Transcription
1
2
1.GENEL ÖZET41.1Tasarım Süreci41.2 Temel Görev Gereksinimleri ve Tasarım Süreci41.3 Sistem Performans Özelikleri52.YÖNETİM ÖZETİ62.1 Takım Organizasyonu62.2 Zaman Akış Çizelgesi73.DETAYLI TASARIM83.1 Tasarımın Boyutsal Parametreleri83.2 Tasarımın Yapısal Özellikleri103.2.1 Gövde, Mekanik Sistemler103.2.2 Aerodinamik Özellikler123.2.3 Görev Mekanizması Sistemi133.2.4 Elektrik Elektronik Kontrol ve Güç Sistemleri Entegrasyonu153.3 Uçuş Performans Parametreleri173.4 Hava Aracı Maliyet Dağılımı204.PROTOTİP ÜRETİM SÜRECİ214.1 İHA İmalat ve Montaj Süreci214.2 Elektrik Elektronik Entegrasyon Süreci214.3 İHA Montaj ve Genel Kontroller224.4 Üretim İş Zaman Çizelgesi Planlanan ve Gerçekleşen245.TEKNİK ÇİZİMLER253
1. GENEL ÖZET1.1 Tasarım SüreciLiteratür taraması yapıldıktan sonra yarışma şartnamesi detaylıca incelendiğindeüretilen aracın sırasıyla 1. görev içi mümkün olan maksimum hızda ve minimumağırlıkta olması, 2. görev için ise yine maksimum hızda fakat yükü isabetli bir şekildeistenilen alana bırakabilen bir kabiliyette olması gerektiği onu seçildi. Gövde malzemesi olarak yüksek mukavemetine rağmen biryandan da hafiflik sağlayan karbon fiber plaka kullanılmasına karar verildi.Malzemelerin rahat yerleştirebilmesi için gerekli alanı sağlayabilen ve manevrakabiliyeti yüksek olan HX çerçeve türü seçildi. Kullanılacak elektronikler belirlendiktensonra elektroniklerin ve sığabileceği minimum gövde boyutlarına sahip gövdeSolidworks üzerinden tasarlandı. Statik analizler sonucunda ise gövde tasarımı revizeedildi. Takım üyeleri tarafından özgün olarak tasarlanan gövde, karbon fiber plakadanCNC kesim ile üretildi.1.2 Temel Görev Gereksinimleri ve Tasarım SüreciAraç için 1. görevde yük ile birlikte görevi yapabilen ve 2. görevde yükü bırakılmasıgereken alana kadar rahatlıkla taşıyıp bırakılabilen bir yük bırakma mekanizmasıSolidworks üzerinden tasarlandıktan sonra 3D yazıcıdan PLA malzeme ile basıldı. Bumekanizma, danışma değerlendirme kurulunun bildirdiği 178 mm uzunluğa ve 58 mmgenişliğe sahip olan 330ml su şişesi yükünü kolaylıkla ve stabil olarak tutabilen birşekilde tasarlandı. Yük bırakma mekanizmasının kapağı servo motor ile kontroledilerek açık veya kaplı konuma getirilmektedir.Yükün bırakılmasının ardından hızını düşürerek hedef alana zarar almadaninebilmesi için paraşüt eklentisi tasarlandı. Tasarlanan paraşüt şişenin kapakkısmındaki boğuma ip yardımı ile düğüm atılarak bağlanmaktadır.Araç her iki görevi de otonom olarak gerçekleştirecektir. Araca otonom uçuşözelliği kazandırmak için harici olarak gps, pusula gibi sensörlerin bağlandığı4
Pixhawk 4 mini kartına ardupilot yazılımı yüklenerek Mission Planner üzerindenuçuş rotası çizilmesi şeklinde otonom uçuş özelliği kazandırıldı.Mekanik bir güvenlik önlemi olarak, kestirilen karbon plakaların olası kazadurumunda minimum zarar vermesi için köşeli tarafları zımparalandı. Elektronikolarak ise mümkün olduğunca makaron kullanılarak açıkta elektrik geçiren kablo vebağlantı yerleri izole edildi. Ayrıca acil durumlarda elektriği kesmek için akım kesicive kısa devre veya arızalı parçalardan dolayı oluşan yüksek akım durumları içinsigorta kullanıldı. Yazılımsal olarak ise kumanda bağlantısının kesilmesi gibi acildurumlarda araç RTL moduna geçerek kalktığı konuma geri gelmektedir. Eğerkalktığı yere inecek kadar pil gücü yok ise olduğu konuma inmektedir.