Transcription
Critical DesignReviewJanuary 4, 20211
Evan WaldronTeam LeadAlex ThomasStructures LeadEvan PattersonPayload Vehicle LeadJustin ParkanAerodynamics LeadDaniel JaramilloPayload Integration LeadRobert KempinRecovery LeadEmma JaynesPayload Imaging Lead2
Final LaunchVehicle DesignMaterial SelectionAirframe SectionsFin Configuration3
Launch Vehicle Dimensions Length: 106.25" Diameter: 6" Launch Weight: 45.4 lbs Empty Weight: 41.3 lbs4
Material SelectionG12 Fiberglass Strong and durable Easily resists compressiveloading and impact forces Moisture resistance isimportant for reusability oflaunch vehicleAircraft-grade Birch Plywood Lightweight and strongmaterial 1/8" thick, two layers usedfor 1/4" fins Bulkhead thickness willvary from 1/2" to 3/4"depending on loading5
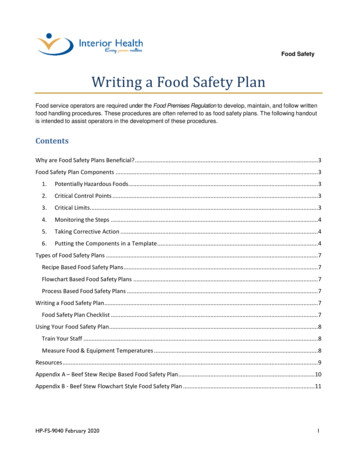
Nose Cone: 4:1 Ogive Commercially available for subscale and full scale Ensures aerodynamic similarity Gives desired stability margin for launch vehicle6
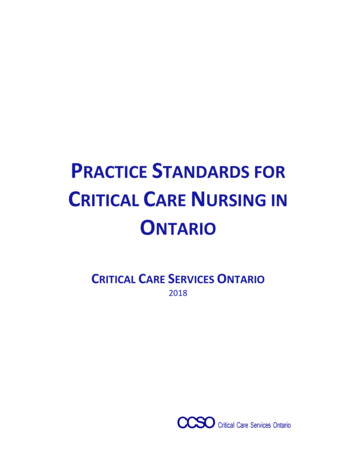
Removable Bulkhead Gives the option to addballast to adjust stability asneeded Gives space for payloadintegration electronics L-brackets will be used tomount bulkhead to nose cone7
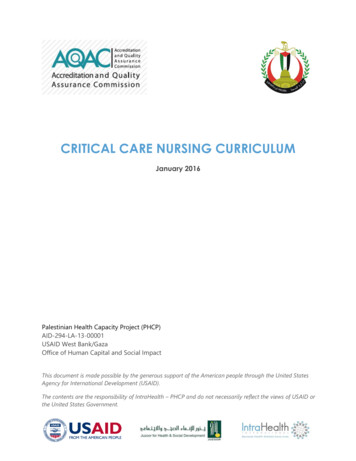
Payload Bay Located between nose cone and main parachute bay Forward location shifts CG forward for better stability Shear pins through body hold payload in place8
Main Parachute Bay Located between payload bayand AV Bay Main parachute packingvolume: 5" D, 7" L Recovery material takes up10" of main parachute baylength Contains piston used in maindeployment9
AV Bay Modular design allows foreasily accessible AV sled Allows simultaneousassembly alongside launchvehicle Easy access to blast capsand U-bolts10
Fin Can Centering rings and engineblock are used to align andsecure motor tube Middle centering ring isadditionally used to align andsupport fins 12.25" space forward of engineblock is used to store drogueparachute11
Three-Fin Configuration Primarily chosen for weight anddrag reduction, as well as lowerchance of weathercocking Leading-edge sweep reduces drag,pushes CP aft, increasingstability Trailing-edge sweep reducesdrag, protects fins from damageon landing12
Finite Element Analysis Used to determine thestress experienced bybulkheads underloading Helps verify that allbulkheads meetdesired factor ofsafety13
RecoverySystem DesignParachute SelectionRecovery HarnessAvionics14
Recovery Overview Drogue parachute deployment atapogee Secondary at apogee 1 sec Main parachute deployment at 700 ft Secondary charge at 650 ft Payload parachute freed at 600 ft Payload parachute deployment at 500ft15
Parachutes Main Parachute: Fruity Chutes 120" IrisUltra Compact Drogue Parachute: Fruity Chutes 18"Classic Elliptical Payload Parachute: Fruity Chutes 60"Iris Ultra Compact16
Recovery Harness Main and Drogue Shock Cord: 40 ft x 5/8" tubular Kevlar Payload Shock Cord: 15 ft x 5/8" tubular Kevlar Rated for 6600 lbf Main parachute attached 160" from nosecone bulkhead Drogue parachute attached 160" from aft AV bulkhead17
Main Recovery Harness Detail Payload deployment via mainparachute recovery harness Piston ejection system used toprotect payload during ejection Allows smaller mainejection charges Redundant Jolly Logicparachute retention systemkeeps payload parachutefurled during maindeployment18
Recovery Avionics Two independent, redundantaltimeter systems managelaunch vehicle recovery Launch vehicle tracked viaEggfinder TX/RX GPS locatorsystem Frequency: 921 MHz, ID #8 Payload parachute kept furledduring main deployment bytwo cross-linked Jolly Logicparachute retention devices19
Altimeters All four flight altimeters will be StratoLogger CF altimeters Fully redundant launch vehicle recovery system Primary Drogue: Apogee, 2.6 g charge Main: 700 ft, 2.9 g charge Secondary Drogue: Apogee 1 sec, 3.1 g charge Main: 650 ft, 3.4 g charge Payload Latch Payload Release20
