Transcription
JUNE 2020ISSUE NO. 370Developing an Effective Anti-Drone Systemfor India’s Armed ForcesVivek GopalAbstract The use of drones or Unmanned Aerial Vehicles (UAVs), both for military andcivilian purposes, has increased in India in the past decade. At the same time, counterdrone systems are also being developed to address the threats posed by UAVs. Howeffective are these counter-drone mechanisms? This brief explores this question, and offerssuggestions for India to reduce the growing threat from drones. Any evaluation of theefficacy of anti-drone systems has to be conducted in view of current technologies such asArtificial Intelligence (AI), cognitive Global Positioning System avoidance, and hardwaresandboxing—and such is the aim of this brief.Attribution: Vivek Gopal, “Developing an Effective Anti-Drone System for India’s Armed Forces,” ORF IssueBrief No. 370, June 2020, Observer Research Foundation.Observer Research Foundation (ORF) is a public policy think tank that aims to influence the formulation of policiesfor building a strong and prosperous India. ORF pursues these goals by providing informed analyses and in-depthresearch, and organising events that serve as platforms for stimulating and productive discussions.ISBN: 978-93-90159-32-1 2020 Observer Research Foundation. All rights reserved. No part of this publication may be reproduced, copied, archived, retained or transmitted through print, speech or electronic media without prior written approval from ORF.
Developing an Effective Anti-Drone System for India’s Armed ForcesINTRODUCTIONIn the past several years, India has beenseeing more use of drones—or smallunmanned aerial vehicles (UAVs)—forvarious military and civilian purposes. Theseinclude reconnaissance, imaging, damageassessment, payload delivery (lethal as wellas utilitarian) and as seen recently amidstthe COVID-19 pandemic, for contact-lessdelivery of medicines. The use of drones,however, poses threats to public securityand personal privacy.1 Analysts warn thatas Unmanned Aerial Systems (UAS) becomeless expensive, easier to fly, and moreadaptable for crime, terrorism or militarypurposes, defence forces will increasingly bechallenged by the need to quickly detect andidentify such aircraft.2 The Small UnmannedAircraft System (sUAS) technologies arecontinuously evolving: indeed, customisedsUAS—i.e., UAVs, micro UAVs, anddrones with their controller stations andequipment—can operate without radiofrequency (RF) command and control links,and can use automated target tracking,aside from having obstacle avoidance andsoftware-controlled capabilities.3This brief outlines the significance ofthe various threats posed by the increasinguse of drones. It suggests a roadmap foraddressing such threats. The brief coversthe aspects of detection, identification andlocalisation techniques, as well as jammingand other countering measures. It also looksinto the various existing anti-UAS solutionsalready in the market.2DETECTION, IDENTIFICATION andLOCALISATION TECHNIQUESDrones have low Radar Cross Section(RCS), slow speed and a small size—thesecharacteristics make the task of detectiondifficult, and thereafter, identification andlocalisation even more so. In response,governments and military forces across theworld, including in India have developedvarious approaches to detect these aerialsystems. These methods can broadly beclassified as radar, video/electro-optical (EO),audio/acoustic, and RF-based.Detection TechniquesRadar. Radar is a useful tool for detectionof aircraft. There are various challenges,however. These include a drone’s lowaltitude and velocity of flying, and verysmall radar cross-section (RCS) which makesit extremely difficult to distinguish noise orclutter from the actual target.RCS Study. Analysing the micro-dopplersignature by multi-static radar can helpin accurate drone detection and tracking.4Small drone RCS estimation obtained byoutdoor measurements has been analysedand proved that passive techniques canbe used to detect and track drones.5 Backscattering phenomenon associated withmicro motion has also been studied byscientists.Whereas the total RCS isimportant for target detection, the energybackscattered from rotating parts likepropeller and rotors are crucial for extraction ORF issue brief no. 370 june 2020
