Transcription
Universidade de AveiroDepartamento de Electrónica,Telecomunicações e InformáticaInput DevicesVirtual and Augmented Reality 2017/18Beatriz Sousa Santos
What is Virtual Reality?“A high-end user interface that involves real-time simulationand interaction through multiple sensorial channels.” (vision,sound, touch, smell, taste) (Burdea and Coiffet., 2003)2
Input Devices:Trackers, Navigation and gestures interfaces3
Input devices Trackers:– Magnetic (AC, DC)– Optical– Ultrasonic– Inertial,– Mechanical– Hybrid . Navigation and manipulation interfaces:– Tracker-based– Trackballs– 3D mice, . Gesture interfaces:– Gloves– Depth cameras .4
Tracker is a special purpose H/W tomeasure the real-time change in a 3Dobject position and orientationTrackers measure the motion of “objects”(e.g. user head)in a fixed system of coordinates.Virtual objects have 6 degreesof freedom (D.O.Fs):-three translations;-three rotations.- Roll – rotation around the longitudinal axis(Burdea and Coiffet., 2003)5
Example: 3D magnetic sensor in a HMDWithout the head tracker- the image- the soundcannot change tomatch the head postureRequired tracking accuracy:Image sound(Burdea and Coiffet., 2003)6
What is usually tracked?How?Body Tracking:Technologies: Head Electromagnetic Hand and fingers Optical Torso Ultrasonic Feet Inertial A group of people, . MechanicalIndirect tracking:Using physical objects(props and platforms) Hybrid .7
Tracker characteristics: Measurement rate – Readings/sec Sensing latency Sensor noise and drift Measurement accuracy (errors) Measurement repeatability Tethered or wireless Work envelope Sensing degradation8
Tracker performance parameters: Accuracy Jitter Drift Latency Tracker update rateTracker performance parameters should be analyzed to match a solutionfor sensorial channel and budget of an application9
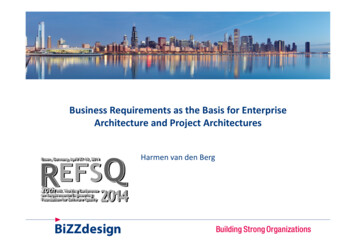
Tracker characteristicsAccuracy:Difference between the object’sactual 3D position and thatreported by the measurementAccuracyReal object position(Burdea and Coiffet., 2003)Tracker positionmeasurements10
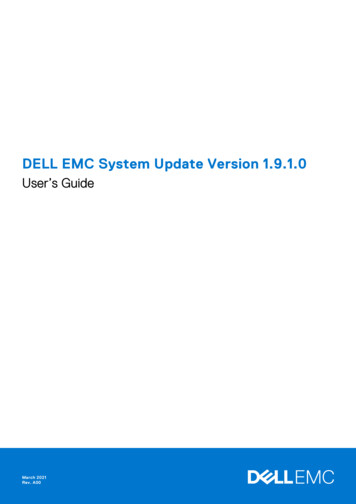
Tracker characteristicsResolution:“the smallest amount of the quantitybeing measured that the instrumentwill detect.”(used by Ascension)Accuracy(Polhemus uses a different definition )ResolutionReal object position(Burdea and Coiffet., 2003)Tracker positionmeasurements11
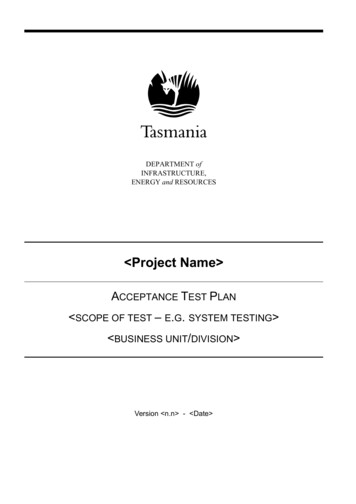
Jitter:Change in tracker output whenthe tracked object is stationaryTracker dataReal object fixedpositionSignal noise(Burdea and Coiffet., 2003)Time12
Drift: Steady increase in tracker error with timeReal object fixedpositionTracker dataSensor drift(Burdea and Coiffet., 2003) Time13
Latency:Time delay between action and result: time between the change in objectposition/orientation and the time the sensor detects this changeTracker dataReal objectpositionSensor latency(Burdea and Coiffet., 2003) Time14
Tracker update rate:Number of measurements that the tracker reports every secondIf the same tracker electronics is used to measure several objects, thesampling rate suffers due to multiplexingDedicated electronics to each tracked objectSame electronics to each tracked object(Burdea and Coiffet., 2003)15
Most used trackers: Magnetic Ultrasonic Optical Inertial 16
Magnetic TrackersA magnetic tracker is a non-contact position measurement device that usesa magnetic field produced by a stationary TRANSMITTER to determine thereal-time position of a moving RECEIVER elementmay be ACDC17
Magnetic Trackers Use low-frequency magnetic fields to measure position Fields are produced by a fixed source Size of source grows with the tracker work envelope The receiver is attached to the tracked object and has threeperpendicular antennas Distance is inferred from the voltages induced in the antennas – needscalibration 18
Magnetic tracker with the old Data Glove(Burdea and Coiffet., 2003)19
Magnetic tracker accuracy degradation(Burdea and Coiffet., 2003)23
