Transcription
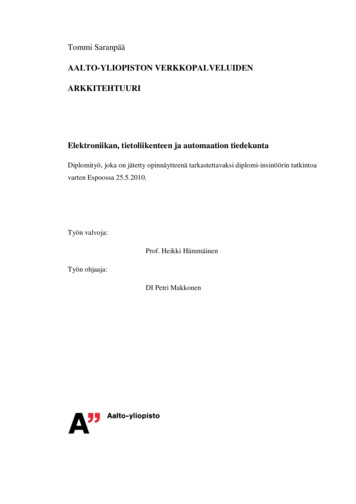
ProtocolTesting:Review of Methods andRelevancefor SoftwareTestingGregor v. Bochmann and AlexandrePetrenkoD4partement dinformatique et de recherche op&at.ionnelle, Universit6 de Montn%l, CP. 6128, Succ.Centre-Ville, Montr6al, Canada H3C 3J7Abstract.Communicationprotocols are the rulesthat govern the communication between the different components within a distributed computer system. Since protocols are implemented in softwareand/or hardware, the question arises whether theexisting hardware and software testing methodswould be adequate for the testing of communicationprotocols. The purpose of this paper is to explain inwhich way the problem of testing protocol implementations is different from the usual problem ofsoftware testing. We review the major results in thearea of protocol testing and discuss in which waythese methods may also be relevant in the moregeneral context of software testing.1. IntroductionDuring the last ten years, much research resultshave been obtained in the area of protocol conformance testing in view of obtaining better and moresystematic methods for the testing of protocol implementations against their specifications.At thesame time, the methods for testing computer hardware and software have also evolved. Since protocols are implemented in software and/or hardware,the question may arise whether the existing hardware and software testing methods would be adequate for the testing of communication protocols.The purpose of this paper is to explain in whichway the problem of testing protocol implementations is different fkom the usual problem of software testing, We will review the major results inthe area of protocol testing and discuss in whichway these methods may also be relevant in themore general context of software testing.Protocol testing is mainly based on the blackbox approach. Therefore the nature of the protocolspecificationhas a strong influence on protocoltesting. In fact, the methods for the development oftest cases are largely dependent on the specificationformalism.Permission to copy without fee all or part of this material isgranted provided that the copies are not made or distributed fordirect commercial advantaqe, the ACM copyright notice and thetitle of the publication and Its date appear, and notice is giventhat copying is by permission of the Association of ComputingMachinery. To copy otherwise, or to republish, requires a feeand/or specific permission.ISSTA 94- 8/94 Seattle Washington USA@ 1994 ACM 0-89791 -683-2/94/0008. 3.50109Most communication protocols have a reactive nature; therefore specification languages for reactivesystems are favored which precisely define thetemporal ordering of interactions.It is thereforeunderstandable that the finite state machine (FSM)model is often used for defining protocol specil3cations. For this reason, most work on protocol testing has been based on FSM models.In Section 1, we discuss the main characteristicsof communicationprotocols and different formaldescription techniques which have been used in theprotocol engineering cycle.In Section 2, we review the main results in thearea of test suite development based on specii3cations given in the form of deterministic or nondeterministic FSM models. Emphasis is put on methods that are related to a particular conformance relation which the implementationunder test shouldsatisfy in respect to the specification. Also, the testsuite should be complete in respect to a given faultmodel, which is defined in terms of the set of faultyimplementations that the test suite should be able todetect.We then give in Section 3 an overview of sometesting issues related to test suite development forspecification written in LOTOS, or other specification formalisms based on rendezvous communication.In Section 4, we discuss the main approaches tothe testing in respect to specifications written in anextended FSM formalism,such as the languagesSDL and Estelle. In this context, there are manyrelations with software testing methods, becausethe extensions of the FSM model are usually defined with programming language concepts.In Section 5, we discuss the impact of the testarchitecture which, in the case of protocol testing,usually involves several access points, partial observation and synchronizationproblems betweenthe different parts of the test system. These issueshave a strong impact on testability. Finally, we review the practice of protocol conformance testingand state our conclusions.1.1. The natureof protocoltestingcommunicationprotocols are the rules that governthe communicationbetween the different components within a distributed computer system. In order to organize the complexity of these rules, theyare usually partitioned into a hierarchical structureof protocol layers, as exemplified by the seven layers of the standardized0S1 Reference Model[1S7498].Figure 1(a) shows a communicationsystemfrom the point of view of two users. The users interact with the communicationservice through interactions, called service primitives,exchanged at
