Transcription
NREL/CP-5400-70868. Posted with permission. Presented at WCX18: SAE World Congress Experience, 10-12 April 2018, Detroit, Michigan.2018-01-1181Published 03 Apr 2018Influences on Energy Savings of Heavy TrucksUsing Cooperative Adaptive Cruise ControlBrian McAuliffe National Research Council CanadaMichael Lammert National Renewable Energy LaboratoryXiao-Yun Lu and Steven Shladover University of California-BerkeleyMarius-Dorin Surcel FPInnovationsAravind Kailas Volvo GroupCitation: McAuliffe, B., Lammert, M., Lu, X.-Y., Shladover, S. et al., “Influences on Energy Savings of Heavy Trucks Using CooperativeAdaptive Cruise Control,” SAE Technical Paper 2018-01-1181, 2018, doi:10.4271/2018-01-1181.AbstractAn integrated adaptive cruise control (ACC) and cooperative ACC (CACC) was implemented and tested onthree heavy-duty tractor-trailer trucks on a closed testtrack. The first truck was always in ACC mode, and the followerswere in CACC mode using wireless vehicle-vehicle communication to augment their radar sensor data to enable safe andaccurate vehicle following at short gaps. The fuel consumptionfor each truck in the CACC string was measured using the SAEJ1321 procedure while travelling at 65 mph and loaded to a grossweight of 65,000 lb, demonstrating the effects of: inter-vehiclegaps (ranging from 3.0 s or 87 m to 0.14 s or 4 m, covering amuch wider range than previously reported tests), cut-in andcut-out maneuvers by other vehicles, speed variations, the useof mismatched vehicles (standard trailers mixed with aerodynamic trailers with boat tails and side skirts), and the presenceof a passenger vehicle ahead of the platoon.The results showed that energy savings generally increasedin a non-linear fashion as the gap was reduced. The middletruck saved the most fuel at gaps shorter than 12 m and thetrailing truck saved the most at longer gaps, while lead trucksaved the least at all gaps. The cut-in and cut-out maneuvershad only a marginal effect on fuel consumption even whenrepeated every two miles. The presence of passenger-vehicletraffic had a measurable impact. The fuel-consumption savingson the curves was less than on the straight sections.Keywordsadaptive cruise control (ACC), cooperative ACC (CACC),heavy-duty truck platooning, heavy-duty truck partialIntroductionCruise Control (CC) has been in use for several decadesfor automated vehicle control to assist the driver withspeed regulation without distance control. The driverremains responsible to maintain a safe distance with respectto any forward vehicles. Adaptive Cruise Control (ACC) usesa radar or lidar (laser radar), and sometimes with the additionof a video camera, to add relative distance and relative speedcontrol. Some passenger cars and heavy-duty trucks arecurrently equipped with this capability. The main problem forACC is that if three or more ACC vehicles are driven consecutively, the system is string unstable [1]. A string of ACC vehicleson highways is less stable than a string of manually drivenvehicles because the forward ranging sensors lack the abilityto perceive the actions of vehicles ahead of the immediatelypreceding vehicle. The larger and larger cumulative delaysautomation, vehicle control performance, heavy-duty truckfuel economywith the addition of greater numbers of vehicles to the stringincreases the unstable behavior. To solve this problem, cooperative ACC (or CACC) with V2V (vehicle-to-vehicle wirelesscommunication) is a possible solution. With CACC, the simultaneous wireless communications broadcast from the leadvehicle to all the followers effectively removes the cumulativedelay problem while the delay associated with the V2Vcommunication is sufficiently small that it can be ignored.In practice, the first vehicle of a CACC string can useACC mode to follow other manually-driven vehicles in publictraffic, or it can be driven manually. There are no specialresponsibilities or authority required for this leading vehicleor its driver. The second vehicle, and any subsequent vehicles,will be in CACC mode, assuming wireless communication ismaintained and if there are no inter-vehicle cut-ins by otherroad vehicles. Ad-hoc joining and leaving by vehicles, when 2018 SAE International; National Renewable Energy Laboratory; National Research Council Canada.
