Transcription
Service Oriented Architecture:Design and Implementation UsingAutomotive Linux BSPMarius RotaruSoftware Architect & Technical DirectorCatalin UdmaLinux Software ArchitectJune 2019 Session #AMF-AUT-T3657Company Public – NXP, the NXP logo, and NXP secure connections for a smarter world are trademarks of NXPB.V. All other product or service names are the property of their respective owners. 2019 NXP B.V.
Agenda Introduction to Service OrientedArchitecture Frameworks NXP’s infrastructure for SoA Applications & Use CasesCOMPANY PUBLIC1
Introduction to Service OrientedArchitecture FrameworksCOMPANY PUBLIC2
Vehicle ArchitecturesMega Trends: Safe and Secure Mobility the semi value per car – today’s standardcar at 380AutonomyElectrificationConnectivity Different sensor types Data fusion:Safe Processing withIntegrated AI capabilities Power Efficiency Battery Management Electrification LevelsHybrid, full electric V2X, 5G, Digital Radio Diagnostics / Prognostic HealthManagement OTA Update Management Analytics (edge to cloud) Fail operation Big Data Broad range of solution Need for standardization Software-centric solutions System securityMajor Changes in Network Topology and E2E ArchitecturesCOMPANY PUBLIC3
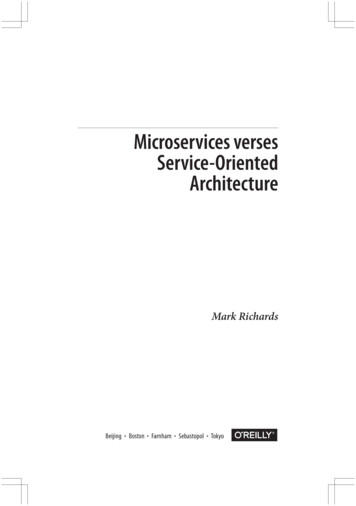
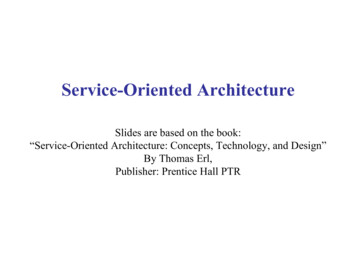
Vehicle ArchitecturesDifferent networking models across the 4 optionsCentral GatewayDomain Ethernet BackboneEthernetNetworkServicesCentral Gateway ECUCAN /FlexRayEthernetDCCAN /EthernetNADBody & ComfortChassis & SafetyNetworkControl. ServicesVehicle dynamicsZonal ArchitectureDCADASBrainOBDCAN,EthernetCAN / LINDCDCCAN,EthernetCAN,EthernetVehicleDynamics& SafetyInfotainmentCAN, EthernetADASCentral Compute - StarCamerase.g. CAN,EthernetZonalIO ControlZonalIO Controle.g. CAN,Ethernete.g. CAN,EthernetCentralComputee.g. CAN,EthernetZonalIO ControlEthernet Meshe.g. CAN,EthernetCentralComputeZonalIO Controle.g. CAN,Ethernete.g. CAN,Ethernete.g. CAN,Ethernete.g. CAN,EthernetCOMPANY PUBLIC4
Vehicle ArchitecturesMega Trends: Embedded Software become Softwarethe semi value per car – today’sstandard car at 380Technology TrendsAUTONOMYELECTRIFICATIONCONNECTIVITYE/E Implication ECU Platform Topology Communication OSEK/VDX Signal Comm Static configuration Rich Operating Systems (e.g. Linux) Service Oriented Architecture Dynamic configurationCOMPANY PUBLIC5
Signal vs Service Oriented Communication ParadigmsBackgroundWith signal-oriented data transmission information is sentwhen the sender sees a need, such as when values areupdated or changed, independent of whether these dataare currently needed by a receiver in the networkSignal-oriented data transmission is used on classic bussystems (CAN, LIN, FlexRay)Service-oriented data transmission, a sender only sendsdata when at least one receiver in the network needs thisdata. The advantage of this procedure is that the networkand all connected nodes are not loaded by unnecessarydata.Service-oriented data transmission is mainly using EthernetbusCOMPANY PUBLIC6
Service-oriented Architecture – SoAAll about MiddlewareSource: ISITA World Summit 2015 FUERST Simon for web .pdfSource: AUTOSAR GuidedTour.pptSource: AUTOSAR AdaptivePlatformFor EXP TechnicalOverview.pptxCOMPANY PUBLIC7
