Transcription
Filtro analógico pasa bajas desegundo orden con parámetrosvariantes en el tiempoporIng. José Roberto Rodrı́guezFernándezTesis sometida como requisito parcial para obtener el grado deMAESTRO EN CIENCIAS EN LA ESPECIALIDAD DEELECTRÓNICA en el Instituto Nacional de Astrofı́sica, Óptica yElectrónicaFebrero 2012Tonantzintla, PueblaSupervisada por:Dr. Miguel Ángel Gutiérrez de Andac INAOE 2012El autor otorga al INAOE el permiso de reproducir y distribuir copiasen su totalidad o en partes de esta tesis
Filtro analógico pasa bajas de segundoorden con parámetros variantes en eltiempo
ResumenEn este trabajo de tesis, se presenta el diseño de un filtro analógico pasa bajas desegundo orden con parámetros variantes en el tiempo basado en una tecnología CMOSde 0.5µm. Dicho filtro está constituido por dos filtros simples pasa bajas de primer orden con parámetros variantes en el tiempo, los cuales están implementados mediantedos espejos simples de corriente y un par de capacitores. Para obtener el filtro antesmencionado también fue necesario agregar un amplificador, un multiplicador, un lazode retroalimentación, diversos espejos de corriente, así como un bloque encargado degenerar una señal exponencial decreciente. La señal exponencial generada por el bloque anteriormente mencionado es usada para inducir la variación temporal de uno delos parámetros del filtro pasa bajas de segundo orden. Finalmente, la mayoría de circuitos y/o bloques electrónicos empleados en este sistema tanto en sus entradas como ensus salidas manejan señales de corriente.I
AbstractIn this thesis work, the design of a second-order parameter-varying analog low passfilter based on a CMOS technology of 0.5 µm is presented. This filter consists of twofirst-order parameter-varying low pass filters which are implemented by two simple current mirrors and two capacitors. In order to synthesize the previous filter it was alsonecessary to add an amplifier, a multiplier, a negative feedback loop, several currentmirrors as well as a circuit block in charge of generating a decreasing exponential signal. The exponential signal which is generated by the aforementioned block is used toinduce a temporal variation of one of the parameters of the second-order low pass filter.Finally, most of the circuits and/or electronic blocks used in this system use currentsignals in their inputs and their outputs.III
AgradecimientosAl Consejo Nacional de Ciencia y Tecnología (CONACYT) por el apoyoeconómico otorgado a través de la beca para estudios de maestría (No. de Registro:235305). Asimismo, expreso mi agradecimiento por el apoyo económico otorgado através de la beca de investigación del proyecto "Diseño e implementación de filtroscontínuos pasabajos con parámetros variantes en el tiempo" (No. de Registro:CB-2007-84819-Y).Al Instituto Nacional de Astrofísica, Óptica y Electrónica (INAOE) por brindarmeun espacio de formación profesional competitivo y por ampliar mis horizontes.A la Academia de Electrónica del INAOE por su voto de confianza en mi capacidadprofesional y por la oportunidad de obtener el grado de maestría en este Instituto.A mi asesor, Dr. Miguel Ángel Gutíerrez de Anda, por todo su valioso apoyo comoasesor de esta tesis.A mis sinodalesDr. Librado Arturo Sarmiento ReyesDr. José Alejandro Díaz MéndezDr. José Miguel Rocha PérezV
VIA todas aquellas personas a quienes amo y me aman por darle sentido a mi vida,color a mis días y propósito a mis pasos.A todas y cada una de las personas que de una u otra forma contribuyeron en larealización de esta tesis de maestría.A DIOS por concederme una vida tan afortunada.La libertad más que un derecho es una responsabilidad. Quien es libre aprecia labelleza y por lo tanto distingue el bien del mal.José Roberto Rodríguez FernándezEn el mundo moderno, la libertad es lo contrario de la realidad; pero es sin embargosu ideal.Gilbert Keith Chesterton (1874-1936) Escritor británico