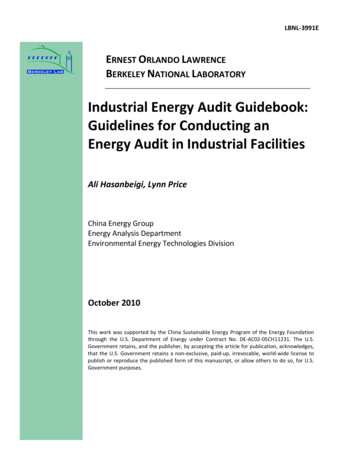
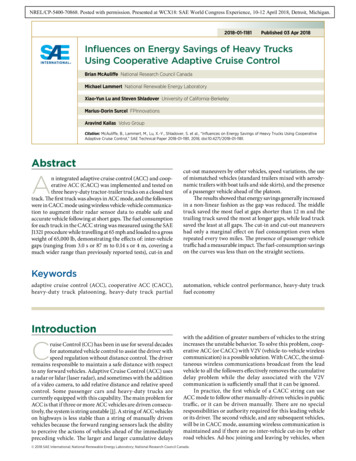
Downloaded from SAE International by Michael Lammert, Tuesday, April 24, 20182Influences on Energy Savings of Heavy Trucks Using Cooperative Adaptive Cruise Controltheir drivers choose to do so, is accommodated without theneed to request permission. A CACC string is controlled basedon a constant time gap, similar to human drivers, which differsfrom the constant-distance following used in closely-coupledplatoon systems.ACC and CACC have the same control structure: anupper level control that is based on the kinematic relationshipfrom the desired distance and speed to the desired acceleration/deceleration, and a lower level control is from the desiredacceleration/deceleration to the desired engine/brakingtorque. The feedback-control design needs to guarantee fastresponse and stability for each individual vehicle and tomaintain practical string stability (to be defined later) as awhole CACC string. The concept is designed to co-exist withconventionally-driven vehicles without requiring physicalsegregation from other traffic. The control system on eachvehicle therefore also needs to handle interactions with othervehicles such as following other manually-driven vehicles,and responding to cut-in and cut-out maneuvers between theCACC vehicles.An automated vehicle following a vehicle that lacks V2Vcommunication capability can operate in ACC mode. Anintegrated ACC and CACC design is advantageous, as initiallyproposed by Lu et al. [2]. The pioneering CACC developedand implemented on four passenger cars, and field tested inpublic traffic, was presented by Milanés et al. [3]. The CACCwas shown to have faster response and smaller speed anddistance tracking errors than ACC control for the trailingvehicles. Follow-on work on modeling and simulation byMilanés and Shladover [4] indicated that a simple model representing a first-order lag response can be used to approximatethe feedback loop of CACC.The CACC concept has been applied to a set of three heavy-duty vehicles, forming the basis for the current work.Results from a separate closed-track fuel-economy test of thisthree-truck CACC system have been previously reported [5].In that work, the minimum separation time tested was 0.6 sthat corresponds to a separation distance of 17.4 m at the speedof 105 km/h (65 mph). A second set of closed-track f uel-economytests have been undertaken, forming the basis for the currentpaper. For this second test campaign, the shortest time gaptested was 0.14 s corresponding to a distance gap of 4 m.The ACC and CACC feedback control share the same longitudinal control structure, which has been used by the CACCdevelopers for many years [6, 7]. The upper level control isbased on linear kinematics from distance and speed trackingerrors to desired acceleration. The linear model is independentof vehicle type and size, and therefore many legacy or complexcontrol design methods can be re-used and easily implemented.The inputs for upper level control are speed and accelerationof the lead vehicle and the immediately preceding vehicle, anddistance measured to the preceding vehicle by remote sensorssuch as radar or lidar, that may be fused with video. The maincontrol task has three aspects: (a) to track a synthetic speed ofthe lead and preceding vehicle and to maintain a properdistance to the preceding vehicle; (b) to maintain robuststability of the feedback control for speed tracking and distancetracking for (a); and (c) to render the overall system practicallystring stable in the following sense: for any external disturbances or uncertainty from the road, for any measurementerrors from the sensor, for temporary communication packetdrops, or for delays from the sensors and the control actuator,the overall system including all trucks in the CACC stringneeds to be robustly stable; and the robustness bandwidth mustbe sufficiently high to handle other vehicles cutting in andcutting out between any trucks in the CACC string.Lower Level ControlThe lower level control maps the desired acceleration/deceleration to the desired net engine torque or braking torque. Thisimplicitly requires that the engine torque be commandedthrough the CAN Bus. This control execution requires a functional relationship which consists essentially of aninverted-vehicle-driveline-dynamics model in the followingsequence: wheel acceleration driveshaft torque finaldriving gear propeller shaft differential transmission(gear box) engine output shaft (as shown in Figure 1 of Luand Shladover [7]). The braking torque is shared by the engineand foundation (pneumatic or service) brakes. The physicalprinciple of the engine brake, or engine retarder, is to use theSchematic of a three-vehicle HDV platoon SAE InternationalFIGURE 1Upper Level Control 2018 SAE International; National Renewable Energy Laboratory; National Research Council Canada.