Developing an Effective Anti-Drone System for India’s Armed Forcesof useful micro-Doppler signatures.aClassification and Localisation TechniquesMultiple Input Single Output (MISO)Radar Systems. A single antenna is usedfor transmission, whereas four antennae areused for reception. The concept of estimatingthe minimum power requirement that mustbe transmitted to reveal a target with aspecific value of RCS is possible with the radarequation. Drones up to a range of 150 metrescan be detected using this technique.6Audio. Although not a highly effectivesystem in the stand-alone mode due tothe omnipresent background noise whichincreases the complexity of detection andcomputation, it can be used as a system thatcan be superimposed with other detectiontechniques. During the flight of the drone, thesound generated by the rotors can be utilisedin detection, classification and localisationof drones. Algorithms such as MultipleSignal Classification (MUSIC) can be used toestimate the direction of arrival. Tetrahedronacoustic arrays have been used in systemsto find out the direction of arrival usingreceived signal strength and time differenceof arrival method in addition to Kalman filterfor tracking.10, 11Multiple Input Multiple Output (MIMO)Radar Systems. Using MIMO radar systemsfurther increases the probability of detectionof drones and UAVs. It introduces highangular resolution and sensitivity for slowmoving targets and covers a wider area withlesser cost, as compared to conventionalphased array systems. It also exhibitsenhanced discrimination from clutter andphase noise.7Ku–Band (12 to 18 Giga-hertz)Battlefield Radars. Theoretical analysisof the detection probability has been carriedout 8 in addition to the relationship betweensignal to noise ratio as well as small RCS ofdrones. This was based on a study sponsoredby MoD of the Slovak Republic. A 35 Gigahertz Frequency Modulated ContinuousWave (FMCW) drone detection system hasalso been studied, and the results obtainedhave been validated in theory as well aspractice.9aOptical/Video/Infrared (IR). An objectcan be detected based on its appearancefeatures12 and/or its motion features acrossconsecutive frames.13 For drone detection,it is promising to combine both motionfeatures and appearance features—this giveshigher accuracy to the system. A thermalimaging-based enhancement algorithm forIR scanner system has also been proposedby the Military Institute of Technology,Poland.14 Even in conditions of lowvisibility, the IR spectrum can be discernedat considerable distances. However, thereare certain disadvantages with IR systems,including: low spatial resolution, lowDemirev V.,2017, “Drone Detection in Urban Environment – The New Challenge for the Radar Systems Designers”,International Scientific Journal "Security & Future", WEB ISSN 2535-082X, Year 1 Issue 3, pp 114-116. ORF issue brief no. 370 june 20203
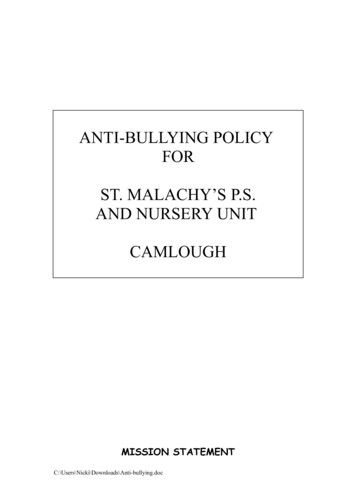
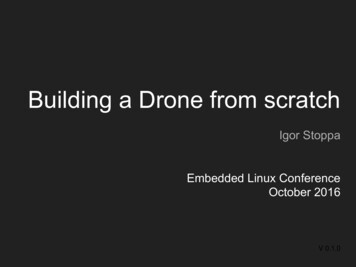
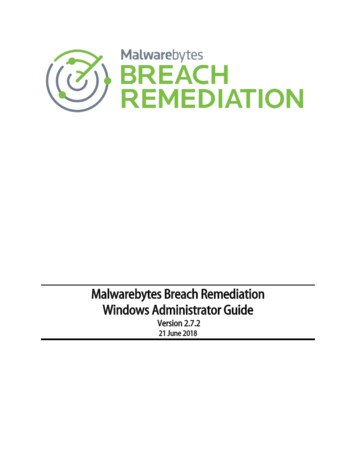