DedicatoriasA todos los niños enfermos de cáncer, que su vida es una constante lucha entre lavida y la muerte. A los padres de estos niños, sobre todo a los de bajos recursos económicos por las dolorosas odiseas que a diario deben lidiar.A todos los niños de la calle que son obligados a trabajar y que no tienen la oportunidad de estudiar.A esas personas que en repetidas ocasiones he visto en la calle recolectar botellasde plástico entre las bolsas de basura para poder sustentar a su familia.A ustedes que tratan a los demás con respeto y que fomentan la justicia.VII
Índice riasVIIÍndice de figurasXIIndice de tablasXV1. Introducción11.1. Problemática y últimos avances . . . . . . . . . . . . . . . . . . . . . .11.2. Objetivo de esta tesis . . . . . . . . . . . . . . . . . . . . . . . . . . .21.3. Principales contribuciones de esta tesis . . . . . . . . . . . . . . . . . .21.4. Organización de la tesis . . . . . . . . . . . . . . . . . . . . . . . . . .32. Aspectos generales de los sistemas52.1. Señal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .52.2. Sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .62.3. Clasificación de los sistemas . . . . . . . . . . . . . . . . . . . . . . .72.3.1. Sistemas lineales y no lineales . . . . . . . . . . . . . . . . . .72.3.2. Sistemas con parámetros constantes o invariantes en el tiempo .8IX
ÍNDICE GENERALX2.3.3. Sistemas estáticos y sistemas dinámicos . . . . . . . . . . . . .92.3.4. Otras clasificaciones de los sistemas . . . . . . . . . . . . . . . 102.4. Sistemas configurables . . . . . . . . . . . . . . . . . . . . . . . . . . 102.4.1. Filtros adaptivos . . . . . . . . . . . . . . . . . . . . . . . . . 112.4.2. Sistemas externamente lineales e internamente no lineales (ELTI) 122.4.3. Filtros con parámetros variantes en el tiempo . . . . . . . . . . 123. Teoría de los sistemas con parámetros variantes en tiempo153.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153.2. Sistemas lineales variantes en el tiempo: conceptos básicos . . . . . . . 163.3. Modelos para filtros pasa bajas con parámetros variantes en el tiempo . 213.4. Un modelo simple para un filtro pasa bajas de segundo orden con parámetros variantes en el tiempo . . . . . . . . . . . . . . . . . . . . . . . 244. Diseño del filtro pasa bajas de segundo orden con parámetros variantes enel tiempo294.1. Estructura del sistema del filtro . . . . . . . . . . . . . . . . . . . . . . 294.2. Filtro pasa bajas de segundo orden con parámetros variantes en el tiempo 314.3. Amplificador de corriente G(t) de ganancia variable . . . . . . . . . . . 374.4. Generador de señales exponenciales decrecientes . . . . . . . . . . . . 454.5. Respuesta transitoria del filtro . . . . . . . . . . . . . . . . . . . . . . 585. Conclusiones y trabajo a futuro615.1. Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 615.2. Trabajo a futuro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62Bibliografía63A. Codigos en Hspice para la simulación del funcionamiento del filtro propuesto en esta tesis67
Índice de figuras2.1. Diagrama a bloques de un sistema simple . . . . . . . . . . . . . . . . . . . .72.2. Propiedad de homogeneidad . . . . . . . . . . . . . . . . . . . . . . . . . .72.3. Propiedad de aditividad . . . . . . . . . . . . . . . . . . . . . . . . . . . .82.4. Respuesta de un sistema con parámetros constantes o invariantes en el tiempo . . . .92.5.Clasificación de los sistemas configurables. . . . . . . . . . . . . . . . . . . 113.1. Respuesta de un filtro lineal invariante en el tiempo a una señal con característicaperiódica3.2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16Filtro pasa bajas de cuarto orden con aproximación Butterworth: (a) Respuesta demagnitud en el dominio de la frecuencia, (b) Respuesta a un escalón unitario.3.3. . . . 17Filtro pasa bajas de cuarto orden con aproximación Chebyshev: (a) Respuesta demagnitud en el dominio de la frecuencia, (b) Respuesta a un escalón unitario. Estefiltro posee un rizo en la banda de paso de 3 dB. . . . . . . . . . . . . . . . . 