so-called service access points (SAP). The definition of the behavior of the box which extends between the two users is called the service specification. It defines the local rules of interactions at agiven service access point, as well as the so-calledend-to-end properties which relate the interactionsat the differentaccess points and represent thecommunication properties, such as end-to-end connection establishment or reliable data transfer.SAP1SAP2communicationserviceNcommunlcah Figure1: The architectureof a communicationsystem.Figure 1(b) shows a more detailed view of theservice box showing two so-called protocol entities(PE) which communicate through an underlying,more simple communication service. The definitionof the required behavior for a protocol entity iscalled the protocol specification,and involves theinteractions at the upper and lower service accesspoints. In addition, the protocol specification usually identifies different types of so-called protocoldata units (PDU, or messages) which are codedand exchangedbetween the protocolentitiesthrough the underlying medium.The disciplineof protocolengineering[Boch93],[Boch90] deals with the methods fordeveloping communicationprotocol specificationsand implementations,includingthe activities ofvalidation.Protocol implementationsare testedagainst the protocol specification in order to assurecompatibilitywith other implementationsof thesame protocol. This is called protocol conformancetesting. In addition, implementationsare usuallyalso tested for other properties, not specified by theprotocol, which may include implementation-specific choices, robustness to user errors and performance properties. We call this type of testing implementation assessment.For certain protocol standards, the standardization committees have also defined standardizedconformance test suites, which usually consist of alarge number of test cases. The successful execution of these test cases should provide a reasonableassurance that the tested implementationsfollowsall the rules defined by the protocol.One of the main characteristics of protocol testing is the fact that conformance testing is black-boxtesting. This implies that a precise reference specification must be provided, which is the basis forthe derivation of the test cases and the analysis ofthe test results. (This specificationis in fact theprotocol specification, which defines the requiredproperties of any implemented protocol entity).1.2. Specificationcations protocolsforcommuni-As they develop, protocols must be describedfor many purposes. Early descriptions provide areference for cooperation among designers of different parts of a protocol system. The design mustbe checked for logical correctness. Then the protocol must be implemented, and if the protocol is inwide use, many different implementationsmayhave to be checked for compliance with a standard.Although narrative descriptions and informal walkthroughs are invaluable elements of this process,painful experience has shown that by themselvesthey are inadequate.The informal techniques traditionallyused todesign and implement communicationprotocolshave been largely successful, but have also yieldeda disturbing number of errors or unexpected andundesirable behavior in most protocols. The use ofa specification written in natural language gives theillusion of being easily understood, but leads tolengthy and informal specificationswhich oftencontain ambiguities and are difficult to check forcompleteness and correctness. The arguments forthe use of formal spec lcation methods in the general context of software engineering apply also toprotocols.In this context, many different formal description techniques have been proposed fur the protocolengineering cycle, including finite state machines(FSM), Petri nets, formal grammars, high-levelprogr amming languages, process algebras, abstractdata types, and temporal logic. The simpler models, such as FSM, Petri nets and formal grammars,were often extended by the addition of data parameters and attributes in order to naturally deal withcertain properties of the protocols,such as sequence numbering and addressing [Boch90].With the begiming work on the standardizationfor Open Systems Interconnection(0S1), specialworkinggroups on “Formal DescriptionTechniques” (FDT) were established within 1S0 andCCITT in the early eighties with the purpose ofstudying the possibility of using formal speciilcations for the definitionof the 0S1 protocols andservices. Their work led to the proposal of threelanguages, Estelle, LOTOS and SDL, which arefurther discussed below (for a tutorial introductionand further references, see [Budk87], [Bo1o87] and eli89],respectively). These languages are calleddetiptiontechniques,since care has beentaken to define110languagesnot onlya formalsyntaxfor the lan-