Developing an Effective Anti-Drone System for India’s Armed Forcesimage contrast, diffused edges, presence ofnoise, and pulse disturbances. The InverseSynthetic Aperture Radar (ISAR) techniquehas also been employed during a study inKorea Aerospace Research Institute, forcounter UAS systems to detect drones inurban areas. The detailed structure, size ofthe drone and the number of rotors can alsobe determined using this technique of ISARas demonstrated in the study.15Micro-Doppler Analysis. The microdoppler signature depends on parts of anobject moving and rotating in addition to themain body motion (e.g. rotor blades) and is acharacteristic of the type of object. Researchhas been centred around understanding themicro-doppler spectra of specific commercialdrones whose rotor blades or hubs areuniformly displaced from the platformcentre of mass. When superimposed withradars in the X-Band (7-11 Giga-hertz) andKu-Band, there is higher accuracy due to thefusion of the radar sensor data as comparedto a single radar.16,17 The cepstrum reveals,using signal processing techniques, howthe received signals can be used for imagerecognition. As shown in Figure 1, the studycarried out at Fraunhofer Institute for HighFrequency Physics and Radar Techniques(FHR), Germany, micro-Doppler analysiswhen used in conjunction with radar data,provides good results when determiningthe rotational speed of the rotors. Theindividual rotor speeds can subsequentlybe read from the cepstrogram or thecepstrum. The accompanying graph showsthe cepstrum of the four rotor blades of adrone flight. Due to the flight movementof the drone, two of the blades are rotatingfaster, therefore the higher rotations perminute. Principal Component Analysis(PCA) is another method used to reduce thenumber of variables in data by extractingimportant ones from a large pool. It reducesthe dimension (size) of the data with theaim of retaining as much information aspossible. The PCA technique has been usedfor feature extraction from time-frequencyspectrograms in addition to support vectormachines (supervised machine learningalgorithms) to recognise the drones.Fig.1- Micro-doppler Radar DroMiAn (Drone detection with micro-Doppler Analysis) (Left)& Cepstrum of Four Rotor Blades (Right)(Image Source: https:// www.fhr.fraunhofer.de/en/ businessunits/security/ Drone detection with micro-doppler analysis.html)4 ORF issue brief no. 370 june 2020
Developing an Effective Anti-Drone System for India’s Armed ForcesJAMMING and COUNTERINGTECHNIQUESDefeating a drone can involve a plethora oftechniques. To name a few, it may involvekinetic means, electronic warfare (EW) andcyber warfare (CW) techniques, Drone vsdrone, and Directed Energy Weapons (DEW)using high-powered microwave or LASERs.Various integrated solutions have beenoffered in the world market with respect todefeating drones or sUAS. The noteworthyoptions include RF jamming, GPS jamming,GPS spoofing, and net guns.18 While jammingthe controller link is an option, the widelyused concept involves jamming the GPSlink (bands L1 to L5) to make the dronelose control of its “auto-home” option whenthe main controller link fails (i.e., jammed).One can also develop techniques to jam thepayload WiFi link which will also be in almostthe same frequency range as the 5 Giga-hertzcontroller link (HP 47 counter UAV Jammerdoes exactly this by blocking the video feeds).A layered approach is what will be preferablein a counter-drone system.Boeing demonstrated the High EnergyLaser Mobile Demonstrator in 2014, whichfired a 10-Kilowatt LASER and could functioneffectively in different climatic conditionslike rain, fog or wind. The Drone CatcherGun is also a scalable option available tosafeguard facilities as has been researchedand demonstrated.19 The jamming of dronescan also be effected using a 3D MIMO radar.20By using directional antennae, the power isconfined spatially, thereby allowing its usewithout interference to co-located RF devices/equipment. ORF issue brief no. 370 june 2020The two most potent