173.4. Filtro pasa bajas de cuarto orden con aproximación Chebyshev inversa: (a) Respuestade magnitud en el dominio de la frecuencia, (b) Respuesta a un escalón unitario. Estefiltro posee una atenuación mínima en la banda de rechazo de 40 dB.3.5. . . . . . . . 18Filtro pasa bajas de cuarto orden con aproximación elíptica: (a) Respuesta de magnitud en el dominio de la frecuencia, (b) Respuesta a un escalón unitario. Este filtroposee un rizo en la banda de paso de 3 dB y una atenuación mínima en la banda derechazo de 40 dB. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.6. Diagrama a bloques del filtro de segundo orden con parametros variantes en tiempo. . 25XI
ÍNDICE DE FIGURASXII4.1. Diagrama a bloques del filtro pasa bajas de segundo orden con parámetros variantesen el tiempo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 304.2. Filtro pasa bajas de segundo con parámetros variantes en el tiempo. . . . . . . . . 314.3. Filtro pasa bajas de primer orden. . . . . . . . . . . . . . . . . . . . . . . . 324.4. Amplificador de corriente inversor de ganancia unitaria y espejo de corriente utilizadopara eliminación de la corriente Ib1 sobre Ix . . . . . . . . . . . . . . . . . . 344.5. Respuesta en frecuencia del filtro pasa bajas de segundo orden con parámetros variantes. 374.6. Respuesta en el dominio del tiempo del filtro pasa bajas de segundo orden con parámetros variantes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 374.7. Circuito amplificador de corriente . . . . . . . . . . . . . . . . . . . . . . . . 384.8. Respuesta en frecuencia del circuito amplificador de corriente. . . . . . . . . . . . 394.9. Respuesta transitoria del circuito amplificador de corriente. . . . . . . . . . . . . 394.10. Circuito multiplicador de corriente. . . . . . . . . . . . . . . . . . . . . . . . 404.11. Respuesta en DC del circuito multiplicador con corrientes de entrada ideales (Iin1 eIin2 ). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 424.12. Respuesta en AC del circuito multiplicador con corrientes de entrada ideales (Iin1 eIin2 ). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 434.13. Respuesta en el dominio del tiempo del circuito multiplicador con corrientes de entrada ideales (Iin1 e Iin2 ). . . . . . . . . . . . . . . . . . . . . . . . . . . 434.14. Polarización y generación de las corrientes de entrada del bloque multiplicador. . . . 444.15. Respuesta en AC del circuito multiplicador con corrientes de entrada (Iin1 e Iin2 )generadas con espejos de corriente. . . . . . . . . . . . . . . . . . . . . . . 454.16. Respuesta en el dominio del tiempo del circuito multiplicador con corrientes de entrada (Iin1 e Iin2 ) generadas con espejos de corriente. . . . . . . . . . . . . . 454.17. Diagrama a bloques de la generación de la señal exponencial decreciente . . . . . . 464.18. Diagrama a bloques del filtro pasa altas. . . . . . . . . . . . . . . . . . . . . . 474.19. Esquema del nano OTA-gma del filtro pasa altas. . . . . . . . . . . . . . . . . . 484.20. Esquema del OTA-gmb del filtro pasa altas. . . . . . . . . . . . . . . . . . . . 504.21. Generación de la corriente de polarización del OTA-gma . . . . . . . . . . . . . . 50
ÍNDICE DE FIGURASXIII4.22. Función de transferencia en DC del OTA-gma . . . . . . . . . . . . . . . . . . . 524.23. Función de transferencia en DC del OTA-gmb . . . . . . . . . . . . . . . . . . . 534.24. Respuesta en frecuencia del filtro pasa altas de primer orden. . . . . . . . . . . . 544.25. Respuesta en el dominio del tiempo del filtro pasa altas de primer orden. . . . . . . 544.26. Circuito rectificador de media onda. . . . . . . . . . . . . . . . . . . . . . . 554.27. Polarización del circuito rectificador. . . . . . . . . . . . . . . . . . . . . . . 564.28. Función de transferencia en DC del circuito rectificador de media onda. . . . . . . . 