Service-oriented Architecture (SoA)Service-orientated Architecture (SoA) is a way of designing software where the participatingcomponents provide and consume services over a predefined protocol over a onA service is a discrete unit of functionality which can be remotely accessed and ANY PUBLIC8
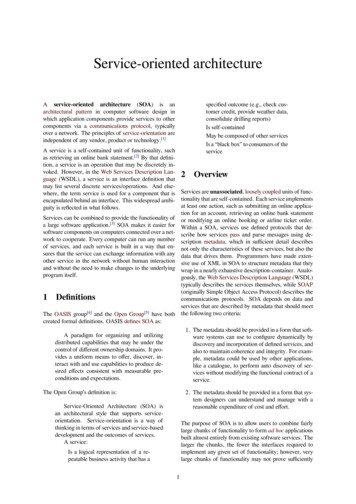
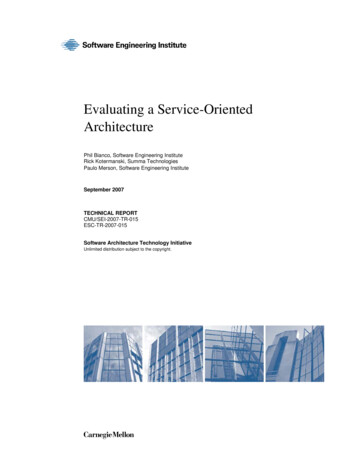
Service-oriented Architecture (SoA)Asynchronous Remote Procedure CallsServer MachineClient teReturnCallCallClient stubReturnServer C RuntimeRPC RuntimeReceiveReceiveSendSendCall PacketResult PacketImplementation of RPC for SoAAsynchronous Remote Procedure CallsCOMPANY PUBLIC9Server
Service Oriented Middleware – SOME/IPSOME/IP Scalable service-Oriented MiddlewarE over IP SOME/IP provides service oriented communicationover a network SOME/IP supports a wide range of middlewarefeatures: Serialization Remote Procedure Call (RPC) Service Discovery (SD) Publish/Subscribe (Pub/Sub) Segmentation of UDP messages SOME/IP can be implemented on different operatingsystems SOME/IP is used for inter-ECU Client/ServerSerialization SOME/IP allows applications to communicate.Source: SOME-IPIntro.pdfCOMPANY PUBLIC10
Service Oriented Middleware – SOME/IPServices Request/Response – a method call with Request and Responsemessages Fire&Forget – a method invocation with just a Request message(does not support answers and errors) Event – a Fire&Forget callback, that is sent out by the Server(e.g. cyclically or on change)– Sent from Server to Client (Similar to regular CAN messages) Field – represents a remote accessible property that includesGetter/Setter and/or Notification (similar to a property on MOST)COMPANY PUBLIC11
Service Oriented Middleware – SOME/IPService Discovery - SDSOME/IP-SD is used to: Locate service instances. Detect if service instances are running. Implement the Publish/Subscribe handlingImage /COMPANY PUBLIC12
Service Oriented Middleware – SOME/IPPros and Cons[1]Main Advantages:Possible Issues: Coexistence with existing system Computational Overhead due to No functional Losscomplex architectures High Data Rate and Unicast Increase Storage Requirements Increase data transfer amount Single Point of Failure (e.g. Switch Low Transportation OverheadMalfunction) Dynamic IP Addressing Gain in maintainability and flexibilityRecommended usage: Suitable for driver assistance and Infotainment systems Still to complex for Hard Real-time system (e.g motor control)Several Open Source implementations (e.g. GENIVI vsomeip)[1] eoriented-middleware-over-ipCOMPANY PUBLIC13
Service Oriented Middleware – DDSDDS Data Distribution SoftwareStandard-based Integration Infrastructure for Critical ApplicationsFamily of specificationsImages a-gateway-specificationCOMPANY PUBLIC14
Service Oriented Middleware – DDSDDS Standard DDS is the Proven Data ConnectivityStandard for the IoT OMG: world’s largest systems softwarestandards org– UML, DDS, Industrial InternetConsortium DDS: open and cross-vendor– Open Standard and Open Source– 12 implementationsImages MG: Object Management GroupRTPS: Real-Time Publish/SubscribeDDS Wire Protocol (RTPS) Peer to peer Transport-independent QoS-aware and ReliableCommunication– Including multicast, for 1-many reliable communication Any data size over any transport. Automatic Discovery and Presence Plug and Play Decoupled– Start applications in any order Support for Redundancy– Multiple data sources– Multiple network paths High performance native “wire” speedsCOMPANY PUBLIC15