and comprehensiverepositories of counter-UAS have beenstudied as part of preparing this brief.21, 22The resulting database as part of theaforementioned repositories is based onopen-source research of technical and policyreports, news analyses, manufacturers’information, interviews with governmentofficials, subject matter experts, andparticipation in conferences. The sheervolume as well as the description of thecounter UAS weapons prohibits its inclusionin this brief.The database consists of nearly 537systems, sold by 277 vendors and fielded by38 different countries, some alone and othersas part of joint ventures between two nations.RF & radar detection have been found tobe the most common detection techniques,followed by EO/IR systems. Jamming theRF and GNSS signals is the most commonmethod, followed by a few which havespoofing capability. Some also mention theuse of a ‘sacrificial drone’, or a drone thatmay be used to deliberately collide with thedetected enemy drone to destroy it.ARCHITECTURE andIMPLEMENTATIONOf the 537 systems discussed earlier in thisbrief, unfortunately, none of the systems fromIndia find a mention. This may be becauseinformation may be classified, or there wasno participation by Indian vendors. However,during the Republic Day parade in 2020, therewere media reports of an anti-drone weaponhaving been fielded.23 Based on the variousproof of concepts as well as technology5
Developing an Effective Anti-Drone System for India’s Armed Forcesdemonstrators, one can now elaborate on thesystem design for a modular counter-droneweapon. The main purpose of these measuresis to exploit the vulnerabilities of drones.24Heterogenous Sensing Unit – Detection,Localisation and TrackingA heterogenous sensing unit will serve thepurpose of detection and localisation ofthe drone. The heterogenous system willcomprise of various sensors which can beutilised in any weather. There should beRF/ radar-based sensors as the first line ofdetection, coupled with acoustic sensors.This can be followed by an EO/IR systemlayer for enhancing the resolution. The rangeof detection should be a minimum of threekm and it should effectively be able to trackthe drone at minimum 1 km, assuming thedrone is carrying a destructive payload.In the case of the RF features to beextracted, it may be assumed that at leasttwo out of the following three links are activeat any given point in time, viz., controllerlink or the ground control link (to includeall frequency bands as prevalent based onthe manufacturer specifications); GPS link(uplink & downlink frequency bands asalso to cover GLONASS, Bediou & possiblyIRNSS); and the payload (assumed camera/optical device for reconnaissance) WiFi linkback to the ground control station whichmay transmit the data captured in real timeto the control station. The developmentand incorporation of neural networks canbe considered subsequently. By using thelogical ‘OR’ operation, it will be ensured thatprobabilities of detection are high despitethe possibility of a false alarm, albeit to aminimum.Jamming UnitCentral Processing UnitThe Central Processing Unit should be ableto collate the feed from all the active andpassive sensors. It should thereafter carry outanalysis, derive drone features, and achieveclassification.For the acoustic sensors, the Short TimeFourier Transform (STFT) can be adoptedand the histogram of oriented gradients(HOG) can be used 25 for extraction of imagefeatures. These are in addition to the PCAmethods described earlier.Based on the inputs and analysis carried outby the Central Processing Unit, the jammingunit can be made to work in three modes akinto air defence systems viz., Weapon Hold,Weapon Free, and Weapon Tight. Based ondirectional antennae to achieve better spatialeconomy as well as