Çalışmalarımızı yaparken COVID-19 salgını önlemlerine uyarak mümkün olduğuncakapalı alanda kalmayarak kaldığımız durumlarda ise sosyal mesafe mümkünolduğunca korunarak maske takıldı. Bunu yanı sıra gözlük eldiven gibi koruyucuekipmanlar kullanılarak kapalı alanda pervaneler takılı iken test yapılmadı.1.3 Sistem Performans ÖzelikleriAracın sistem performans özellikleri profesyonel xcopterCalc programı üzerdenaracın özelikleri ve kullanılan malzemeler girilerek hesaplanmıştır. Hesaplanandeğerler tablo x te verilmektedir.Performans ParametreleriYüksüz AğırlığıYük Taşıma KapasitesiMaksimum HızTırmanma HızıOrtalama Uçuş SüresiMaksimum MenzilHavada Asılı İken VerimlilikMakimum Gazda VerimlilikMaksimum Yatış AçısıMaksimum Çekilen GüçMaksimum Çekilen Amper1325 g3675 g32 m/sn17m/sn2.5 dk2.4 km83.90%72%74 4460 W180ATablo 15
2. YÖNETİM ÖZETİ2.1 Takım OrganizasyonuŞekil 1 te KİTT Alaca Doğan takımı takım şeması tablo 2’de ise takım üyelerinitanıtan bilgiler verilmektedir.Şekil 1İsim SoyisimZafer KARAGÖZMuhammed EmreKOCAMANTanıtıcı Bilgi9 Yıldır okulumuzda İngilizce öğretmenliği yapmaktadır.1 yıl İngilizce hazırlık okuyan Alperen şu an 11.sınıfa geçen bir sayısal öğrencisidir.Birçok robotik yarışmaya katılan Alperen Robotex yarışmasında çizgi izleyenkategorisinde 1. olarak Estonyada düzenlenen yarışmada ülkemizi temsiletmiştir.Ayrıca 1.liseler arası iha yarışmasında finalede yarışmıştır.Emre 12.sınıfa geçen sayısal öğrencisidir. 1. Liseler Arası İHA yarışmasında finaledeyarışmıştır.Yusuf ERKOÇYusuf 9. sınıf öğrencisi olup, 3D tasarım programlarında tecrübelidir.Halil İbrahimAYGÜN1 yıl İspanyolca hazırlık okuyan Halil şu an 11. sınıfa geçen eşit ağırlık öğrencisidir. Birçok robotik yarışmaya katılmış olan Halil, Robotex yarışmasında çizgi izleyenkategorisinde 1. olarak Estonya’da düzenlenen yarışmada ülkemizi temsil etmiştir.Alperen ÖZALPTablo 26
2.2 Zaman Akış ÇizelgesiTablo 3’te planlanan zaman çizelgesi verilmiştir.Noİş PaketleriKimler Tarafından Yapılacağı1Görev analizi ve LiteratürTaramasıTüm Takım Üyeleri2Görev DağılımlarıAlperen ÖZALP3BoyutsalParametrelerininAlperen ÖZALP4Tasarımın yapılmasıYusuf ERKOÇ5Malzeme SeçimleriAlperen ÖZALP67Kavramsal RaporHazırlanmasıÖn iranTemmuzAğustosEylülTüm Takım ÜyeleriTüm Takım Üyeleri8İlk ÜretimTüm Takım Üyeleri9Yazılımın hazırlanmasıM. Emre KOCAMAN10Detaylı RaporunHazırlanmasıTüm Takım Üyeleri11Uçuş VideosuTüm Takım Üyeleri12Görev Test UçuşlarıTüm Takım Üyeleri13YarışmaTüm Takım Üyeleri14Proje YönetimiAlperen ÖZALPTablo 37
3. DETAYLI TASARIM3.1 Tasarımın Boyutsal ParametreleriAracı oluşturan tüm komponentlerin adet ve ağırlıkları tablo 4 te verilmiştir.NoParça AdıAğırlık (gram)AdetToplam Ağırlık(gram)1Alt Gövde10911092Üst 066GPS Tutucu361367Aralayıcılar1.4811.286mm Vidalar0.4228.8910mm metri1811813Radyo Alıcı1.511.514Güç Modülü2012015Akım Kesici1311216Sigorta1111217Pixhawk 4 Mini37.2137.2184in1 ESC17.5117.5195V UBEC11120Yük Bırakma Sistemi76.5176.521Yük Bırakma Sistemi Kolu1511522Yük Bırakma Servosu1711723330 ml Su Şişesi (Yük)3501350TOPLAM1325.5Tablo 48