Downloaded from SAE International by Michael Lammert, Tuesday, April 24, 2018Influences on Energy Savings of Heavy Trucks Using Cooperative Adaptive Cruise Controlcompression stroke without fueling to generate a brakingtorque, which has a much faster response than the servicebrake. Engine braking tends to have lower braking torque asthe engine speed decreases. Therefore the engine brake is usedfor vehicle following most of the time. The foundation brakeis used instead for emergency situations or stopping, whichrequires a high level of braking torque.This lower-level control required detailed modeling ofthe driveline dynamics, and generally requires informationfrom the vehicle manufacturer. If the non-linear relationshipbetween the desired acceleration and the desired torque isknown, the control design uses a feedback linearizationapproach.One of the differences between the control strategiesemployed by ACC/CACC and platooning is in the vehicle-following definition. ACC/CACC uses a constant timegap that is inherited from common human driver behavior.Platooning uses a constant distance gap. Under constant-speedtesting, as was undertaken for most of the fuel-economy testeddescribed in this paper, time gap control is consistent withdistance gap control from the perspective of energy savingsdue to aerodynamic drag reduction, as describe in the followingsection. However, for other maneuvers such as adapting tovehicle cutins and cut-outs, or speed variations, the distancegap changes as the vehicle speeds change.Energy SavingsA potential benefit of ACC/CACC and platooning is the energysavings that are possible for scenarios in which the multiplevehicles can safely travel in close proximity. This has beenpreviously highlighted by numerous studies investigatingthe potential benefits of truck platooning, many of which wereevaluated using constant-speed testing and are thereforeequivalent to the CACC scenarios tested in the current work.Therefore, the physics associated with the energy savings ofthese two concepts is largely the same. The energy-savingsdiscussions throughout this paper will interchangeably usethe terms platooning and CACC to describe the energy savingsof these systems. Based on previous investigations, the fuelsavings associated with vehicle platooning and close-proximitydriving has been attributed to an aerodynamic influence.Wind-tunnel studies [8, 9, 10] and track-based fuel-economystudies [11, 12, 13, 14, 15, 16, 17, 18, 5, 19] have identified trendsin aerodynamic drag reduction associated with vehicles in closeproximity and linked them to the resulting fuel savings, whereascomputational studies [20, 21, 22, 23, 24, 25, 17, 26, 27] haveprovided the insight on the aerodynamic mechanisms that leadto these beneficial effects. McAuliffe et al. [5] provide a literaturesurvey of aerodynamic and fuel-consumption studies pertinentto truck platooning, from which it has been inferred that thereare two dominant aerodynamic phenomena that lead toreduced drag and fuel consumption. Figure 1 identifies these drag-reduction mechanisms. The air-wake shed from a leadingvehicle provides a region of lower airspeed, relative to thefollowing vehicle, that results in lower aerodynamic drag overthe front surfaces of the trailing vehicle. As a vehicle propelsitself through the air, a region of high pressure is generated overits front surface due to stagnation of air over these areas, with3a corresponding increase in static air pressure. This high-pressure region emanates forward of the vehicle and, when sufficiently close to another vehicle, increases the base pressure onthe forward vehicle, essentially giving it a push. As highlightedby the literature survey of McAuliffe et al. [5], the magnitudeof these two effects are influenced by the separation distance,the truck configuration, and the operational environment inwhich the vehicles are evaluated.In the first phase of fuel-economy testing of the currentCACC system, testing was performed for various three-truckplatoon configurations, including different aerodynamictrailer configurations (conventional