Service Oriented Middleware – DDSCommunication pattern based on Data-centric Publish/SubscribeProvides a “Global Data Space” that is accessible to allinterested applications.- Data objects addressed by Domain, Topic and Key- Subscriptions are decoupled from Publications- Contracts established by means of QoS- Automatic discovery and configurationImages source: NY PUBLIC16
Service Oriented MiddlewareDDS as Core Connectivity FrameworkImages source: NY PUBLIC17
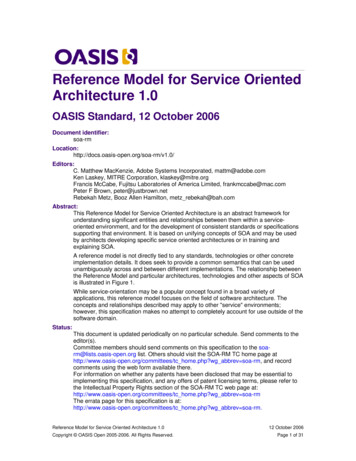
Adaptive AUTOSARas Service Oriented Communication Framework Was initially built around SOME/IP andfollows most of its principles Based on a proxy/skeleton SOAarchitecture Especially tailored for Modern C (C 11 in External APIs, C 14 inInternal eApplicationASW::XYZASW::ABCNon-PF ServiceNon-PF ServiceUser Applicationsara::restara::tsyncara::sm serviceara::diag serviceRESTfulTime SynchronizationStateManagementDiagnosticsara::s2s serviceara::nm serviceSignal to ationMgnt.IPC(local) Aims to be communication frameworkindependentAdaptiveApplicationSOME/IP ara::com is the CommunicationManagement API for the AUTOSARAdaptive Platform.ara::perara::phmPersistencyPlatform Health Mgnt.ara::coreara::execara::iamara::logCore TypesExecution Mgnt.Identity Access Mgnt.Logging & TracingPOSIX PSE51 / C STLara::cryptoara::ucm serviceOperating SystemCryptographyUpdate and Configuration ManagementAUTOSAR Runtime for Adaptive Applications (ARA)(Virtual) Machine / Container / HardwareLegendSERVICENon-PF ServiceSERVICEPlatfrom ServiceFCsAUTOSAR Runtime for Adaptive Applications Σ of all Functional Cluster APIs /ServicesAPI or Service Interface of a Functional Cluster.APIPlatformFoundation FCsSource: AUTOSAR AdaptivePlatformFor EXP TechnicalOverviewCOMPANY PUBLIC18
Service Oriented Middleware – Adaptive AUTOSARARA::COM - Service-oriented Communication – Proxy/Skeleton ParadigmTwo code artifacts are generated fromAUTOSAR ARXML service description. Service Proxy: facade: an instance of agenerated class, which provides methods forall functionalities the service provides. Service Skeleton: instance of a generatedclass which allows to connect the serviceimplementation to the CommunicationManagement transport layer Bindings can be implemented for REST, DDS or other Middleware Transport Layers that supportpublish / subscribe / event patterns SOMEIP is the default transport layer available on the shelf for ARA::COM Transport Layer is not necessary network, it can be shared memory or direct function calls if client andservice are running the same ECU / address spaceSource:AUTOSAR AdaptivePlatformFor EXP TechnicalOverviewCOMPANY PUBLIC19
AUTOSAR Adaptive – Architectural OverviewARA::COM – Language and Network BindingExecutable An Adaptive Applicationmay use differentcommunication bindingsunderneath the ara::comcommon API. DDS is placed parallel toother network bindingssuch as SOME/IP.Application layerAPIARA::COM APIAPILanguage BindingOperatingsystemExecutionManagementSOME/IP Communication BindingIPCBindingDDS Communication DDSCommunicationMiddlewareAdaptive AUTOSAR FoundationNot standardized- analog toCom SendSignal()Source:AUTOSAR AdaptivePlatformFor EXP TechnicalOverviewCOMPANY PUBLIC20