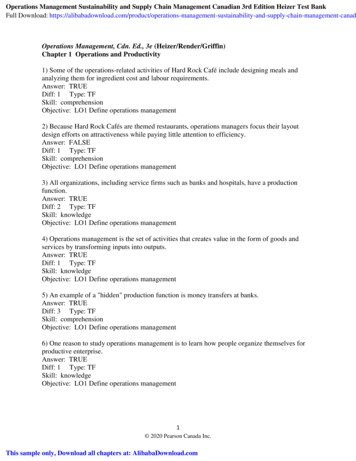
Aracın temel boyutları şekil 2’de verilmiştir.Şekil 2Aracın maksimum stabilitede olması için itki merkezi ile ağırlık merkezi çakışıkolcak şekilde komponentler yerleştirilmiştir.Bu komponentlerin yerleşimi tablo x tegösterilmiştir. Aracın x ve z eksenlerinde paralel olarak yerleştirilen motor, pervane ,aralayıcılar ,aralayıcı vidaları; ağırlık merkezine yerleştirilen kontrol kartı ,esc ,pil ,yükbırakma mekanizması ve yük ;ağırlık merkezini değiştirmediği için tabloda verilmemiştir.No123456789Parça AdıGPSGPS TutucuTelemetriRadyo AlıcıGüç ModülüAkım KesiciSigorta5v UbecYük Bırakma ServosuAğırlık(gram)10636181.52013111.517X uzaklığı(mm)-54-54-55-74397542320Z uzaklığı(mm)0000000046Y uzaklığı(mm)13017-24-15-14-25-20-25-43Tablo 59
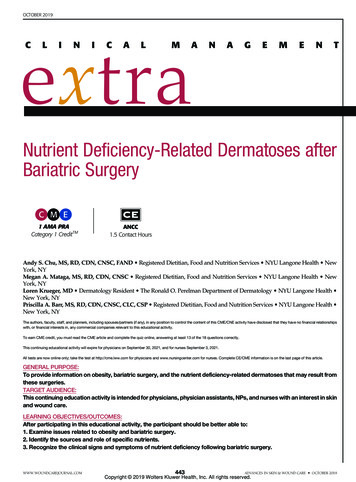
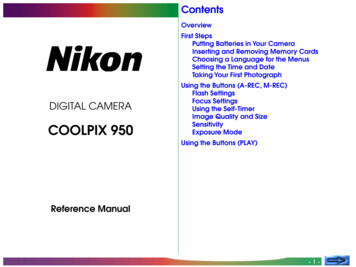
Bu yerleşim sonucunda ağırlık merkezi yüksüz durumda itki merkezinden yekseninde 8mm yukardadır. Z ve x ekseninde ise çakışıktır. Yüklü durumda ise x , y vez eksenlerinde çakışıktır.3.2 Tasarımın Yapısal Özellikleri3.2.1 Gövde, Mekanik SistemlerTablo 5’de gövde konfigürasyonları karşılaştırılmış ve quadcopter evra KabiliyetiÜretim ZorluğuMaliyetGüvenlikYük Taşıma 50Tablo 6Şekil 3’te gösterildiği gibi ,X,H,HX gibi gövde türleri vardır.HX gövde türünün hemhareket kabiliyetinin fazla olması hem de kullanılacak elektronikler için diğerlerinenazaran daha fazla alan sunmasından ötürü seçilmiştir.Şekil 3Aracın gövde ve kolları şekil 4’teki gibi ayrı biçimde kestirilip daha sonradanbirleştirilebilir. Bu yöntem gövde onarımı ve mali açıdan avantajlı olsa da gövdenin şekil5’teki gibi yekpare bir şekilde kestirilmesi ağırlık, sağlamlık, tasarım ve üretim kolaylığıaçısından avantaj sağladığı için yekpare gövde olarak üretildi.10
Şekil 4Şekil 5Aracımız ana üretim malzemesi, piyasada kullanılan malzemelerin yoğunluk,dayanım, üretim zorluğu ve mali açısından karşılaştırılarak karbon fiberin diğerlerinegöre avantajlı olmasından ötürü seçildi. Malzemelerin karşılaştırılması tablo 7’deverilmiştirÖzelliklerKatsayıKarbon k551352Üretim Zorluğu224222Maliyet3242235045304543ToplamTablo 7Gövde karbon fiber plakadan üretilecektir. Karbon fiber örgü türü olarak ençok kullanılan 2 çeşidi örgü vardır twill örgü ve plane örgü. İkisi arasında marjinal bir farkolmasa da twill örgünün daha az esneme yapmasından dolayı tercih edildi.Aracımızın tasarımı solidworks üzerinden yapılmıştır. Tasarım dwx formatı ileCNC router da kesilmiştir. CNC en ince ucu 1mm olduğundan ötürü tasarımda 1mmdendaha küçük detay bulunmamaktadır.Aracımızın alt plakası 5mm plakadan kesildi. Alt plakaya dahil olan kollarıngenişliği ise 12 mmdir. Solidworks üzerinden statik analiz yapılarak gerçekte gelecekolan yükün 1.5 katı verilerek statik analiz yapıldı. Analizle gövdeye yük binmeyenyerlere ağırlığı azaltmak için boşaltmalar yapıldı. Analiz ve malzeme özellikleri şekil6’verilmiştir.11