574.29. Respuesta en el dominio del tiempo del circuito rectificador de media onda para unacorriente de entrada sinusoidal de prueba. . . . . . . . . . . . . . . . . . . . 574.30. Corriente de salida del filtro pasa altas rectificada Iop y corriente exponecial decreciente Iexp . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 584.31. Resultados de simulación de la respuesta transitoria del filtro de segundo orden conparámetros variante en el tiempo. . . . . . . . . . . . . . . . . . . . . . . . 594.32. Diagrama a bloques equivalente del filtro pasa bajas de segundo orden cuando no serealiza variación de sus parámetros. . . . . . . . . . . . . . . . . . . . . . . 60
Indice de tablas4.1. Dimensiones de los transistores del filtro pasa bajas de segundo orden. . . . . . . . 364.2. Dimensiones de los transistores del circuito presentado en la Fig.4.4. . . . . . . . . 364.3. Dimensiones de los transistores del circuito amplificador. . . . . . . . . . . . . . 384.4. Dimensiones de los transistores del circuito multiplicador. . . . . . . . . . . . . . 414.5. Dimensiones de los transistores del circuito de polarización del bloque multiplicador .444.6. Dimensiones de los transistores del OTA-gma . . . . . . . . . . . . . . . . . . . 514.7. Dimensiones de los transistores del circuito empleado para polarizar al OTA-gma . . . 514.8. Dimensiones de los transistores del OTA-gmb . . . . . . . . . . . . . . . . . . . 524.9. Dimensiones de los transistores del bloque rectificador. . . . . . . . . . . . . . . 564.10. Dimensiones de los transistores del circuito de polarización para el circuito rectificador. 564.11. Valor de los parámetros de diseño del filtro pasa bajas de segundo orden con parámetros variantes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 604.12. Indice de desempeño del filtro pasa bajas de segundo orden con parámetros variantes.XV60
Capítulo 1Introducción1.1.Problemática y últimos avancesLos filtros con parámetros variantes en el tiempo son sistemas configurables quese distinguen por tener una respuesta transitoria de corta duración. Dicha respuesta seobtiene a partir de cambios temporales sobre el valor de algunos de sus parámetros ysin alterar su comportamiento en el dominio de la frecuencia.En los últimos años, la investigación en el campo de los filtros con parámetros variantes en el tiempo ha generado un vasto número de publicaciones (por ejemplo, verlas referencias [1–10]). Estos trabajos tratan principalmente sobre las propiedades de laconducta dinámica de este tipo de filtros. Sin embargo, el número de trabajos que presentan la implementación usando circuitos electrónicos de dichos filtros es comparativamente pequeño. Por ejemplo, en [11] se presenta un filtro pasa bajas de primer ordencon parámetros variantes en el tiempo basado en circuitos operando bajo el principiotranslineal dinámico [12] e implementados con transistores BJT. En la referencia [11]también se presenta un filtro de primer orden con parámetros variantes en el tiempo contransistores MOS. Sin embargo, dicho circuito es una estructura muy compleja y de bajo desempeño. En la referencia [13], se presenta un filtro rechaza banda con parámetrosvariantes en el tiempo. Dicho filtro está formado por una red doble T formada por ca1
1.2. Objetivo de esta tesis2pacitores y resistores así como un circuito de retroalimentación implementado a partirde transistores MOS. Sin embargo, debido a que la red doble T necesita componentescon un valor muy preciso que no pueden ser integrados, el circuito no es práctico.1.2.Objetivo de esta tesisComo consecuencia del análisis presentado en la sección anterior, es evidente quela investigación en el área de la implementación de los filtros con parámetros variantesen el tiempo puede verse beneficiada al considerar circuitos implementados con transistores MOS. La tecnología CMOS es bastante atractiva para su exploración por lassiguientes razones:Es relativamente barato fabricar circuitos