dry-van trailers andtrailers outfitted with side-skirts and boat-tails), for variousseparation distances (17 m up to 43 m), for speeds of 89 km/hand 105 km/h, and for vehicle masses of 14,000 kg and29,400 kg. Results of the fuel economy testing showed that,for the range of test conditions examined, the net fuel savingsfor the full vehicle platoon was measured to be between 5%and 8% compared to three vehicles travelling independently,and in isolation, from of each other. The greatest fuel savingswere achieved at the shortest distance of 17 m. The aerodynamic trailer configuration experienced a greater fuel savingsthan the standard trailer, consistent with the computationstudy by Ellis et al. [24] for near-identical truck configurations.At all separation distances tested (17 m to 43 m), the trailingvehicles experienced the greatest fuel savings of the threevehicles, which is consistent with the three-truck-platoonstudy of Tsugawa et al. [16] at these separation distances. Forthe conditions tested by McAuliffe et al. [5], speed showed noappreciable effect on the percentage fuel savings, whereasweight reduction improved the percentage fuel savings.To date, most investigation have focused on the influenceof separation distance, with some studies evaluating vehicleconfiguration, weight and speed. The Test Plan section of thispaper identifies the specific investigations undertaken as partof the current work and how they each expand on the currentbody of knowledge surrounding the potential energy savingsof cooperative heavy-vehicle automation systems.Objectives of theCurrent WorkV2V-based cooperative heavy-vehicle systems are nearingcommercialization. However, there is a knowledge gap interms of the reliability and resiliency of these systems. Furthertesting and evaluation is required to help qualify and quantifytheir overall operational, safety, energy use, and environmental performance. Of particular interest in the currentstudy is the potential energy savings of such system.It is important to understand the energy saving benefitsthat can be achieved from operation of heavy trucks at smallerthan normal separation gaps for multiple reasons: To provide decision makers in the truck manufacturingindustry and their customers in the goods haulingindustry with authoritative data to support economicassessments of the benefits that they can gain from 2018 SAE International; National Renewable Energy Laboratory; National Research Council Canada.
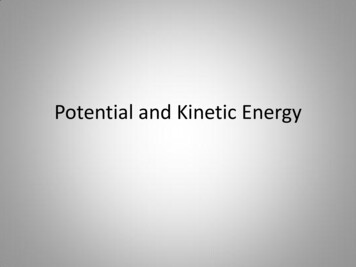
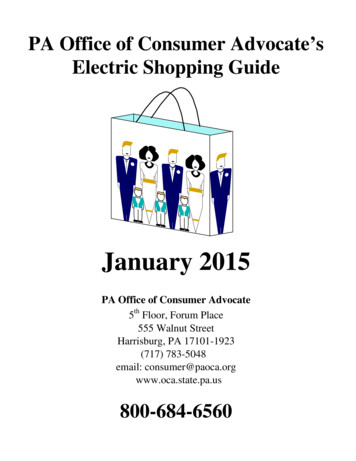
Downloaded from SAE International by Michael Lammert, Tuesday, April 24, 20184Influences on Energy Savings of Heavy Trucks Using Cooperative Adaptive Cruise Controlreducing their fuel costs, so they can make well-informeddecisions about investing in the technology;Communication (DSRC), calculates control commands(engine torque control, engine brake control, servicebrake control), detects and handles system faults, andsends the commands through the J-1939 bus forexecution. It also logs all the necessary data fordebugging and analysis. To provide public policy decision makers withinformation about the energy saving potential fromtruck platooning so that they can decide what incentivesto offer to encourage its adoption by industry,particularly relative to other energy savingstrategies; and Radar and video camera data are fused for front targetdetection and tracking. To provide more fundamental understanding of themechanisms of aerodynamic drag reductions associatedwith truck strings or platoons so that the best strategiescan be developed and trade-offs can be assessed amongdifferent design alternatives (such as gap selection). DSRC-based V2V communication system: The intervehicle communication is achieved by using 5.9 GHzwireless for 2-way communication. Antennas mountedon top of both side mirrors guarantee line-of-sightcommunications even if any of the trucks was turning. A laptop computer with Linux as the real-time operatingsystem for running high level scripts for processschedule handling of the central control computer forsystem