nımı775MpaSıkıştırmadayanımı475 MpaBükülmemukavemeti725 MpaEğilmeModulü60 GpaŞekil 63.2.2 Aerodinamik ÖzelliklerPervaneler AA*BB*C şeklinde isimlendirilir. AA pervanenin uçtan uca inçbiriminde uzaklığı ,BB pervanenin bir dönüşünde kat ettiği inç biriminde mesafe, C isepervanenin yaprak sayısını ifade eder. Araçta kullanılacak olan pervane ,motor boyutlarıve gövdenin izin verdiği boyutlar göz önünde bulunarak seçildi. Burada öncelikle gövdeboyutu belirlendi. Daha sonra gövdeye göre pervane, pervaneye göre de motor ölçüleribelirlendi. Genel on kabul olarak piyasada gövde ölçüsüne göre kullanılan motor vepervane ölçüleri tablo 8’de verilmiştir.Gövde BoyutuPervane ÖlçüsüMotor BoyutuKv Değeri150mm ya da daha3" ya da daha1105-1306 ya da daha3000kv ya da 806.51200kv-1600kv8",9",10" yada26XX ya da daha1200kv ya da dahadaha büyükbüyükdüşük450mmTablo 812
Araçta 7 inç pervane kullanılacaktır. Pervaneler 2,3 hatta 4 yapraklıolabilmektedir fakat piyasada en çok 2 ve 3 yapraklı pervane kullanılmaktadır.Pervanenin yaprak sayısının artması daha fazla itki üretirken daha fazla sürtünme vesürüklemeye sahip olduğu için daha az verimliliğe sahiptir. Araç için itkinin önemiverimlilikten fazla olduğu için 3 yapraklı pervane tercih edildi.Pervanenin hatve değeri arttıkça daha fazla hava iterek daha fazla itki sağlarbuda maksimum hızı artırır fakat bu daha küçük hatveli pervaneler göre daha fazla güçharcatır. Düşük hatveli pervanelerde ise iteceği hava azalmasın karşın torku artmaktadırbuda hızlanmayı iyleştirir. Tablo 9’da iki farklı hatve değerine sahip 7*3.5*3 pervane ve7*4*3 pervanenin brotherhobby 2806.5 1300kv motor ve 6s lipo ile test değerleriverilmiştir ve araçta yüksek hatveli 7*4*3 pervane seçildi.30002500İTKİ 53075011301430186522102360Gaz kolu(%)7*3.5*37*4*3Polinom. (7*3.5*3)Polinom. (7*4*3)Tablo 93.2.3 Görev Mekanizması SistemiBırakma mekanizması ve mekanizma kapağı pla malzemeden 3d yazıcı ilebasıldı. Basılan mekanizma plastik kelepçe ile gövdeye bağlandı. Kapağın açılıpkapanmasını servo motor ile yapıldı.Servo motor mekanizmadaki yuvasına oturtulupsıcak silikon ile sabitlendi. Bırakma mekanizmasının kolunu, servo koluna vida ilebağlandı. Servonun yanında plastik servo kolu gelmektedir. Sağlamlığı artırmak için13
plastik servo kolu yerine alüminyum servo kolu kullanıldı. Görev mekanizmasına maillebelirtilen 174 mm uzunluğunda 58mm genişliğinde 330 mllik su şişesi havasıcaklığından genleşme ve büzülmesi de göz ününde bulundurularak rahatlıktagirebilmekte ve kaplı konumda iken herhangi bir şekilde düşmemekte açık konumda iserahatlıkla düşmektedir. Görev mekanizmasının açık ve kapalı görüntüsü şekil 7’degösterilmiştir.Şekil 7Yükün zarar almadan istenilen alana inmesi için paraşüt ve iple bırakmak üzere 2yöntem düşünüldü tablo 10’daki karşılaştırma sonucu paraşüt seçildi.MaliyetBırakmaSüresiHasar OranıToplamKatsayı1Paraşüt Sistemi4İp ile Bırakma25514341423Tablo 10Farklı türlerde paraşütler bulunmaktadır tablo 11’deki karşılaştırma sonucundadaire paraşütün kullanılmasına karar atsayıKubbe ParaşütKare Paraşüt2541334252422Tablo 1114