meet power requirements,a 360-degree coverage is preferable (gimbalbbased for added stabilisation) with a slavedser vo/propor tional-integral-derivative(feedback based) controller to the tracker.A spoofing unit should be made alongsidethe jamming unit to take over the drone ifbThe word “gimbal” is defined as a pivoted support that allows rotation of any object in a single axis. So a threeaxis gimbal allows any object mounted on the gimbal to be independent of the movement of the one holding thegimbal. The gimbal dictates the movement of the object, not the one carrying it.6ORF issue brief no. 370 june 2020
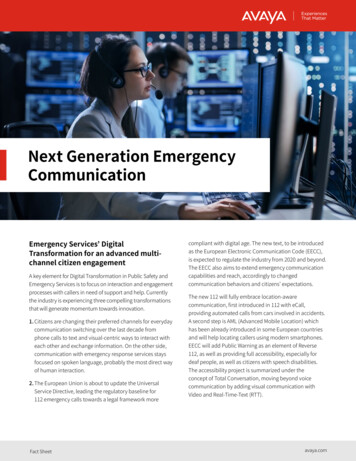
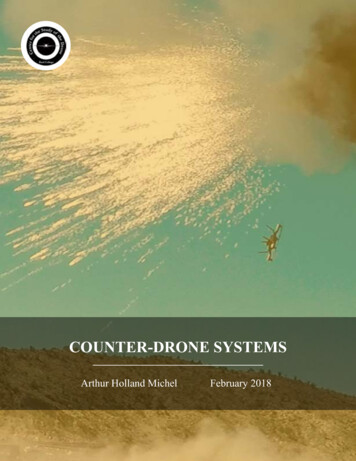
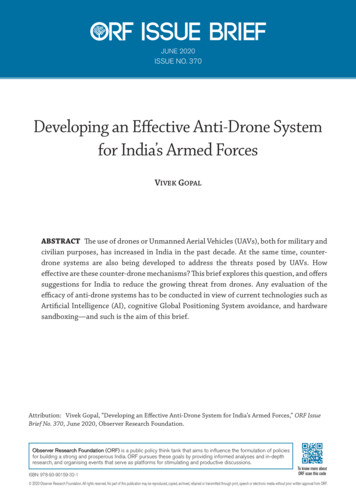
Developing an Effective Anti-Drone System for India’s Armed Forcesdesired for forensics at a later stage (Man inthe middle attackc).by naval vessels the world over against hostilemissiles is also another option which may beexplored.Kill UnitSystem Integration and ImplementationIf the jamming unit is unable to affect thedrone operations due to any reason, the highpower microwave unit should kick into actionto get the drone on the ground. The rangeof engagement can be fixed with respect tovarious vulnerability aspects, such as theinstallation being defended, the importanceof the area, and the vital point. An alternatehigh-power LASER may also be employedto destroy the drone. The close-in weaponsupport systems (CIWSS) as used extensivelyThe proposed system should be fabricatedin a modular fashion allowing sub-systemintegration based on the felt need. Thesystem at the same time should be made intwo versions, viz., manpack (portable) andvehicle-based, obviously scaling down theparts and therefore, weight for the manpacksystem (SWaP considerations). The design ofthe system may be adapted from the systemas shown in Figure 2.Fig. 2 Envisioned Counter Drone System – Layered ArchitectureAuthor's own.cA man in the middle (MITM) attack is a general term for when a perpetrator positions himself in a conversationbetween a user and an application—either to eavesdrop or to impersonate one of the parties, making it appearas if a normal exchange of information is underway. A spoofed signal in the case of a drone will impersonate theactual signal of interest and misguide it. ORF issue brief no. 370 june 20207
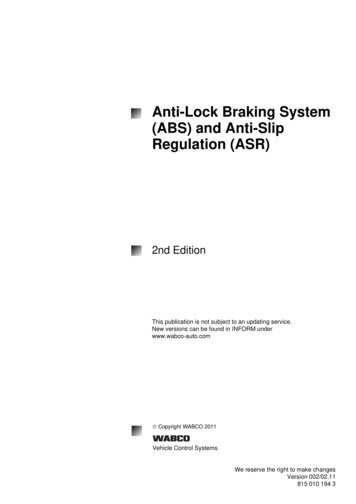
Developing an Effective Anti-Drone System for India’s Armed ForcesWhile the system as envisionedin this brief has been trial-evaluated,stakeholders in the anti-UAS campaignsuch as Rafael (Israel-based) have come upwith the Drone-DomeTM drone detection,neutralisation and interception systemas well as the Firefly TM miniature tacticalloitering weapon.dFig. 3- Drone Dome Brochure (Open Source) – Array of sensors and integrationFig. 4- Firefly Brochure (Open Source) – Tactical loitering weapon to ‘Kill’ Drones(Image Credit: 3/FIREFLY.pdf)dA miniature EO tactical loitering munition which serves as ears and eyes for behind cover/ beyond line of sight.This capability as seen, may be exploited against drones also using its stand-off range as well as enhanced cameracapability.8ORF issue brief no. 370 june 2020
Developing an Effective Anti-Drone System for India’s Armed ForcesWhile the man-portable systems shouldbe capable of being used by the dismountedsoldier or the infantry, the vehicle-basedsystem may be utilised to guard staticinstallations. It is recommended that beinga tri-service requirement, the fabricatingprocess be undertaken under the aegis of theHQ Integrated Defence Staff or a prototypebe developed as an Army Technology Boardproject. What must also be noted is thatcollaboration (internal civil industry as wellas global players) in this field will reap greaterdividends