development, debugging, and testing.Cooperative AdaptiveCruise Control System An emergency switch that will cut off the physicalconnection between the PC-104 computer and the J-1939Bus to force the system back to manual control.The overall system structure and components of the CACCare depicted in Figures 2 and 3. The implementation of theCACC system has the following components: A driver-vehicle interface display using a touch-screentablet was developed for the tests. It displayed necessaryinformation to the driver such as the total number ofvehicles in the platoon, relative position of the vehicle inthe platoon, DSRC status, driving mode of each vehicle(manual, ACC or CACC), service brake use status, andactual time gap used. It also allowed the driver to selectdrive mode (ACC or CACC) and their correspondingtime gaps. A central control computer (labelled as PC-104) that isan industrial-grade computer running the QNXreal-time operating system. It is the interface for all thecomponents connected to it. It reads all the onboardsensor data from the J-1939 Bus, receives informationfrom other vehicles through Dedicated Short RangeFIGURE 2 A 5 Hz GPS unit was used to assess the health of theDSRC signal independently of the inter-vehicledifference. This information was used in cases such asthe detection of other vehicle cut-in situations.CACC components. SAE InternationalTest PlanCACC structure.Vehicle Configuration SAE InternationalFIGURE 3Track testing was undertaken using the SAE J1321 Type II FuelEconomy procedure [28] to investigate the fuel-savings potential of the three-truck CACC system. This test program wasconducted to supplement a previous test program using thesame system [5]. The following sections describe test configurations and conditions and the motivation for testing.The previous fuel-economy testing with the CACC systemexamined the effect of vehicle speed (89 and 105 km/h, or 55and 65 mph), cargo weight (empty and 15,400 kg / 34,000 lbload), and trailer aerodynamics (standard compared to side-skirts and a boat-tail) on the potential fuel-savings benefitsfrom platooning. It was therefore decided to use one configuration for the majority of testing, with the following representingthe baseline configuration: Vehicle speed of 105 km/h (65 mph) Vehicle total mass of 29,500 km (weight of 65,000 lb) 2018 SAE International; National Renewable Energy Laboratory; National Research Council Canada.
Downloaded from SAE International by Michael Lammert, Tuesday, April 24, 2018Influences on Energy Savings of Heavy Trucks Using Cooperative Adaptive Cruise Control Same trailer make and model Trailers outfitted with side-skirts and a boat-tail (samemake and models as previous test campaign)This combination of vehicle speed and weight have alsobeen used in some two-truck track-based platooning studies[15, 19], and thus provides cases for comparison. With therecent implementation of greenhouse-gas regulations fortrailers in the U.S. [29], and similar regulations proposed forCanada [30], trailer aerodynamic devices such as side-skirtsand boat-tails are expected to become common equipmenton dry-van trailers over the next decade, providing justification that this aerodynamic trailer configuration is an appropriate baseline configuration for testing.For the testing conditions described in the following, thevehicle speed, weight, and trailer configuration representthose listed above, unless otherwise noted.Reference Test ConditionsThe SAE J1321 fuel-economy test procedure requires referenceruns to be conducted to assess the relationship of the fuel useof the test vehicles to that of the control vehicle under baselineconditions representing the vehicles in isolation [28]. Eightsuch measurement runs were conducted throughout the testprogram to continually monitor the consistency of the test-to-control-vehicle fuel consumption relationship.Repeatability MeasurementsThree of the test cases from the previous test campaign [5]were repeated as a verification exercise. Separation distancesof 17.4 m, 34.9 m, and 43.6 m were re-tested (time gaps of 0.6 s,1.2 s, and 