Service Oriented Middleware – ROS(A) ROS Community: ROS Distributions, RepositoriesCarnegie MellonNode5Node4Node 1Laser Scanning(B) Computation Graph: Peer-to-Peer Network ofROS nodes(processes).Node 2:Map BuildingNode 3:PlanningNode6Node7(C) File-system level: ROS Tools for managing source code, buildinstructions, and message definitions.COMPANY PUBLIC21
SW Environment: SoASoAAppSoAAppService Oriented ArchMiddlewareHLOSHypervisors(Containers)CPU(e.g. Cortex-A)DefinitionWhy e.g. AdaptiveASAR, ROS,MQTT?e.g. Linux,QNXSoA: Service Oriented Architecture Applications built with ‘service’ layer ofabstraction SoA App is not bound to specific OS,SOC, or even ECU e.g. XEN(LXC) Motivation Ease of development, deployment& integration OEMs move away from deployfeatures by ECU, to features bySoA Apps.SoA Apps also referred to as‘Services’ Tier1 moves to deliver SoA Appsto OEMs, rather than ECUs.Framework that will transform howvehicle features are built and deployed– portability at forefront (static ordynamic) Simplifies the OTA deploymentSoA Framework examples: Adaptive AUTOSAR MQTT ROS Challenges for SOC Arch Difficult to HW enforce isolation ofSoA Apps for security / safety SoA Framework dictatesperformance, security & safety.Framework provider & SOCprovider need to work closely tomake use of hardware features.COMPANY PUBLIC22
NXP’s Infrastructure for SoAAutomotive Linux BSPCOMPANY PUBLIC23
Overview of Automotive Linux BSP A Linux BSP for all NXP AutomotivePlatformsOpenSource Targeting ADAS, C&S and Disty MarketIntegrated with SDKs (Vision, tforms& BoardsAutomotiveLinux BSPUbuntuBenchmarks Quarterly Releases A single package for multiple SOCsSecurityMulticoreCOMPANY PUBLIC24
Automotive Linux BSP – Ready for SOA PrototypingActuatorsSafetyCriticalSafe APDLinux EcosystemIPCFSafe HypervisorNXP NG HWCommunicationCores (R, M)Computational Cores (A)We are building an Infrastructure leveraging huge open source ecosystem and various communities targetedautomotive softwareCOMPANY PUBLIC25
Automotive Linux BSP - Product IDDLEWAREProvidedby SDKsNXP URITYCRYPTOSECUREBOOTYOCTOIPCFSERVICESHypervisor (XEN)SOCSoC1SoC2SoC3SoC4BlueBoxCOMPANY PUBLICS32X 26
Adaptive AUTOSAR – Reference ImplementationAdaptive AUTOSAR ready to use/build ecosystemAdaptive PlatformDemonstratorAdaptive ApplicationAdaptive AUTOSAR Foundationara::tsyncara::sm serviceara::diag serviceTime SynchronizationStateManagementDiagnosticsara::s2s serviceara::nm serviceSignal to estRESTfulSOME/IPara::comCommunication Mgnt.ara::perara::phmPersistencyPlatform Health Mgnt.ara::coreara::execara::iamara::logCore TypesExecution Mgnt.Identity Access Mgnt.Logging & TracingPOSIX PSE51 / C STLara::cryptoara::ucm serviceOperating SystemCryptographyUpdate and Configuration ManagementOS Abstraction Layer (OSAL)QNXLinuxIntegrityOS ( BSP)Linux BSPQNX BSPNXP DevelopNXP and/or 3rd party3rd partyCOMPANY PUBLIC27
Inter-Platform Communication Framework (IPCF) Multiple homogeneous orheterogeneous processing coresLocated on a single chip or onmultiple chips in a circuit boardRunning multiple OSesCommunicating over variousinterfaces:Processor 1Processor QNXPCIeShared MemoryProcessor 3 Ethernet PCIeEthernet2xCortex-R5 USB UART,SPI Shared memoryOther OSCOMPANY PUBLIC28
IPCFAPIMCAPIFIFOFIFOFIFOCORE IPCFNodesEndpointsISO26262IPCF libOS Abstraction LayerSoC Abstraction LayerTransport Abstraction LayerVETH / VTTYDriversUARTUSBSharedmemPCIeETHCOMPANY PUBLIC29
