- Long BearingsMass of shaft neglectedCentral rotating mass - Short BearingsMass of shaft neglectedME 423: Machine DesignInstructor: Ramesh Singh27
Mass of shaft neglectedNon-Central rotating mass - Short BearingsMass of shaft neglectedCantilevered ShaftME 423: Machine DesignInstructor: Ramesh Singh28
Cantilevered ShaftCantilevered Shaftm mass /unit lengthm mass /unit lengthShaft Between short bearingsShaft Between short bearingsm mass /unit lengthm mass /unit lengthME 423: Machine DesignInstructor: Ramesh Singh29
Shaft Between long bearingsm mass /unit lengthCombined loadingThis is known as Dunkerley's method an is based on the theory of superposition.ME 423: Machine DesignInstructor: Ramesh Singh30
m mass /unit lengthDunkerley’s MethodCombined loadingThis is known as Dunkerley's method an is based on the theory of superposition.ME 423: Machine DesignInstructor: Ramesh Singh31
existing design to use as a starter, then the determination of the shaft layout may have many solutions. This problem is illustrated by the two examples of Fig. 7–2. . A free body dia-gram of the shaft will allow the torque at any section to be determined. The torque is often relatively