1.5 s), covering the full range of separation distancespreviously tested with this CACC system. The intermediateseparation distance of 34.5 m was re-tested as a reference casefor some of the platoon variations discussed later.Shorter Separation DistancesBased on other truck platooning studies described in the literature [15, 16, 17], the CACC system was expected to experiencegreater levels of overall fuel savings at shorter distances thanwere previously tested with this system (previous minimumwas 17.4 m). In particular, it was recognized that distancesshorter than 17 m were likely required for the lead truck toexperience a fuel savings. It is unclear, however, whether thetrailing vehicle would experience increased or decreased fuelsavings at shorter distances, as the published literature has notdemonstrated consistent findings, as highlighted by the NACFEstudy [18]. The three-truck string/platoon was tested at closerdistances of 4 m, 6 m, 9 m, and 12 m, representing time gapsat 105 km/h of 0.14 s, 0.21 s, 0.31 s, and 0.41 s, respectively.Longer Separation DistancesThe longest separation distance tested previously with thethree-truck CACC system (43.6 m at 105 km/h) showed5significant fuel savings for the middle and trailing vehicles(6-10%), with a low decay rate with distance indicating thepossibility for measurable fuel savings at much larger distancesrepresentative of typical non-platoon highway traffic conditions. A computational study by Humphreys and Bevly [17]demonstrated reduced aerodynamic drag for the trailingvehicle of a two-truck platoon at distances up to 152 m. It wastherefore decided to undertake testing at larger separationdistances of 58.1 m and 87.2 m, corresponding to time gapsof 2.0 s and 3.0 s at 105 km/h to characterize what vehiclesmay already be experiencing on the road.Comparison with Two-TruckStrings or PlatoonsThe recent NACFE confidence report on two-truck platooning[18] summarized fuel-economy test results of predominantlytwo-truck platoons. The variability in vehicle configurationsand test conditions across the various test campaigns thatthey compared demonstrates significant uncertainty in thepotential benefits between a two-truck versus three-truckstring or platoon. To understand these potential differences,and provide a link to these large data sets of two-truck testdata, four separation distances of 6 m, 12 m, 17 m and 58 mwere tested with only two trucks in the CACC string, corresponding to time gaps at 105 km/h of 0.21 s, 0.41 s, 0.6 s, and2.0 s, respectively.Contrast Platooning to LongCombination VehiclesAn important goal of platooning is to improve the efficiencyand cost of long-haul freight delivery, not just to improve fuelefficiency. For a given payload, the net fuel efficiency of aplatoon is improved compared to multiple vehicles driving inisolation. Another option to improve fuel and freight efficiencyis to use long combination vehicles (LCV) whereby one tractorpulls multiple trailers, which has been described as havinggreater benefits in regards to freight efficiency [25, 31]. Fuel-economy tests of an LCV consisting of two 53-ft dry-vantrailers, each with the same cargo weight as in each of theplatoon trailers, were conducted to contrast the fuel savingsof the two methods against two isolated single vehicles.Mismatched TrailersThe previous test program of the three-truck CACC systemdocumented an improvement in the fuel-savings benefits upto 2% for trucks with aerodynamic trailer devices (trailerside-skirts and boat-tails) as compared to the CACC fuelsavings when using the standard trailer [5]. Those previoustests were conducted with all three vehicles configured identically. On-road string or platooning scenarios will likely consistof combinations of differently-configured vehicles. To evaluatesome of the potential variability in fuel savings due to stringsor platoons of differently-configured vehicles, tests wereconducted with the side-skirts and boat-tail removed from asingle vehicle in the platoon. 2018 SAE International; National Renewable Energy Laboratory; National Research Council Canada.