guage, but also a formal semantics which definesthe meaning, in a formal manner, of any validspecification. This is in contrast to most programming languages which have a formallydefinedsyntax (for instance in BNF), but an informallydefined semantics. The formal semantics is essential for the construction of tools which are helpfulfor the validation of specifications or the development of implementations.While SDL had been developed within CC!ITTsince the seventies for the description of switchingsystems, Estelle and LOTOSwere developedwithin ISO for the specification of communicationprotocols and services. However, all these languages have potentiallya much broader scope ofapplications. However, their effective use in the0S1 area, so far, has been relativelyslow. Thismay be partly explained by the competition betweenthese three languages, which each have certain advantages, and by the difficulty many people have inlearning anew language.In Estelle, a speciilcation module is modeled byan extended FSM. The extensions are related to interaction parameters and additional state variables,and involvetype definitions,expressionsandstatements of the Pascal programming language. Inaddition, certain “Estelle statements” cover aspectsrelated to the creation of the overall system structure consisting in general of a hierarchy of moduleinstances. Communicationbetween modules takesplace through the interaction points of the moduleswhich have been interconnectedby the parentmodule. Communicationis asynchronous, that is,an output message is stored in an input queue of thereceiving module before it is processed.SDL, which has the longest history, is alsobased on an extended FSM model. For the dataextensions, it uses the concept of abstract datatypes with the addition of a notation of programvariables and data structures, similar to what is included in Estelle. However, the notation is not related to Pascal but to CHILL, the programminglanguage recommended by CCITI’. The communication is asynchronous and the destination processof an output message can be identified by variousmeans, including process identifiers or the namesof channels or routes. Recently, the language hasbeen extended to include certain features for objectoriented specificationsIn contrast to the otherFDT’s, SDL was developed, right from the beginning, with an orientation towards a graphical representation. The language includes graphical elementsfor the FSM aspects of a process and the overallstructure of a specification.The data aspects areonly represented in the usual linear, program-likeform. In addition, a completely program-like formis also defined, called SDL-PR, which is mainly111used for the exchange of specificationsbetweendifferent SDL support systems.LOTOS is based on an algebraic calculus forcommunicating systems (CCS iln80])which includes the concept of finite state machines plusparallel processes which communicate through arendezvous mechanism which allows the specification of rendezvous between two or more processes.Asynchronous communicationcan be modeled byintroducing queues explicitly as data types. The interactions are associated with gates which can bepassed as parameters to other processes participating in the interactions. These gates play a role similar to the interaction points in Estelle. The data aspects are covered by an algebraic notation for abstract data types, called ACT ONE, which is quitepowerful, but would benefit fkom the introductionof certain abbreviated notations for the descriptionof common data structures. A graphical representation for LOTOS has also been defined.In addition to the formal description techniquesdiscussed above, the 0S1 standardization committees also use certain semi-formal languages (whichhave no formally defined semantics). In particular,a language called ‘ITCN [Sari92] is used for describing conformancetest cases, and the ASN. 1notation is used for describing the data structures ofthe protocol data units (messages) exchanged bythe 0S1 application layer protocols euf92].Thisnotation is associated with a coding scheme whichdefines the format in which these data units are exchanged over the communicationmedium. All theother languages mentioned above do not addressthis problem.In the context of application layer protocols, inparticular for Open Distributed Processing and distributed systems management, certain forms of object-orientedspecificationsare being used whichare based on extensions of ASN. 1. Also the fonrmlspecification language Z has been proposed, whichis based on set theory and predicate calculus, andwas originallydeveloped for software specifications.2. Testing based on FSM specificationsThe development of testing methods based onFSM specificationshas initiallybeen driven byproblems arising from functional testing of sequential circuits. The appearance of communicationprotocols has given to this theory a new boost.Currently, this model is also attracting much attention in relation with testing of object-oriented software systems [Hoff!13], [Turn92]. Moreover, recent results in binary decision diagram (13DD) technology have increased our ability to deal with thelarge number of states [Brya86]. Traditional workin this field has relied on the model of completely