y sistemas en tecnología CMOS.En tiempos recientes, los transistores MOS han demostrado que pueden ser integrados en procesos que permiten la fabricación de sistemas microelectromecánicos (o MEMS, por las siglas en inglés del término microelectromechanicalsystems) [14, 15].Por tal motivo, el objetivo de esta tesis es explorar las posibilidades de implementación de los filtros con parámetros variantes en el tiempo usando circuitos electrónicoscuyas topologías sean relativamente sencillas y que puedan ser fabricados en una tecnología CMOS estándar. De manera más específica, se diseñará a nivel transistor un filtroanalógico pasa bajas de segundo orden con parámetros variantes en el tiempo utilizandola tecnología ON Semi de 0.5µm.1.3.Principales contribuciones de esta tesisEsta tesis constituye el tercer trabajo realizado en lo que respecta al tema de filtroscon parámetros variantes en el tiempo a base de transistores CMOS. También representa
1. Introducción3el segundo trabajo que presenta la posibilidad de ser integrado en una tecnología CMOSestándar (excepto por los dos capacitores del filtro pasa bajas de segundo orden). Acomparación de los dos trabajos anteriores, el filtro con parámetros variantes en eltiempo presentado en esta ocasión ofrece las siguientes ventajas:Se caracteriza por ser un sistema constituido en su totalidad a base de circuitoselectrónicos con transistores MOS.Presenta topologías de circuitos electrónicos relativamente sencillas.1.4.Organización de la tesisEn el capítulo 2 se realiza una breve introducción acerca de los sistemas, sus propiedades y sus principales clasificaciones. En el capítulo 3 se presenta base teórica quesustenta a los filtros con parámetros variantes en el tiempo. El capítulo 4 correspondeal diseño de cada uno de los bloques que integran al filtro pasa bajas de segundo orden con parámetros variantes en el tiempo. Asimismo, se presentan los resultados desimulación obtenidos en Hspice para cada bloque y del sistema completo que constituye dicho filtro. Finalmente, algunas conclusiones y trabajo a futuro se presentan en elcapítulo 5.
Capítulo 2Aspectos generales de los sistemasEl propósito de este capítulo es hacer una introducción general acerca de las principales clasificaciones de sistemas, así como de sus propiedades más importantes. Esteejercicio ayudará a situar de manera apropiada el tópico a desarrollar en esta tesis en elcontexto de trabajo ya existente. Un sistema puede compartir más de una característicacon un sistema de otra clasificación. Por lo tanto, conocer las características y propiedades de los sistemas nos ayuda a distinguir la diferencia básica que existe entre unsistema y otro.2.1.SeñalAntes de definir qué es un sistema, es imprescindible definir qué es una señal. Unaseñal se puede definir de forma muy general como un conjunto de datos o información.En el ámbito electrónico, una señal suele estar correlacionada a una variable física comopuede ser la temperatura, la velocidad, el ritmo cardiaco, la humedad, etc. Aunqueexiste una amplia variedad de señales, en el contexto electrónico podemos distinguirbásicamente entre señales analógicas y señales digitales. Una señal analógica es aquellacuya amplitud puede (idealmente) tomar un número infinito de valores. Si la amplitudde una señal toma únicamente un número finito de valores (dos, por ejemplo) entonces5
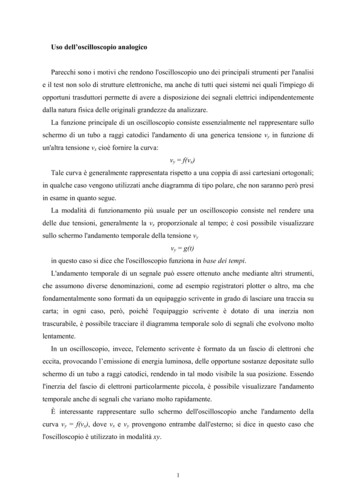