Comparison of AC and DC magnetic trackers DC trackers are immune to non-ferromagnetic metals(brass, aluminum and stainless steel) Both DC and AC trackers are affected by the presence of ferromagnetic metals(mild steel and ferrite) Both are affected by copper AC trackers have better resolution and accuracy AC trackers have slightly shorter range24
A “standard” for motion tracking for years:Polhemus(proprietary AC electromagnetic technology)APPLICATIONS:High Accuracy Head TrackingEEG LocalizationTraining and SimulationEye TrackingNeuroscienceBiomechanics25
Widely used and expensive:AscensionTracking, guiding, and localizing medical instruments within apatient's body3D measurement and analysis of human movement forbiomechanical purposes: sports, performance, and designTrack head and objects for matching computer-generatedimagery with head direction; weapon aiming and interactiveinstructionTracking of head, hands and 3D pointers for interactionwith large scale and immersive displays26
Example of a magnetic trackerAuroraAdds customizable real-time spatial measurement technology tosimulation systems to deliver realistic surgical navigation or weaponstargeting simulation in all six degrees of freedom (6DOF).28
29
Example of “Low cost” magnetic tracker: True six degree-of-freedom magnetic motion tracking Precise sensor for 1mm and 1 degree tracking No line of sight to controllers required Low-power magnetic field low power consumption Low latency feedbackRazer Hydra30
Razer Hydra Technical Specifications- Per controller Thumb-ergonomic analog stick for fluid control- 4 Hyperesponse action buttons- Rapid-fire trigger and bumper for faster in-game response- Non-slip satin grip surface- True six degree-of-freedom magnetic motion tracking- Lightweight, anti-tangle braided cableBase station- Low-power magnetic field, low power consumption- Ultra precise sensor for 1mm and 1 degree tracking- No line of sight to controllers required- Low latency feedback- Approximate Size : 120 mm / 4.92” (Length) x 120 mm / 4.92”(Width) x 100 mm / 3.94” (Height)- Approximate Weight : 800 g / 1.76 lbs31
Ultrasonic TrackersA non-contact position measurement device that uses an ultrasonic signalproduced by a stationary transmitter to determine the real-time position/orientation of a moving receiver. (Burdea and Coiffet., 2003)32
Ultrasonic Trackers Use low-frequency ultrasound to measure position Ultrasound produced by a fixed triangular source (speakers) Number of sources grows with the tracker work envelope The receiver is triangular and attached to the tracked object and hasthree microphones Distance is inferred from the sound time of flight Sensitive to air temperature and other noise sources Requires “direct line of sight” Slower than magnetic trackers (max 50 updates/sec)33
Ultrasonic tracker a and Coiffet., 2003)6 DOFsUpdate rate - 50 / secLatency – 30 ms34
Optical TrackersA non-contact position measurement device that uses optical sensing to determinethe real-time position/ orientation of an object (Burdea and Coiffet., 2003)outside-looking-ininside-looking-out35
Outside-looking-inLaserBIRD optical trackerSub-degree and sub-millimeter accuracyMeasurement rate of 240 meas/secTracking response: 7.17 mshttps://www.ascension-tech.com/products/36
Outside-looking inVicon MXhttps://www.vicon.com/ Uses 4 Mpixel cameras with own 120 LEDarray (infrared, or visible red). Accuracy0.02 of a pixel Camera has real-time onboard imageprocessing (masking and thresholding) Resolution 2352x1728 @ 160 fps 8 cameras are connected to a MX net unitwhich then communicates with the PC User wears reflective markers (smallspheres)(Burdea and Coiffet., 2003)
Inside-out optical tracker advantages/ disadvantages The best accuracy is close to thework envelope Very large tracking surface andresistance to visual occlusions(line of sight)(Burdea and Coiffet.,382003)
HTC Vive “Lighthouses”https://www.vive.com/eu/39
Hybrid Ultrasonic/Inertial Trackers No interference from metallic objects No interference from magnetic fields Large-volume tracking “Source-less” orientation tracking Full-room tracking40