specified deterministicfinite state machines. Recently, more complex FSM models have also beenstudied.2.1. Basic definitions:conformancerelationsFSMmodelsandA nondeterministicfiite state machine (NFSM)is an initializednondeterministicMealy machinewhichcan be formallydefinedas follows[PBD93]. A nondeterministicfinite state machineA is a 6-tuple (S, X, Y, h, SO,DA), where S is a setof n states with so as the initial state; X is a finite setof input symbols; Y is a finite set of output symboly DA is a specification domain which is a subsetof SXX;DA andP(SXY),h isa behaviorwhere P(SXY)functionh;is the powersetofSXY. The behavior functions defines the possibletransitions of the machine. For each present state Siand input symbol x, each pair (s y) in the result ofthe function represents a possible transition leadingto the next state Sj and producing the output y. Thisis also written as a transition of the form Si-X/y- Sj.machine A becomes deterministic(FSM)Thewhen lh(s )l 1 for all (SJ) e DA. In a deterministic machine, instead of the behavior function, weuse two functions:output functionthe next state functiond, and theAIn the general case, let a x xz.x e X*, a iscalled an acceptable input sequence for stateSi eS,if there exist k states sil, siz, . sik c S and anoutput sequence y yIyQ. .y G Y* such that thereis a sequence of transitions Si-Xz/yl- Sil-X2/y2- Si2- . . . - sik.l-x ykin the machine. We use SikX to denote the set of all the acceptable input sequences for the state si and x; for the state SO,i.e.for A. We extend the behavior function to the setxlof all acceptable input words (sequences) con-taining the empty word e, i.e., h: SxX P (S xY*) [PBD93].An NFSM A is said to be completely specified,if DA ixX.If DA@xXthenA is consideredpar-tially specijied. An NFSM will be also referred toas a complete or a partial machine.The equivalence relation between two states SiandSjintheNFSMAholdsif X7 XJ*andx; (h2(si, ) h2(sj, )), otherwise,VCXGthey arenonequivalent,here hz is the second projection ofthe behavior function which corresponds to theoutput function of the deterministic FSM [Star72].112The machine is said to be retiedif all its states arepairwise nonequivalent. Two NFSMS A and B aresaid to be equivalent if their initial states are equivalen intuitively, this means that the observable behaviors of the two machines are identical.Given a NFSM A (S, X, Y, h, SO,DA), A issaid to be initiallyconnectedif Vs G S 3 a Xl(se hz(s ,a)), where hl is the frost projection ofthe behavior function which corresponds to thenext function of the deterministicFSM [Star72].Every NFSM is equivalent to an initially connectedone.The complete NFSM B (T ,Y,H,t )is saidto be quasi-eqtu”valent to A if for all acceptable input sequences a X: (Hz(tO,tz) hz(sO, a)). Intuitively, this means that for the input sequences forwhich the behavior of A is defined, the behavior ofB is identical.Given the NFSM A (S, X, Y, h, SO,DA), andcomplete NFSM B, B is said to be a reduction ofA,writtenB A,if VaG X;( H2(to,a)GItz(sO,a) ). Intuitively,this means that for the inputsequences for which the behavior of A is defined,the output sequences of B are included in those defined for A.The equivalence, quasi-equivalence,and reduction relations between NFSMS are widely used asthe conformance relations between implementationsand their specifications in protocol test derivationbased on the finite state machines.2.2. Interfaces,fault models and completetest suitesIn protocol engineering, it is customary to distinguish (at least) two levels of abstraction for thedescription of module interfaces: For the protocoland service specifications, the interactions at a SAPare described at an abstract level in terms of atomicevents which normally correspond to a request bythe user or an indication received by the user fromthe protocol entity. For each implementation of theprotocol, an implementation of the abstract interfaceis provided either in software (e.g. procedure calls,operating systems calls) or hardware. The nature ofthe interface implementationis not defined by theprotocol specxlcation. Only the abstract propertiesof interactions, their parameters and ordering constraints defined by the protocol specification mustbe reflected by the implementation.The test cases developed for the conformancetesting of a given protocol should be applicable toall implementations of that protocol, irrespective ofthe interface conventions used by the implementation. Therefore these test cases are based on the