Eggfinder GPS Tracking System Transmitter Operating Frequency: 921 MHz, device ID #8 Transmitter Operating Power: 100 mW Bluetooth link between receiver and Android phone Rocket Locater App used to plot location informationEggfinder TX TransmitterEggfinder RX Receiver21
Avionics Sled Material selection: Aircraftgrade birch plywood Current Design: Provides for internalwiring Mounts altimeters, screwswitches, launch vehicletracker, and batteries22
MissionPerformancePredictionsTarget ApogeeStability MarginWind DriftRecovery Forces23
Motor Selection AeroTech L1520T Short burn time High Max and AverageThrust RMS 75/3840 Casing24
Target Altitude4473 feetBased on 3 - 14.9 MPH winds 5 cant of the launch rail 144" launch rail25
Predicted Apogee4293 feetReason Weighing constructed partsrather than estimates Better accounting for smallparts in simulations26
Other Key Flight Characteristics Velocity at Launch Rail Departure: 72.70 ft/s Peak Velocity: 532.67 ft/s Peak Mach: 0.471 Mach Peak Acceleration: 684.40 ft/s2 Thrust to Weight Ratio: 7.5227
Apogee UncertaintyUncertainty Wind Speed Payload Weight28
Static Stability Margin ofLaunch Vehicle Initial: 2.07 At departure of Launch Rail:2.1Computational MethodStatic Margin (Calipers)Barrowman's Method2.20RockSim2.0729
Stability Margin UncertaintyUncertainty Payload Weight Payload CG30
Subscale Flight ResultsPredicted Apogee: 2700 ftRecorded Apogee: 1657 ftReason Underestimation of Weight Reduced Stability31
Wind Drift Downrange movement dueto field wind conditions Descent Time: 85 s Drift @ 20 mph: 2490.9 ft Apogee assumed to bedirectly above launch padSpeedApogeeDescentTimeDriftDistance0 mph4473 ft85 s0 ft5 mph4473 ft85 s622.7 ft10 mph4473 ft85 s1245.5 ft15 mph4473 ft85 s1868.2 ft20 mph4473 ft85 s2490.9 ft32
Kinetic Energy Under Drogue Large kinetic energy underdrogue resulting from rapiddescent Critical importance ofsuccessful main ic EnergyNosecone and0.9161 slugsMidsection117.4 ft/s6310.7 ft-lbfFin can117.4 ft/s2539.3 ft-lbf0.3686 slugs33
Kinetic Energy at Landing Consider three cases Payload successfully deployed Payload exits payload bay butremains attached to recoveryharness Payload fails to exit payload bay Worst case scenario: Payloadremains in payload bay Nosecone w/ Payload mass:0.5704 slugs Maximum section kineticenergy: 60.0 ft-lbfSectionMass0.2907slugsNosecone 0.5704w/ Payload Fin canslugsNoseconeDescent Velocity(Payload attached)DescentVelocityKinetic Energy(Payload attached)KineticEnergy14.5 ft/s12.8 ft/s 30.6 ft-lbf23.9 ft-lbf14.5 ft/sN/A60.0 ft-lbfN/A14.5 ft/sN/A29.4 ft-lbfN/A14.5 ft/s12.8 ft/s 36.4 ft-lbf28.4 ft-lbf14.5 ft/s12.8 ft/s 38.8 ft-lbf30.3 ft-lbf34
Main Parachute Opening Shock Confirm that the recoveryharness can withstandopening shock Launch Vehicle massload at main parachutedeployment: 387.8 lbf Kevlar shock cord ratedfor 6600 lbf Shock Cord FS of 17SectionMassOpeningShockForwardSection0.5704 slugs172.2 lbfMidsectionand Fin Can0.7143 slugs303.4 lbf35
Payload Recovery Parameters Maximum Wind Drift:2445.2 ft @ 20 mph Kinetic Energy at Landing:25.0 ft-lbs. Velocity at Landing: 13.4 ft/s Descent Time: 100 sSpeedDescentTimeDriftDistance0 mph100.2 s0 ft5 mph100.2 s611.3 ft10 mph100.2 s1222.6 ft15 mph100.2 s1833.9 ft20 mph100.2 s2445.4 ft36
Payload DesignLOPSIDEDPOS37
LOPSIDED Lander for Observation ofPlanetary Surface Inclination,Details, and Environment Data Main Objectives: House the Planetary ObservationSystem (POS) Land and take initial orientationmeasurement Re-orient within 5 of vertical usinglevelling system Record new orientationmeasurement38
LOPSIDED-POS SequenceFlowchart39
LOPSIDED Sections1. Upper Section2. Middle Section3. Lower Section32140
Structural Frame Used as an assembly structure All three body parts will bemounted to it Fits snugly between body sections Used to bear and distributeopening shock load41