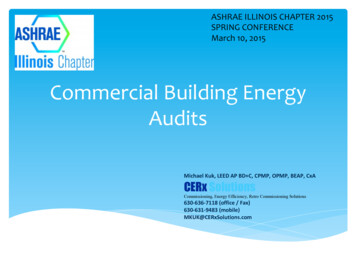
Downloaded from SAE International by Michael Lammert, Tuesday, April 24, 2018Influences on Energy Savings of Heavy Trucks Using Cooperative Adaptive Cruise ControlSpeed VariationsPrevious test programs have evaluated the influence of vehiclespeed on string/platoon fuel savings, with differing results.The study of Bonnet and Fritz [11] using straight trucksdemonstrated up to 5% difference in fuel savings betweenspeeds of 60 and 80 km/h whereas more recent studies ofclass 8 tractor-trailer combinations [15, 5], which include theprevious three-truck CACC test, have identified small differences in % fuel savings between speeds of 89 km/h and105 km/h (55 and 65 mph) that are generally within the experimental uncertainty. Changes in speed will likely be encountered in real traffic scenarios that may lead to energy losses inthe system due to frequent reaccelerations to the higher speed.Data are presented for speed variations between 89 km/hand 105 km/h (55 and 65 mph) for the three-truck CACCsystem at a time gap of 1.2 s, representing a separation distanceof 34.9 m at 105 km/h and of 29.5 m at 89 km/h. The changein separation distance with speed is due to the time-gapcontrol nature of the CACC. The speed was changed every100 seconds, with 30 to 40 seconds of constant speed travelbefore commencing an acceleration or deceleration phase.A set of reference runs were also performed whereby thevehicles performed the same periodic speed profile with thetrucks spaced sufficiently far from each other (quarter tracklength) to consider them isolated.Travelling with Other TrafficTo put into context the fuel savings benefits of truck platooning,it is important to understand the fuel use of these vehicles onthe road. With previous platooning test results identifying aerodynamic benefits and potential fuel savings for trailing vehiclesat separation distances of multiple vehicle lengths (in excess of50 m), the question arises as to whether trucks are already experiencing fuel savings from following other traffic. The work ofSmith et al. [23] performed measurements indicating that inexcess of 50% of the distance driven by long haul operationsmay operate in wake effects from other vehicles, whereas as thestudy by NREL [32] estimates 2% of travel distance of onetypical fleet operation may benefit from “platooning” with othertraffic based on encounters with a target vehicle within 300 ftwhile traveling at speeds over 60 mph.To investigate the potential fuel-savings experienced fromoperating in the wake of other traffic, tests were conductedwith combinations of a either a single truck, a two-truckstring, or a three-truck string following an SUV.It was also desired to understand how much of a penaltyon fuel consumption is associated with vehicle cut-ins. Foursets of test runs were performed using a large SUV to performperiodic cut-ins between the trucks. All cut-in tests wereperformed using a baseline CACC configuration with atime-gap of 1.2 s (35 m separation distance at 105 km/h).For each one-hour run, 30 cut-ins were performed at oneof the CACC gaps (between lead and middle vehicle orbetween the middle and trailing vehicle). The cut-in vehicleremained in place between the trucks for about 25 to 28 s,during which time the truck following the cut-in vehicleadjusted its position to follow the SUV with a 1.2 s time gap.When the SUV exited the string, the CACC re-established its1.2 s time gap between trucks. For each of the two cut-in locations, the same controller was used, which would automatically respond to different cut-in locations for representinggentle and aggressive control strategies. In general, shortercut-in distance (more aggressive) with respect to the subjectvehicle would lead to faster response.Test Setup and ProceduresTest VehiclesFour tractor-trailer combinations were used as part of thefueleconomy tests. Figure 4 shows the test trucks.The control tractor differed from the test tractors, butused the same trailer specification. The use of different tractormodels for the test and control vehicles does not strictlyconform to the SAE J1321 requirements [28] which specifiesidentical vehicles are to be used, although both are aerodynamically-treated tractors with similar engine specificationsthat were expected to behave similarly in the controlledconditions of the tests. During testing, the test vehicles usedabout 2% more fuel than the control ve
heavy-duty vehicles, forming the basis for the current work. Results from a separate closed-track fuel-economy test of this three-truck CACC system have been previously reported [5]. In that work, the minimum separation time tested was 0.6 s that corresponds to a separat