abstract interface definition of the specification. Inorder to execute such a test case with a given implementation under test (JUT), these abstract interactions must be realized in terms of the concreteinterface adopted by the protocol implementation.For instance, the upper tester (UT) accessing theupper SAP of the IUT (see Figure 2) must beadapted to the particular SAP interface adopted bythe IUT.We conclude that in case of black-box testingbased on the specification of the I’UT, the test suitemust be developed based on the abstract interfacesdefined within the specification, and it must be assumed that the (abstract) properties of these interfaces are satisfied by the concrete realization ofthese interfaces in the implementationunder testwe call this the correct interjace assumption. (Howthe validity of this assumption can be tested is outside the scope of this paper).In the context of FSM-based testing, it is assumed that the interface is event-driven, and moreover, that all events on the interface are alternatelycontrolled by the environment and the IUT. In particular, there exist two channels, one is to convey“inputs” of the environment and the second is to receive “outputs” from the IUT. Each abstract inputyields exactly one output symbol, and the next input symbol can be sent to the IUT only after theIUT has moved into a stable state and produced anoutput symbol in response to the previous input.An output reaction of the IUT to any input can be inthe form of a meaningful output (as explicitly defiied by the specification),an “error” or a “null”output (which means “no output”, and which willbe detected by waiting a specifkd time-out period).All these outputs can be observed and are treated asabstract output symbols.Based on such an interface, the reference behavior is assumed to be specified as an NFSM. Thecorrect interface assumption implies that any KITcan also be modeled as an NFSM. In particular, noIUT can “refuse” to execute any input in any of itsstates or produce an output without any input. AnyIUT is thus a completely specified NFSM whoseinput alphabet at least includes the one of the specification NFSM. Moreover, the implementations arecomplete machines even if the specification is apartial machine and include the input alphabet of thereference NFSM.In order to introduce the notion of test coverage,it is necessary to determine which faults of an implementation should be covered. One way to introduce a fault model is by defining a set of implementations with erroneous behavior that should be detected by the test suite. If this set is finite, a finitetest suite exists that covers all faults; if it is not finite, there may be no finite test suite that covers all113faults. In order to define a fault model, we take themutation approach, where a mutant of a specification A is any implementationthat satisfies the correct interface assumption. In the case of FSMbased conformance testing, the mutants of A are theclass of all completely specified NFSMS with thesame input alphabet. A fault model 5 is a subset ofthis class.The concept of conformance relation is neededto distinguish mutants which could exhibit an erroneous behavior BD93].It is usually introducedwhen both the IUT and its corresponding specification are represented with the same formalism. Inthe case of the FSM model, the equivalence, quasiequivalence, and reduction relation are natural candidates for conformance relation. The given specification NFSM A and a conformance relation confpartitionthe set of mutants 5 into the subsets ofconforming implementationsC(A) {1 I IG i? & Iconf A } and non-conformingimplementationsN(A) for the given specification A, i.e., N(A) {1 IIC 3 & I notconf A }. Based on this partition, thenotion of a complete test suite for a given NFSM Awith respect to a given conformance relation andfault model can be formally introduced as follows.A test suite E sX is said to be compzete for thespecification NFSM A and the fault modeI 5 w.r.t.the reduction relation if for any NFSM B (T, X,Y, H, to) in 5 which is not a reductionexistan a Eand a yG Hp(to, a)of A, thesesuchthatyzh2(s0,@. Similarly, complete test suites are defined for the equivalence and quasi-equivalence relations. A complete test suite guarantees detectionof all mutants in the fault model that do not conform to the specification.Them are different ways to characterize a mutant, or the set of mutants within a given faultmodel. The traditional mutation approach defines aset of mutation types, each representing a specifictype of structural fault, that is, a modificationwhich may be introduced into a specification in order to obtain a different behavior. In the so-calledsingle fault model, the mutants considered are thoseobtained from the specification by applying a singlemutation of one of the specified types. In the caseof the so-called multiple fault modkl, the mutantssuch mutations. Inare obtained by me or sev the case of FSM speciflcat.ions, the mutation typesconsidered are usually ouqwt faults (the output of atransition is wrong) or lransfer faults (the next stateof a transition is wrong). In the area of softwaretesting, various types of mutations may be considered, such as sequencing faults (e.g. missing alter-