Paraşütün ana malzemesi olarak büyük çöp poşeti kullanıldı. İp olarak ise rahatlıklabükülebilen ince kopmayan örgü ip kullanıldı. Paraşütümüzün çapı 25cmdir.İpler paraşüte koli bandı yardımı ile yapıştırılıp tek noktada birleştikten sonra şişeninkapağının altındaki boğuma düğümlenmektedir.1. görevde önceden pist güzergahının GPS ile koordinatları alınıp missionplanner üzerinden uçulacak rota belirlenecektir. Yükümüz araca yüklendikten sonraönceden içine yüklenen rotayı izleyip görevi tamamlanacaktır.2. görevde ise yine önceden izlenecek rota ve yükün bırakılacağı alanınkoordinatları alınacaktır. Önceden içine yüklenen rota takip edilerek yükün bırakılacağıalana gelip DO GRIPPER komutu 1 yapılarak mekanizmanın kapağı açılacak ve yinebu komut 0 yapılarak kapak kapanacaktır ve bitiş çizgisini geçip iniş yaparak görevtamamlanacaktır.3.2.4 Elektrik Elektronik Kontrol ve Güç Sistemleri EntegrasyonuAraçta öncelikle uçuş kontrol kartı seçildi. Kart seçilirken boyutlarına , işlemgücüne , içerisindeki sensörlere ve yeterli giriş çıkışa sahip olmasına dikkat edilmiştir.Bunun sonucunda en uygun kartın holybro pixhawk 4 mini olduğuna karar verildi.Yarışmada en çok puana sahip olan kriter yükün hedefe doğru bırakılması busebepten ötürü en önemli parçalardan biri gps. Gpslerin içerisinde kullanılan modüllerkarşılaştırıldığında m8n 2.5 metre, m9n 2 metre , f8p standart olarak 2.5 metre ve rtk ile25 cm, f9p ise standart olarak 1 metre rtk ile 10 cm pozisyon doğruluğuna sahiptir.Aracımızda f9p modülünü kullanan holybro h rtk gps kullanılmasına karar verildi. Gpsmodülünün yenileme hızı 20 hz ye kadar çıkmaktadır bu bize yüksek hızlarda güvenli birşekilde otonom uçmamıza olanak sağlar. Rtk özelliğini kullanabilmemiz için arca takılangps in yanı sıra yer kontrol istasyonuna da yer modülünün takılması gerekmektedir. Yermodülü açık olarak bekletilmesi hassasiyeti artırmaktadır bu yüzden uçuş yapmadan 1saat önceden yer modülü çalıştırılacaktır. Ayrıca aracımız yönünü bulmak için pusula15
kullanmaktadır. Kontrol kartı aracın merkezinde olduğu için yüksek akım geçen kablolargibi manyetik kirlik yaratan şeylerden etkilenerek yanlış sonuç verme olasılığındandolayı kartın içerisindeki pusula iptal edilerek gpste bulunan pusula kullanılacaktır. Gpsüzerindeki pusulanın minimum derecede manyetik parazitlerden etkilenmesi için aracınmümkün olduğunca üzerinde konumlandırılmıştır.Kullanılacak olan kumdan Radiomaster tx16s alıcı ise FrSky R-XSR Ultradır.Alıcımız sbus protokolüne sahiptir bu sebepten ötürü kontrol kartının sbus girişinebağlandı.Aracın kalibrasyon, parametre değişimi, konum ve yükseklik bilgilerinin gibi anlıkbilgiler, otonom rotanın yüklenmesi gibi şeyleri kablo bağlantısı olmadan yer kontrolistasyonundan yapmak için telemetri kullanılmaktadır. 