2.2. Sistema6se dice que ésta es una señal digital. Por otro lado, la naturaleza de la señal respectoal tiempo define si una señal es en tiempo continuo o tiempo discreto. Cuando unaseñal está definida para cualquier instante de tiempo podemos decir que es una señal entiempo continuo, mientras que una señal en tiempo discreto está definida únicamenteen determinados instantes (valores discretos) de tiempo.2.2.SistemaSabiendo ya qué es una señal y las principales clases de señales que existen, podemos continuar con el tema central de esta sección. En la figura 2.1 se presenta undiagrama a bloques de lo que es un sistema simple. En una primera aproximación, unsistema puede ser concebido como una caja negra de dos terminales. En una de esasterminales una variable de entrada x(t) es aplicada, mientras que en la otra terminal seobserva una variable de salida y(t). Un sistema se define como una entidad que produce una o varias salidas que pueden influenciar a un entorno dado en función de losestímulos que recibe de éste. Un tipo particular de sistemas presente en la electrónicason los así llamados sistemas de procesamiento de señales. La gran mayoría de los circuitos electrónicos de aplicación práctica pueden ser usados para la implementación dedicho tipo de sistemas. La utilidad real de un sistema de procesamiento de señales esextraer información de una señal. Un sistema de procesamiento de señales puede serimplementado con componentes físicos o mediante un algoritmo [16, págs. 51-94]. Enotras palabras, se puede realizar con hardware apropiado (y eventualmente con softwareespecífico para dicho hardware). Para describir o representar el comportamiento de unsistema con respecto a determinada señal de entrada empleamos ecuaciones o modelosmatemáticos, las cuales están basadas en determinadas reglas de operación impuestaspor la aplicación en la que se usará o en principios físicos.
2. Aspectos generales de los sistemas7EntradaSistemax(t)Saliday(t)Figura 2.1: Diagrama a bloques de un sistema simple2.3.Clasificación de los sistemasYa hemos visto, grosso modo, qué es una señal y qué es un sistema. A continuaciónse presenta una breve descripción de las principales categorías de sistemas que podemosencontrar. Se puede hacer una distinción entre los siguientes sistemas:Sistemas lineales y no linealesSistemas con parámetros variantes en el tiempo y sistemas con parámetros constantesSistemas estáticos (o sin memoria) y sistemas dinámicos2.3.1.Sistemas lineales y no linealesPara que un sistema sea considerado como lineal debe poseer las propiedades dehomogeneidad y de aditividad. Si un sistema no cumple alguna de las dos propiedadesse dice que es no lineal. La primera propiedad implica que si un sistema cuya entradax(t) produce una salida y(t), entonces al escalar por un factor A dicha entrada, la salidadel mismo estará escalada por el mismo factor. Dicho en otras palabras, la magnitud desalida de un sistema lineal es proporcional a la magnitud de su entrada. En la figura 2.2está representado el concepto antes mencionado.x(t)Sistemay(t)A x(t)Figura 2.2: Propiedad de homogeneidadSistemaA y(t)
2.3. Clasificación de los sistemas8La propiedad de aditividad por su parte establece que si un sistema recibe dos omás estímulos diferentes como entradas, entonces la respuesta del sistema debido a lacombinación de dichos estímulos se puede calcular como la suma de la respuesta delsistema a cada uno de esos estímulos por separado. Esta propiedad está representadagráficamente en la figura 2.3.x 1 (t)Sistemay 1 (t)x 1 (t) x 2 (t)x 2 (t)SistemaSistemay(t) y1 (t) y2 (t)y 2 (t)Figura 2.3: Propiedad de aditividad2.3.2.Sistemas con parámetros constantes o invariantes en el tiempoEn los sistemas con parámetros invariantes en el tiempo el valor de sus parámetrosno cambian con el tiempo. Por ende, la respuesta de éstos respecto a una determinadaentrada tampoco cambia con el tiempo. En otras palabras, si un sistema con parámetrosinvariantes en el tiempo genera una respuesta s para una entrada dada e, la mismarespuesta debe ser observada si el sistema recibe la entrada e después de un tiempo τ .Esta afirmación es válida si y solo sí las condiciones iniciales del sistema en cuestiónson las mismas en el momento en que el estímulo de entrada e es aplicado. La figura 2.4representa el concepto anteriormente descrito. Los sistemas con parámetros constantestambién pueden ser referidos como sistemas lineales invariantes en el tiempo o comosistemas estacionarios.