native path, improper nesting of loops, WHILEinstead of REPEAT,wrong logic expression tocontrol a conditional or looping statement); arithmetic and manipulativeerrors, such as ignoringoverflow, wrong operator (e.g. GT instead of GEor instead of *); calling of the wrong function;wrong specification of data type and/or wrong format of data representation; wrong initial value, orwrong number of data elements; or a reference toan undefined variable or the wrong variable.This “fault-based”identificationof mutantsseems most natural in the context of diagnostictesting where one wants not only detect erroneousbehavior, but also determine how the implementation could be changed in order to make it conformto the specification(e.g. identify a faulty component to be replaced, or identify the part of the proor the part of the FSM state table that shouldbe corrected). It seems that it works well in thecontext of deterministicand completely definedFSM specifications,however, in the context ofnondeterministicsystems, there are many exampleswhere a few mutations lead to a mutant that conforms to the speciilcation;the correspondence between mutations and erroneous behavior is therefore not straightforward.Therefore one uses oftena “wholistic”identificationof mutants, simplycharacterizing the erroneous behavior of the mutantby an appropriate model without comparing itsstructure with the structure of the (correct) ifieddeterministicFSMSThe simplest fault models are defined for specifications which can be represented by completelyspecified deterministic FSMS. In this class of machines, the equivalence relation serves as conformance relation, and the mutants are completelyspecified deterministic machines.When applied to such a machine, the mutationtechnique yields a certain number of mutant FSMS.A particular mutant FSM can be generated ilom thespecification FSM by changing the next state and/orthe output of a number of selected transitions between states. This mutant machine represents acertain combination of output and transfer faults.The number of all possible mutants grows exponentially when the number of states and inputs increase, therefore, some heuristics, such as information about the implementation, severity of faults,test hypotheses should guide this process. Basedon the set of mutants considered, it is possible tofind in one way or another a set of tests which distinguish (kill) all these mutants from the specification FSM.There are different methods for defining the set114of mutants in the fault model, such as the following. In each case, corresponding methods of deriving a complete test suite have been developed.(1) Limitingthe numberof states: The faultmodel consists of the universe Sn of all completedeterministic FSMS with a number of states lessorequal to nt, and which have the input alphabet ofthe specii3cation FSM A, where m n, the numberof states in A. Guessing the bound m is an intuitiveprocess based on the knowledge of a specification,the class of implementationsand their interiorstructure which have to be tested for conformance.The value of m can be also limited due to economicconsiderations. The larger the bound is chosen, thelarger the complete test suite is, as it is illustratedby the existing upper bounds for the complexity oftests [PBD93].The methods for deriving complete test suiteshorn complete deterministic machines are all basedon transition checking approach enn64].Eachmethod, however, requires a distinct type of acharacterizationset [Vasi73] (a W-set) used forstate identification.The UIOv-method[Vuon89],for instance, constructs the W-set only from socalled unique input/output sequences. The methods[Yevt90a],[Petr91], [Petr92] are based on “harmonized” state identifiers eliminating the verilZcation phase that is necessary for the W- and Wpmethods [Chow78],[Fuji9 1]. The methods in[Vasi73], [Chow78], [Fuji91], [Yevt90a] allow theIUT’S to have more states than in the specification(i.e., m2n); and the others [Vuon89],[Petr91], etr92] do not (i.e., m n). Which of these methods can produce a shorter complete test suite for agiven FSM and nz n, is still an open question. Allthe mentioned methods assume that a reliable resetis available in the IUT’s; note that there is anothergroup of methods which guarantee full fault coverage without this assumption (see, e.g., enn64],and the UIOG-methodin [Yao93]). They can beapplied for reduced, deterministic,strongly connected FSM’S. However, these methods usuallyyield much longer complete test suites than theformer. Earlier reviews of the test derivation methods especially of those that do not guarantee fullfault coverage, can be found elsewhere (see, e.g., ra.191], [Sidh89]).The complexity of a corresponding complete testsuite seems to be the price for assuming such abroad fault model. A more restricted fault modelrequires, however, a justit3cation for each particularapplication.(2) Outputfaults only: These
software testing. We review the major results in the area of protocol testing and discuss in which way these methods may also be relevant in the more general context of software testing. 1. Introduction During the last ten years, much research results have been obtained in the area of protocol confor-mance testing in view of obtaining better .