915 mhz türkiyede yasak olduğuiçin 433mhz iletişim bandına sahip olan 1000mw yrc telemetri seçilmiştir. Telemetrininmw artması iletişim mesafesini artırmaktadır.Fırçasız motorların fırçalı motorlara göre fazla tork ,hız, elektriksel gürültümeydana getirmeme, sessiz çalışma, uzun ömürlü ve bakımları kolay olduğundanfırçasız motor kullanıldı. Fırçasız motorların boyutları aabb şeklinde gösterilir aamotorun statör çapını mm cinsinde vermektedir.bb ise statör boyunu mmm cinsindeifade etmektedir. Statör çapının artması düşük devirlerdeki torkunu boyunun artması iseyüksek devirlerdeki torkunu artırmaktadır. Düşük devirlerde torkun fazla olamsıdönüşleri hızlı ve keskin bir şekilde yaptıracağından ötürü yüksek statör çapına sahipolan motor seçilmiştir.Kullanılacak motor brotherhobby 2806.5 1300kv fırçasız motordur.Pil olarak lityum iyon, lityum polimer gibi seçeneklerden anlık olarak yüksek ampervermesinden dolayı lipo pil kullanılacaktır. Lipo olarak 100c devamlı, 200c anlık akımverebilen CNHL 6s 1300mah lipo, istenilen voltaj ve gerekli uçuş süresini verebildiğindendolayı kullanılacaktır. Liponun yüzde 80 verimlilikte verebileceği anlık akım değeri;formülüyle sürekli 104 amper, anlık 208 amper verebileceği hesaplanmıştır.16
Motorlarımızın hızını kontrol etmek için ESC (elektronik hız kontrolcüsü)kullanıldı. Tekli ve 4in1 olmak üzere 2 tür ESC vardır. Pdb ihtiyacını ortadan kaldırdığıkabloların azalmasından ötürü manyetik parazitin tekli esclere göre az olduğu vemaliyetinin daha uygun olmasından ötürü 4in1 ESC kullanıldı. 6s destekleyen veESC’nin desteklediği maksimum akım değeri motorun çekeceği akımın güvenlikkatsayısı nedeni ile yüzde 20 fazlası olmalıdır. Bunun sonucunda T-motor f55a pro 2ESC seçilmiştir. Blheli32 yazılımını desteklediği için motorların ters çevrilmesi gibişeyleri yazılım üzerinden kolaylıkla yapılabilmektedir. ESC de dshot 1200e kadar olanprotokoller bulunmaktadır. Biz şuan en stabil ve hızlı çalışan dshot600 protokolünükullanacağız ve bu protokol sayesinde ESC kalibrasyonu ihtiyacı ortadan kalkmıştır.Pixhawka güç vermek ve pilden çekilen akım ve voltajı görebilmek için holybropm02 v3 güç modülü kullanılmaktadır.Yük bırakma mekanizmasını açılıp kapanmasını sağlayacak olan servo analoğagöre yüksek hassasiyete sahip olması, yüke daha iyi karşı gelmesi, motorun yönü,merkezi, hareket sınırları, hareket hızı, hareket toplam açısı gibi özellikler programlamaile ayarlanabilmesinden ötürü dijital servo kullanıldı. Seçilen emax 3054 dijital servo 3.5kg zorlanma torku ile yükümüzü rahatlıkla taşıyabildiği için seçildi.Servomuza bağlayacağımız main out 8 girişine pixhawk içerisinden güçverilmediği için harici olarak 5v 3a lik ubec ile main out hattının 5v ve toprak hattıbeslenecektir.Yarışmadan olabilecek en yüksek puanı alabilmek için otonom uçulacaktır.Otonom uçuş özeliği ardupilot yazılımı ile kazandırılacaktır. Ayrıca bu yazılım ile birlikteyer kontrol istasyonu olarak misseon planner kullanılacaktır. Ardupilot yazılımınkullanmamızdaki sebep kontrol kartımızla uyumlu , yazılımın stabil ve isterlerimizeuygun çalışmasıdır. Ayrıca uzun zamandır piyasada olduğu için oluşturduğu topluluksayesinde yaşanılan herhangi bir sorunun çözümünü internette kolaylıklabulunmaktadır. Aracımızla yer kontrol istasyonunu misseon planner üzerinden telemetriile bağladıktan sonra öncelikle gövde türü seçilmiş ardından accel kalibrasyonumaksimum doğrulukta olması ile su terazisi ile kalibrasyonu yapıldıktan sonra manyetikalandan mümkün olduğunca uzaklaşıp olabilecek tüm eksenlerde aracı çevirerek pusula17