2. Aspectos generales de los sistemas9y(t-T)y(t)tt00TFigura 2.4: Respuesta de un sistema con parámetros constantes o invariantes en el tiempoOtro modo de saber si un sistema está caracterizado por tener parámetros invariantes en el tiempo es a partir de los coeficientes de su modelo matemático (o relaciónentrada-salida). Si los coeficientes del modelo en cuestión no presentan variaciones enel tiempo, se dice que el sistema en cuestión es un sistema de parámetros invariantes enel tiempo.2.3.3.Sistemas estáticos y sistemas dinámicosLos sistemas estáticos o sin memoria son aquellos cuya salida en cualquier instantet depende única y exclusivamente del valor de las señales de entrada en ese mismo instante. Dicho de otro modo, si un sistema estático no tiene una señal de entrada tampocotendrá una señal de salida. Por otro lado, en los sistemas dinámicos (o con memoria) susalida en cualquier instante t ya no está determinada solo por su entrada en ese mismoinstante. La respuesta en estos sistemas ahora depende de la historia (o valores pasados)de la señal de entrada sobre cierto intervalo de tiempo (pasado) así como de la evoluciónpasada de sus variables de estado. Si dicho intervalo de tiempo está definido de (t τ )a t se dice que el sistema es de memoria finita (con τ segundos de memoria) y si estádefinido de - a t, entonces, se dice que el sistema dinámico tiene memoria infinita.Varios circuitos electrónicos que contienen elementos capacitivos y/o inductivos pueden ser vistos como sistemas con memoria infinita. Para dichos sistemas, su respuestadepende del valor de la señal de entrada en el instante t así como de las condicionesiniciales del mismo (o del pasado de la señal de entrada de - a t).