rather than a purely ‘Make in India’approach which may take more time.Under the gambit of the draft DPP 2020,the innovation scheme under the ‘Make’category/ Innovation in Defence Excellence(iDEX)/ Technology Development Fundinitiatives may help in the long run. DGCAwill need to be incorporated to streamlinethe rules of engagement (Civil AviationRequirements or CAR). Such ‘Aerial ThreatReduction Teams (ATRT)’ should be a triservices unit or outfit, with a participationby personnel from all three services, foreffective and efficient utilisation.CHALLENGESThis threat is evolving every three to six months– it is just that adaptive. This is going to be acontinuing challenge due to the adaptive natureof the problem of being able to use small dronesin so many different ways and you cannot relyon one technique to respond to them.- Vayl S. Oxford, Director, U.S. Defence ThreatReduction Agency, March 2019. ORF issue brief no. 370 june 2020The challenges being faced today withrespect to counter-drone technologyis manifold as drone technology isitself growing by leaps and bounds.Reconnaissance, Intelligence, Surveillance& Target Acquisition (RISTA) & ElectronicWarfare systems will have to work togetherto tackle the threat of both stand-aloneand drone swarms. Some of the pertinenttechnological challenges are being highlightedwhich will need immediate attention to beconsidered when the anti-drone weapon isconceptualised.Heterogenous Sensor Fusion. The varietyof protocols used for communicationbetween sensors poses a problem duringtheir integration into a networked system.EnergyEfficientSensors.Powermanagement considerations will alwaysbe towering as the employment of suchsystems is going to be all-day and all-night.Solar power sources and fuel cells are thetechnologies which may be tapped.MultipleDroneDetectionandLocalisation. Technical challenges willbe compounded when trying to detectand localise swarms wherein it will not benecessary that all the drones are having aviable RF signature. Progress has been madein using millimetre -wave radar as well asmeasuring the turbulence caused by thedrone rotors.9
Developing an Effective Anti-Drone System for India’s Armed ForcesDrone Signature Database. Extensivestudies are to be conducted to have acomprehensivedatabase.Inter-agencycooperation may help mitigate the issuesinvolved.Identification Friend or Foe (IFF). T h eIFF shall always remain challenging with theuse of drones for all unethical purposes bynon-state actors. However, research has beencarried out in this field using a relay dronewith beacon system.26Hardware Sandboxing. With systems inplace to reduce the effectiveness of dronejamming (sandboxing), novel kinetic killmethods will have to be developed.27Prevention Against Jamming (JAMME) Techniques. Jamming is now beingleveraged for drone missions intocompletion.28Cognitive Avoidance in 4th GenerationGPS. GPS systems are becoming increasinglymore interference-proof. Long TermEvolution or LTE may soon be used to operatedrones at theoretically unlimited rangeswithout RF links, i.e., cellular base stationswill provide theoretically unlimited range.29New flight modes that have beenintroduced in UAVs or drones which includeobstacle avoidance using ultrasonic sensors,terrain mapping cameras integrated asSoC, follow me, tapfly, active track andsports mode. Better battery systems havebeen incorporated giving the drone larger10endurance (5230 mAh battery on board theDJI Phantom 4).CONCLUSIONEndless possibilities exist in designing asystem to counter drones which may extendlater to UAVs as well as collaborative swarms.A committee needs to be formulated at theapex level which has stakeholders from thedefence forces in addition to judiciary, theacademia, and industry (to include DefencePublic