kalibrasyonu yapılıp kumanda kalibrasyonunu yaparak aracımızı uçuşa hazır halegetirdik. Kumanda ile aracın bağlantısının kesilmesi gibi acil durumlarda duruma göreeve dön yada bulunduğu yere inmesini sağlayacak olan fail safe ayarlandı. Mükemmelbir uçuş performansı için Autotune ile pid ayarları ayarlandı. Sırası ile stabilize ,altitudehold ,loiter, RTL ve auto mod test edilmiştir. Bunun sebebi manuelden otonoma doğrutest ederek aracımızdaki olası bir arızanın tespitinin kolaylaşmasıdır.Otonom görevelrinyapılması için misseon planer üzerinden izlenecek rota yük bırakılacağı alan dışındaspline way point ile çizilmiştir. Spline way point kullanılmasındaki sebep gidilecek yoluradiuslayarak aracın hızı kesmeden kolayca rotayı tamamlanmasıdır.Acil durumlarda istenilenden fazla akım çekilmesi durumunda sigorta yardımı ilearacın gücü kesilmektedir bunun yanı sıra manuel olarak akımı kesebileceğimiz akımkesicide bulunmaktadır. Araçta motorlar ve elektronikler ile birlikte yaklaşık 180 amperakım çekmektedir bu değerin yüzde 10 fazlası kadar akıma izin veren 200 ampersigorta kullanıldı. Akım kesici olarak pozitif hattına seri bir şekilde dişi xt-60 lehimlendi.Artı ve eksi hattı birbirine kısa devre olacak şekilde lehimlenen erkek xt-60ın dişi xt-60 atakılması ile akım açılmış çıkarılarak da akım kesilmektedir.3.3 Uçuş Performans ParametreleriŞekil x te 1. görev şekil x te ise 2. görev için izlenecek rotanın planı yarışmaşartnamesinden alınarak verilmiştir.Şekil 7Şekillerde yola çıkılarak f 1 formülü ile 1. Görev için f 2 formülü ile 2. Görev içinkat edilecek tahmini mesafe verilmiştir.18
𝐹𝐹1 1. 𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖 2 (40 35 40 28 40 35 50) 516𝐹𝐹2 2. 𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖 2 (40 35 80 35 40) 460Tablo 12’de 1. Ve 2. Görev için öngörülen uçuş performans parametreleriverilmiştir.Görev Performans ParametreleriKalıkış AğırlığıOrtalama Uçuş HızıMaksimum HızTaşınan YükUçuş ModuKat edeceği MesafeTamamlayacağı 6 23 saniyeTablo 12Şekil 13’de brotherhobby 2806.5 1300kv fırçasız motorun hqprop 7*4*3 pervaneile yapılmış itki testi verilmektedirGaz 803.1812.5392.270Tablo 13Aracımız her iki görev içinde ortalama yüzde 65 güç ile 20 metre/saniye hızındatamamlanması planlanmaktadır. Bu güçte iken uçuş süresi f3 formülü ile ve havada asılıkalış süresi formül 3 te gösterildiği gibi ��𝑃𝑃𝑃𝑃𝑃 𝑄𝑄𝑝𝑝𝑝𝑝𝑝𝑝 ��� 𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎)𝐹𝐹3 ��𝑟𝑟 𝑄𝑄𝑝𝑝𝑝𝑝𝑝𝑝 𝑉𝑉𝑉𝑉𝑉𝑉𝑉𝑉𝑉𝑉3 0,8 60 1, 60 𝑎𝑎𝑎𝑎𝑎𝑎60,419