Structural Frame The ARRD and latches will bemounted on the upper sectionwith the POS cameras beneathit and the wood panels on theside The middle piece will bolt ontothe polycarbonate screen 2 bolts run between the middleand lower pieces that will hugthe middle section.42
Assembly43
Levelling and Chassis Design 2-axis (both horizontal)gyroscopic levellingsystem driven by the force due togravity CG will be beneath the twoaxes A ballast will be placed atthe bottom of the chassis toachieve this The chassis will feature a cutoutto increase the rings' range of tilt44
LOPSIDED Tilt Range Range depends on landingorientation Tilt: Min: 15 Max: 20 Grade: Min: 20 Max: 25 45
Support and Levelling System Rods will connect to the rings via ballbearings Leg rotation driven by torsional springs,stopped by cable Materials: Aluminum and carbon fiber46
Levelling Locking Two axes need to be locked Inner ring Outer ring Two 5-volt solenoid locks for each axis47
Electronics Section Lower Third Section ofChassis Contain LOPSIDED andPOS electronics Contain ballast to lower CG All mounted on a sled foreasy access48
LOPSIDED Testing Tilt Range Map max tilt angle aroundthe body Load Bearing Opening Shock Landing49
Planetary Observation System(POS) Payload must capture a 360 panoramic photograph of thelanding site and transmit itback to the team Main Objectives: After self-leveling iscompleted, initiate photocapture Process images to generate360-degree panoramas Transmit images back toteam ground station50
POS Imaging Camera horizontal field of view(HFOV) 194 Capture 194 images andcombine to form panorama Four cameras can capture two360 images Cameras housed in upperLOPSIDED section Wooden mounting block Polycarbonate walls 24" ribbon cables to connectmodules to Raspberry Pi51
LOPSIDED-POS Computing Raspberry Pi 3B used forcomponents of all LOPSIDEDPOS systems Pi will run Raspbian OS withPython Python scripts used to initiateparachute release, leveling, imagecapture , and image transmission Power from 12V battery via voltageregulator POS transmitter, orientationsensor, motor drivers, andcameras receive power directlyfrom Pi52
LOPSIDED-POSelectronics flow chart Electronics forLOPSIDED, POS, andrecovery systems53
POS Electronics Four Arducam Fisheye Camera Modules Power supplied from Pi Arducam Multi-Camera Adapter Board Attachment to Raspberry Pi Adafruit RFM69HCW Transmitter 433 MHz Hiletgo Step Converter w/ USB 12V DC to 5V DC for Raspberry Pi via USB SDR RTL 2832 Receiver Connects to laptop computer via USB54
Leveling System Electronics Four Sparkfun 5V Solenoids LM2596 DC-DC Step-Down Converter 12V DC to 5V DC for solenoids Adafruit BNO055 Orientation Sensor Data used for leveling and POS Adafruit TB6612 Motor Driver Can operate up to four solenoids (twosimultaneously) Accounts for voltage difference betweensolenoids and Raspberry Pi55
Recovery Electronics StratologgerCF Altimeter 9V battery Separate power supply for altimeter Two Dormakaba 3510LM 12VElectromechanical Locks Powered directly from 12V battery Adafruit TB6612 Motor Driver To operate electromechanical locks fromRaspberry Pi BRB900 GPS Transmitter 900 MHz Equipped with separate LiPo battery forpower56
LOPSIDED-POS PowerRequirementsComponentVoltage (V)Current (mA)Active Time (s)Capacity (mAh)BRB900 Tracker4.231572006303510LM EM Lock 055 Accelerometer3.612.3720024.6Raspberry Pi550072001,000Arducam Camera5250151.75RFM69HCW Transmitter 5150120050Open Frame SolenoidSK-F0420 (x4)1225041.11Total---1,71057
LOPSIDED-POS BatterySelection Battery for Altimeter: 9V Alkalinebattery Battery for BRB900: Own LiPo singlecell battery Other components: 1600 mAh NiMh 12Vbattery pack Capacity required is 1,077 mAh for 2 hours ofpower58
Electronics Sled Location of all payloadelectronics exceptsolenoid latches, cameramodules, and groundstation hardware Removable fromLOPSIDED for easyaccess Mounting via woodscrews and hook andloop fasteners59