Sector Undertakings).The anti-drone systems will definitelybe expensive owing to the technologyinvolved. However, costs involved shouldnot thwart the innovations. Better rulesand regulations need to be formulated toregulate the Unmanned Traffic Management(UTM). A future roadmap has already beenlaid out for CAR 2.0.30 There is nothing thatstops India from finally having a drone vsdrone ‘dogfight’ or a swarm-against-swarmtype of architecture. A situation wheredrones are “scrambled” to engage and nullifya threat will no longer be mere material forfiction. Indeed, drones being used as a ‘loyalwingman’ are already under test. Systemslike HyperTechTraxerTM (UK registeredfirm, based in Finland) which use nonlethal weapons as well as swarms to monitorsensitive installations have also been madeavailable in the world market.The strategy to defend space mustbe based on adapting to the need of thespecific environment where the deployment ORF issue brief no. 370 june 2020
Developing an Effective Anti-Drone System for India’s Armed Forcesof the counter-drone system is intended.Integration of various sensors and finallyredundancy for sensors in number is alsoimperative. There is a definite need to alignthe timeframe taxonomy with the prevailingthreat at all levels. Disruptive techniquesthat have been brought out in this briefwill also pave the way for future researchand development of whole some systems tothwart adversarial designs.About the authorLt Col Vivek Gopal is an Instructor at a premier training institute. ORF issue brief no. 370 june 202011
Developing an Effective Anti-Drone System for India’s Armed ForcesENDNOTES1Shi, Xiufang, Chaoqun Yang, Weige Xie, Chao Liang, Zhiguo Shi, and Jiming Chen. 2018. "AntiDrone System With Multiple Surveillance Technologies: Architecture, Implementation, AndChallenges". IEEE Communications Magazine 56 (4): 68-74. doi:10.1109/mcom.2018.1700430.(National Academies of Sciences, Engineering, and Medicine. 2018. Aeronautics 2050:Proceedings of a Workshop – In Brief. 2018)2Haviv, Haim. 2019. "Drone Threat And CUAS Technology: White Paper."3"Counter Unmanned Aircraft System (CUAS) Capability For Battalion – And – BelowOperations:Abbreviated Version Of A Restricted Report". 2020. National Academy of Sciences.Accessed March 18.4Shi, Xiufang, Chaoqun Yang, Weige Xie, Chao Liang, Zhiguo Shi, and Jiming Chen. 2018. "AntiDrone System With Multiple Surveillance Technologies: Architecture, Implementation, AndChallenges". IEEE Communications Magazine 56 (4): 68. doi:10.1109/mcom.2018.1700430.5Rzewuski, S, K Kulpa, P Kopyt, B Salski, K Borowiec, and M Malanowski. 2018. "Drone RCSEstimation Using Simple Experimental Measurement In The WIFI Bands 2018 , 695-698".In 22Nd International Microwave And Radar Conference (MIKON).6Sacco, Giulia, Erika Pittella, Stefano Pisa and Emanuele Piuzzi. “A MISO Radar Systemfor Drone Localization.” 2018 5th IEEE International Workshop on Metrology for AeroSpace(MetroAeroSpace) (2018): 549-553.7Alnuaim, Tareq, Mubashir Alam and Abdulrazaq Aldowesh. “Low-Cost Implementation of aMultiple-Input Multiple-Output Radar Prototype for Drone Detection.” 2019 InternationalSymposium ELMAR (2019): 183-186.8J. Ochodnický, Z. Matousek, M. Babjak and J. Kurty, "Drone detection by Ku-band battlefieldradar," 2017 International Conference on Military Technologies (ICMT), Brno, 2017, pp. 613616, doi: 10.1109/MILTECHS.2017.7988830.9J. Drozdowicz et al., "35 GHz FMCW drone detection system," 2016 17th International RadarSymposium (IRS), Krakow, 2016, pp. 1-4, doi: 10.1109/IRS.2016.7497351.10Chang, Xianyu & Yang, Chaoqun & Wu, Junfeng & Shi, Xiufang & Shi, Zhiguo. (2018). ASurveillance System for Drone Localization and Tracking Using Acoustic Arrays. 