𝐹𝐹4 ��𝑟𝑟𝑟 𝑄𝑄𝑝𝑝𝑝𝑝𝑝𝑝 𝑉𝑉𝑉𝑉𝑉𝑉𝑉𝑉𝑉𝑉3 0,8 60 1, 60 �𝑎𝑎𝑎𝑎𝑎𝑎9.2Aracımız yüzde 65 güçte 20 metre bölü saniye ile kat edebileceği maksimum mesafeformül 5 te ���𝐻𝐻𝐻(𝑣𝑣ℎ𝚤𝚤𝚤𝚤 ) ���ü𝑟𝑟𝑟𝑟 ) 63𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠5 ��𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖 𝑣𝑣ℎ𝚤𝚤𝚤𝚤 𝑡𝑡𝑠𝑠ü𝑟𝑟𝑟𝑟 1.26𝑘𝑘𝑘𝑘Hesaplamaların sonucunda 1300mahlik bir pillin görevler için yeterli fazlasınınağırlığı artırarak alacağımız puanı düşüreceğine karar verildi.3.4 Hava Aracı Maliyet DağılımıAracımızı oluşturan elektronik ve yapısal malzemelerin maliyeti tablo meHolybro Pixhawk 4 MiniHolybro PM02 v3 Güç ModülüHolybro H-RTK f9p Rover LiteHolybro h rtk f9p Base ModülBrotherHobby 2806.5 1300kv MotorHQProp 7.0*4.0*3 4 lü PervaneTakımıT-Motor f55a Pro 4in1 ESCRadimaster TX16s KumandaFrsky R-XSR Radyo AlıcıEmax 3054 17gr Dijital ServoYrc 433mhz 1000mw TelemetriSigortaKablo ve KonnektörlerCNHL 1300mah 6s Lipo50cm*50cm 5mm Karbon Fiber Plaka25cm*25cm 2mm Karbon Fiber PlakaToplam FiyatBirim Fiyatı(TL)144320034313985270Adet11115Toplam 110030016905Tablo 1420
4. PROTOTİP ÜRETİM SÜRECİ4.1 İHA İmalat ve Montaj SüreciŞekil 7’de aracın imalat sürecinin fotoğrafları verilmiştir.Şekil 14.2 Elektrik Elektronik Entegrasyon SüreciŞekil 8’de aracın elektronik entegrasyon sürecinin fotoğrafları verilmiştir.21
Şekil 84.3 İHA Montaj ve Genel KontrollerAraçta yaşanacak olası kırımları minimuma indirerek malzemelerde oluşabilecekzararın maddi ve zaman olarak bizi etkilememesi için uçuş yapmadan önce kontroledilmesi gereken üretim süreci kontrol listesi hazırlanmıştır.Bu kontrol listesi tablo 15 deverilmektedir.Üretim SüreciLitaratür TaramasıGörev Gereksinimlerinin Belirlenmesi ve Kural AnaliziÜretim Malzemelerinin BelirlenmesiGövde Tasarımın YapılmasıYapılan Tasarımların AnaliziAnlize Göre Tasarım RevizyonuGövde İçin Plaka Kesimi 22
Gövde MontajıGörev Mekanizması TasarımıGörev Mekanizması ÜretimiGörev Mekanizmasının Araca MontajıElektirik ve Elektronik Parçaların Yerleşimi ve SabitlanmesiKablolamaların YapılmasıYazılımın YüklenmesiKalibrasyonların YapılmasıArac Göre Uygun Parametrelerin Değiştirilmesi Tablo 1523
4.4 Üretim İş Zaman Çizelgesi Planlanan ve GerçekleşenTüm dünyayı etkileyen pandemi koşullarından ötürü özellikle üretime geçtikten planlanan tarihlerde gecikme yaşanmasınarağmen DTR son tarihinden önce iki görevde dahil olmak üzere her şey tamamlanmıştır ve geliştirmeye devam etmekte.Noİş PaketleriKimler Tarafından Yapılacağı1Görev analizi ve LiteratürTaramasıTüm Takım Üyeleri2Görev DağılımlarıAlperen ÖZALP3BoyutsalParametrelerininAlperen ÖZALP4Tasarımın yapılmasıYusuf ERKOÇ5Malzeme SeçimleriAlperen ÖZALP67Kavramsal RaporHazırlanmasıÖn iranTemmuzAğustosEylülTüm Takım ÜyeleriTüm Takım Üyeleri8İlk ÜretimTüm Takım Üyeleri9Yazılımın hazırlanmasıM. Emre KOCAMAN10Detaylı RaporunHazırlanmasıTüm Takım Üyeleri11Uçuş VideosuTüm Takım Üyeleri12Görev Test UçuşlarıTüm Takım Üyeleri13YarışmaTüm Takım Üyeleri14Proje YönetimiZafer KaragözPlanlanan Süre Gerçekleşen Süre 24
5. TEKNİK ÇİZİMLERBu bölümde aracın görselelri ve elektronik şema verilmiştir25
26
27
28
29
30
biriminde uzaklığı ,BB pervanenin bir dönüşünde kat ettiği inç biriminde mesafe, C ise pervanenin yaprak sayısını ifade eder. Araçta kullanılacak olan pervane ,motor boyutları . 210mm 5" 2205-2208,2305-2306 2300kv-2600kv 250mm 6" 2206-2208,2306 2000kv-2300kv 350mm 7" 2506-2806.5 1200kv-1600kv 450mm 8",9",10" yada daha büyük .