But Accelerometer errors a lead to decreased accuracy Errors grow geometrically in time! Gyroscope errors compound position errors Needs independent position estimation to reduce “drift”41
Hybrid Ultrasonic/Inertial Tracker6 DOFsUtrasonic – positionInertial - orientationSub-millimiter accuracyHead hand unitsUsed for:- Training- Assembly/ disassemblyand design review- https://www.virtalis.com/tracking-systems/44
Mechanical TrackersItem is no longer availableA mechanical tracker consistsof a serial or parallel kinematicstructure composed of linksinterconnected by sensorizedjoints.(Burdea and Coiffet., 2003)Mechanical tracker - Push 1280 stereo display(Fakespace Inc)46
Mechanical TrackersPros Use sensors imbedded in exoskeletons to measure position Have extremely low latencies Are immune to interference from magnetic fields and large metal objectsCons Limit the user’s freedom of motion Can be heavy if worn on the body47
Example of an exoskeleton(mechanical tracker)http://www.youtube.com/watch?v uJza6G-7tD4Painting a virtual wall: example of avirtual rehabilitation task for a patientrecovering from stroke or traumaticbrain injury48
Other devices can be used to track(at low kinecthttps://www.leapmotion.com/(Jerald., 2016)49
Navigation and Gesture Input Devices Navigation interfaces allow relative position control of virtual objects(including a virtual camera) Gesture interfaces allow dexterous control of virtual objects and interactionthrough gesture recognition.50
Navigation and manipulationInput Devices Trackballs 3D mice 3D probes Wiimote, Perform relative position/velocitycontrol of virtual objects Allow “fly-by” application bycontrolling a virtual camera51
The Cubic Mouse(research, not commercial)- Allows to intuitively specify 3D- coordinates- The rods represent the X, Y, and Z axes of agiven coordinate systemhttp://www.youtube.com/watch?v 1WuH7ezv i 10.1.1.84.6127&rep rep1&type pdf52
3D mouseSpace controller Sends relative coordinates Allows- to move 3D objects in a moreintuitive way than a 2D mouse- allows rotation around each axis Price 300 utube.com/3DMaus
3D-Spheric-Mouse-Has no mechanical sensors thatcan generate unwantedbehaviors-The specially developed polymerspringbodies create a smoothlyconsistent slide 616049
Item is no longer available5DT Data GloveGesture Input Devices There are/ have been various sensing gloves such as:Pinch Glove- Fakespace Pinch Glove (switches)- Immersion CyberGlove (stain gauges),- Gloveone CyberGlove Have larger work envelope than trackballs/3-D probes Most need calibration for user’s handGloveone55
The dk-sample-app-video
Other devices can be used to detect r.com/57
Speech recognition is also an interesting possibility: Frees hands Allows multimodal input Specialized software Issues: recognition, ambient noise, training, false positives58
An input device “providing an infinit VE”: a treadmill for VRMay have applications, behond gaming: promote physical exercise, train people, https://www.youtube.com/watch?v oWIDqebGUqE59
Virtusphere (“the VR hamster ball”)https://www.youtube.com/watch?v 2e5Qvac3BB860
ConclusionWhen choosing a device, consider: CostGeneralityDOFsErgonomics / human factorsTypical scenarios of useOutput devicesInteraction techniques62
Input outputCyberTouch photos63
Input veone-feel-virtual-reality64
Main bibliography-Jerald, J., The VR Book: Human-Centered Design for Virtual Reality,ACM and Morgan & Claypool, 2016-G. Burdea and P. Coiffet, Virtual Reality Technology, 2nd ed. JonhWiley and Sons, 2003-Craig, A., Sherman, W., Will, J., Developing Virtual RealityApplications: Foundations of Effective Design, Morgan Kaufmann,2009-J. Vince, Introduction to Virtual Reality, Springer, 200465
Tracker data 14 Latency: Time delay between action and result: time between the change in object position/orientation and the time the sensor detects this change (Burdea and Coiffet., 2003) 15 (Burdea and Coiffet., 2003) Tracker update rate: Number of measurements that the tracker reports every second