10.1109/SAM.2018.8448409.11C. Yang, Z. Wu, X. Chang, X. Shi, J. Wo and Z. Shi, "DOA Estimation Using Amateur DronesHarmonic Acoustic Signals," 2018 IEEE 10th Sensor Array and Multichannel Signal ProcessingWorkshop (SAM), Sheffield, 2018, pp. 587-591, doi: 10.1109/SAM.2018.8448797.12Z. Zhang, Y. Cao, M. Ding, L. Zhuang and W. Yao, "An intruder detection algorithm for visionbased sense and avoid system," 2016 International Conference on Unmanned Aircraft Systems(ICUAS), Arlington, VA, 2016, pp. 550-556, doi: 10.1109/ICUAS.2016.7502521.13Ganti, Sai Ram and Yoohwan Kim. “Implementation of detection and tracking mechanism12 ORF issue brief no. 370 june 2020
Developing an Effective Anti-Drone System for India’s Armed Forcesfor small UAS.” 2016 International Conference on Unmanned Aircraft Systems (ICUAS) (2016):1254-1260.14T. Sosnowski, G. Bieszczad, H. Madura and M. Kastek, "Thermovision system for flying objectsdetection," 2018 Baltic URSI Symposium (URSI), Poznan, 2018, pp. 141-144, doi: 10.23919/URSI.2018.8406757.15K. Lee et al., "Identification of a flying multi-rotor platform by high resolution ISAR throughan experimental analysis," International Conference on Radar Systems (Radar 2017), Belfast,2017, pp. 1-5, doi: 10.1049/cp.2017.0435.16M. A. Govoni, "Micro-Doppler signal decomposition of small commercial drones," 2017IEEE Radar Conference (RadarConf), Seattle, WA, 2017, pp. 0425-0429, doi: 10.1109/RADAR.2017.7944240.17P. Zhang, L. Yang, G. Chen and G. Li, "Classification of drones based on micro-Doppler signatureswith dual-band radar sensors," 2017 Progress in Electromagnetics Research Symposium - Fall(PIERS - FALL), Singapore, 2017, pp. 638-643, doi: 10.1109/PIERS-FALL.2017.8293214.18L3 Technologies. “Countering the drone threat to commercial airports” accessed at https://www.l3-droneguardian.com/white-papers/L3 Technologies Whitepaper-CounteringDrones at Commercial Airports.pdf19Krishna Kumar Karothiya, Abhishek Yadav, Abhyuday Mishra, Ankush, Anshul Gupta,Anshul Katiyar, DRONE CATCHER GUN, GLOBAL JOURNAL FOR RESEARCH ANALYSIS:VOLUME-7, ISSUE-2, FEBRUARY-2018.20T. Multerer et al., "Low-cost jamming system against small drones using a 3D MIMO radarbased tracking," 2017 European Radar Conference (EURAD), Nuremberg, 2017, pp. 299-302,doi: 10.23919/EURAD.2017.8249206.21"Counter-Drone Systems". 2020. Dronecenter.Bard.Edu. e-systems-project/.22Butterworth-Hayes, Philip. 2018. "Unmanned Airspace: The Latest Counter-UAS IndustryDirectory - Free Download". Unmanned Airspace. stry-directory/.232020. ticle?OrgId %203250a44d.24N. M. Rodday, R. d. O. Schmidt and A. Pras, "Exploring security vulnerabilities of unmannedaerial vehicles," NOMS 2016 - 2016 IEEE/IFIP Network Operations and ManagementSymposium, Istanbul, 2016, pp. 993-994, doi: 10.1109/NOMS.2016.7502939.25N. Dalal and B. Triggs, "Histograms of oriented gradients for human detection," 2005 IEEEComputer Society Conference on Computer Vision and Pattern Recognition (CVPR'05), SanDiego, CA, USA, 2005, pp. 886-893 vol. 1, doi: 10.1109/CVPR.2005.177.26Chang, Yunseok. “A Drone IFF and Tracking Algorithm with the Relay Drone and the BeaconSystem.” (2019). ORF issue brief no. 370 june 202013
Developing an Effective Anti-Drone System for India’s Armed Forces27J. Mead, C. Bobda and T. J. Whitaker, "Defeating drone jamming with hardware sandboxing,"2016 IEEE Asian Hardware-Oriented Security and Trust (AsianHOST), Yilan, 2016, pp. 1-6,doi: 10.1109/AsianHOST.2016.7835557.28R. Di Pietro, G. Oligeri and P. Tedeschi, "JAM-ME: Exploiting Jamming to AccomplishDrone Missi
counter UAS systems to detect drones in urban areas. The detailed structure, size of the drone and the number of rotors can also be determined using this technique of ISAR as demonstrated in the study.15 Micro-Doppler Analysis. The micro-doppler signature depends on