Image Transmission Digital Slow-Scan Television(DSSTV) Transmission method that utilizesvoice radio frequencies to send staticimages Images are converted to audio (WAV)files, transmitted, and decoded usingcomputer software Low-power compared to othermethods DSSTV limits loss in imagequality compared to analog SSTV Received images will be compiledinto 360-degree panoramas usingimage software at the team'sground station60
Subscale Payload Results Main objectives of subscale payload: Test robustness and image quality of cameras by capturingimages during and after launch Gain experience working with Raspberry Pi/Python Due to the unintended disabling of the Raspberry Pi'sCSI port, no images were able to be captured in flight Camera was still functional after flight, confirmingthat the camera modules are capable of withstandingflight forces61
Payload Integration andDeployment Main Objectives: Retain LOPSIDED throughoutmain-vehicle launch untildeployment. Release LOPSIDED while avoidingimpacts that cause damages toelectronics or leveling components. Release parachute post-landing toavoid parachute pulling onLOPSIDED or covering of POS.62
Final Integration Design Altimeter: StratoLogger CF Sends Signal at apogee( 4,500ft AGL) Shear Pin: Breaking Load: 35lbf Rotary Latch: R4-EM series Holding Force: 1522 lbf Powered by small 12V alkalinebattery Activated by altimeter Maximum load experienced:360 lbf63
Payload Deployment Sequence Steps:1. Payload is pulled by the main parachutedeployment at 675 ft AGL. Altimeter ignitesat 500 ft AGL separating payload from mainchord.2. LOPSIDED exits and pulls the payloadparachute from the bag attached to the mainparachute chord.3. Payload proceeds to fall under a parachute.4. Accelerometer detects impact and activatesthe electromechanical locks to releaseparachute upon landing.64
Final Payload Deployment Design Advanced Retention Release Device(ARRD) Altimeter sends electricsignal through e-match to ignitethe ARRD's black powder Activated at 500 ft AGL Supports up to 2,000 lbf ARRD is attached to LOPSIDEDusing the ARRD housing shown Electromechanical lock Model: Dormakaba 3510LM CabinetLock Holding Force: 250lbf Dimensions: 1.65in x 1.65in x 0.79in65
Launch VehicleInterfacesInternal InterfacesExternal Ground Interfaces66
Internal Interfaces Recovery harnesses attachedto bulkheads AV Bay bulkheads hold blackpowder charges LOPSIDED deployed bymain parachute recoveryharness Separating sections securedby nylon shear pins67
Ground Interfaces Launch buttons/rail Buttons interface with 12-footlong 1515 rail EggFinder TX/RX Launch vehicle tracker BigRedBee BRB 900 Payload tracker 433 MHz SSTV Transmitter Payload imaging68
RequirementsVerificationVerification StatusTesting Plan69
Status of Requirements Verification All requirements verified by analysis have been verified Stability margin, rail exit velocity, kinetic energy, wind drift, etc. Demonstration and inspection requirements haveverification plan detailed in the CDR document Varies for each requirement, requires launch vehicle or payload tobe constructed See testing plan for requirements verified by test70
Verification Plan Example Specifics of verification detailed on each requirement71
Testing Plan Used to quantifiablyvalidate design performance Schedule and successcriteria detailed in CDRdocument Examples: Bulkhead tensile strength Shear pin loading Battery life72
Payload Test Suite Five tests are planned to be conducted for variousLOPSIDED-POS systems Includes tests for LOPSIDED, POS, and recovery andintegration First test scheduled for 1/29/2020, last test scheduled for2/16/2021 Used to verify requirements NASA 2.7, 3.13, 3.13.2, 4.2,4.3.3, 4.3.3.1, 4.3.3.2, .3.4, and TDR 4.6, 4.8, 4.14, 4.15, 4.1673
Questions?74
LOPSIDED-POS Computing Raspberry Pi 3B used for components of all LOPSIDED-POS systems Pi will run Raspbian OS with Python Python scripts used to initiate parachute release, leveling, image capture , and image transmission Power from 12V battery via voltage regulator POS