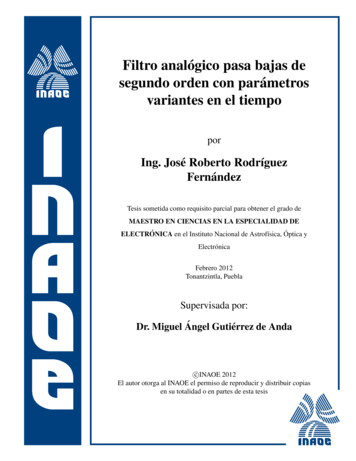
2.4. Sistemas configurables102.3.4.Otras clasificaciones de los sistemasExisten todavía más clasificaciones de los sistemas, de las cuales una de ellas (sistemas configurables) será abordada con más detalle en la próxima sección, mientras queotras las describiremos de forma muy general. Por ejemplo, una clasificación de lossistemas que se puede formular en función del tipo de señales que éste maneja es la desistemas analógicos y sistemas digitales. Un sistema se dice que es analógico si tanto suentrada como su salida es una señal analógica. Lo mismo aplica para un sistema digital. También podemos encontrar sistemas en tiempo continuo y en tiempo discreto. Sunombre se debe precisamente al tipo de señal que manejan tanto en la entrada como ala salida. Los sistemas también pueden ser clasificados como: sistemas causales y sistemas no causales o como sistemas con parámetros agrupados y sistemas con parámetrosdistribuidos.2.4.Sistemas configurablesEn la sección anterior se presentó una descripción general de las principales categorías de sistemas que podemos encontrar. En esta sección se describirá al grupo desistemas que comprende la categoría de sistemas configurables.En la figura 2.5 se propone una clasificación (no exhaustiva) de los sistemas configurables. En esta clasificación se encuentran los sistemas configurables por el usuario ysistemas configurables de forma automática. Los sistemas configurables por el usuarioson aquellos sistemas en los que el usuario debe ajustar por sí mismo todos o algunosde sus parámetros. Este proceso de ajuste es llevado a cabo mediante la modificaciónde una o más señales de control externas al sistema. Estas señales pueden ser inclusovoltajes o corrientes de polarización. Por ejemplo, en [17] se presenta un oscilador configurable de segundo orden basado en el principio dinámico translineal. La frecuenciade oscilación de éste puede ser ajustada sobre un amplio rango de frecuencia a travésde una corriente de polarización.
2. Aspectos generales de los sistemas11Los sistemas configurables de forma automática se distinguen de los sistemas configurables por el usuario porque están dotados de algún tipo de estrategia de controlque les permite inducir algún cambio en su estructura o en sus parámetros. Este cambioes ejecutado por el propio sistema para ajustar su desempeño a un conjunto particularde condiciones de operación. Dentro de esta familia de sistemas se pueden encontrara los filtros adaptivos, los sistemas invariantes en el tiempo externamente lineales yfinalmente a los filtros con parámetros variantes en el tiempo.Sistemas configurablesPor el usuarioFiltros adaptivosDe forma automáticaSistemas externamentelineales e internamenteno linealesFiltros con parámetrosvariantes en el tiempoFigura 2.5: Clasificación de los sistemas configurables.2.4.1.Filtros adaptivosLos filtros adaptivos pueden ser vistos como sistemas configurables cuyos parámetros son variados como resultado de la acción de algún algoritmo de optimización. Lasestrategias de optimización usadas para este propósito son de carácter iterativo y buscan minimizar el valor de la señal de error definida como la diferencia entre algunarespuesta deseada y la salida actual del sistema [18, págs. 1-6]. Debido a la amplia disponibilidad de computadoras digitales y de dispositivos de procesamiento de señalesdigitales, la gran mayoría de los filtros adaptivos son implementados como sistemas detiempo discreto. La estrategia empleada para variación de parámetros en estos sistemaslos provee de una capacidad de respuesta mucho más versátil que el resto de los sistemas configurables. Lo anterior los convierte en los sistemas más aptos para procesarseñales de entrada con fluctuaciones de amplio rango o poco predecibles. Generalmenteson sistemas muy robustos, versátiles y con una amplia variedad de aplicaciones.
2.4. Sistemas configurables122.4.2.Sistemas externamente lineales e internamente no lineales(ELTI)Los sistemas externamente lineales invariantes en el tiempo son sistemas que tienenuna función de transferencia lineal invariante en el tiempo de la entrada a la salida perocuyas variables de estado están definidas en términos de relaciones lineales variant
de retroalimentación, diversos espejos de corriente, así como un bloque encargado de generar una señal exponencial decreciente. La señal exponencial generada por el blo-que anteriormente mencionado es usada para inducir la variación temporal de uno de los parámetros del filtro pasa bajas de segundo orden. Finalmente, la mayoría de circui-
![C9-armonicos-filtros [Modo de compatibilidad]](/img/51/c9-armonicos-filtros.jpg)