IPCF – Linux2AUTOSAR over Shared MemoryCustomer AppsLinuxuserspacevSomeIP,OpenSSL,IPsecCustomer Apps (SW-C)MCAPIMCAPIIPCF libIPCF CDDPOSIX socket APICom Stack AUTOSAR[PduR/TcpIp]TCP/IP stackVirtual ecOCVirtual ETHCDDZero-copy APIZero-copy APISHM driverSHM CDDCustomerCDDMEMORYCOMPANY PUBLIC30
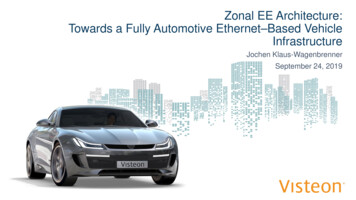
Virtual Ethernet ifconfig pcie0 192.168.1.1 ifconfig pcie0 192.168.1.2 ping 192.168.1.2PING 192.168.1.2 56(84) bytes of data.64 bytes from 192.168.1.2: time 0.34 ms64 bytes from 192.168.1.2: time 0.35 msStandard Ethernet Linux interfaceInterfaces in LS LinuxInterfaces in S32V Linuxpcie0Virtual Eth InstancesImplementation:- Virtual Ethernet Network Device- PCIe driverpcie0Virtual Eth InstancesvethvethPCIe Driver (RC)PCIe Driver MPANY PUBLIC31
Linux BSP Delivery: Easy of Use Using YoctoYocto Upstream-NXP sourcecode-Linux KernelU-bootKernel modules(eth, PCIe)Linux UserspaceNXP YoctoBSPYocto UpstreamLayersYocto BSPNXP SpecificlayersPokyOpen embeddedVirtualizationDepends onYocto UpstreamYocto Project: An open source collaborationproject that provides templates, tools andmethods to help you create custom Linuxbased systems for embedded productsTesting andValidationYoctotestingNXP Delivery:Flexera & CAFFlexera:- Documentation- Yocto Binaries- Quality packageCAF:Open-Source CodeDepends on NXPsource codeCOMPANY PUBLIC32
Ubuntu DeliveryYocto Upstream-PokyOpenembeddedVirtualizationDepends onYocto UpstreamNXP source code-Linux KernelU-bootKernel modules(eth, PCIe)Linux UserspaceYocto UpstreamLayersYocto BSPNXP SpecificlayersDepends on NXPsource code-UbuntuUbuntupackagerepositoryUbuntu scriptsUbuntutoolchainTesting andValidationNXP Yocto BSP--YoctotestingDepends on YoctoNXP specific layersthat further depend onNXP source codeNXP Delivery:FlexeraUbuntu:Flexera:- Documentation- Yocto Binaries- QualitypackageCAF:Open-Source Code-UbuntuTestingUbuntu specificlayerDepends on publicUbuntu resourcesUbuntu Delivery – The same delivery mechanism as for Yocto The Ubuntu is generated from Yocto build, with Yocto/bitbake commands. This includes- Getting the Ubuntu packages- Building the NXP specific source codeCOMPANY PUBLIC33DocumentationNo Ubuntu BinariesQuality PackageCAF: Open-source
Customer FlowStart Here:nxp.com- FlexeraFlexera:- Documentation- Yocto Binaries- Quality packageSeparate locations for Open Source code(CAF) and proprietary (Flexera)Install Open SourceLinux BSP using repocommandsOpen Source componentsautomatically downloadedfrom CAF- No Open SourceArchiveGIT repository forOpen Sourcecomponents- Linux- U-boot- Yocto- Drivers & AppsGPU User-spaceLibraries repo init -u auto yocto bsp repo syncNon-Open Source support:Manually Download from FlexeraExample: GPU (Vivante) # Download and enable GPU support in Yocto bitbake gpuCOMPANY PUBLIC34
Service Oriented Architectures enabledby NXP’s Automotive Linux BSPCOMPANY PUBLIC35
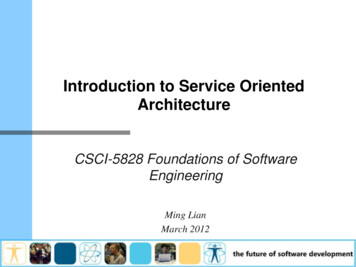
NXP Bluebox: Central Processing Unit For Autonomous DrivingHighly Optimized Sensor FusionHigh Performance per Power Various sensor data streams: Radar, Vision, LiDAR, V2XS32V234 automotive vision and sensor fusion processorLS2084A embedded compute processorS32R27 radar microcontrollerDecision MakingEase of Development ROS SpaceOpen ROS Space Linux -basedsystemProgrammable in linear CEasily customizableDevelopment environment formainstream vehiclesSecurity CSE andARM TrustZone technologyUp to 90,000 DMIPS at 40 WComplete situational assessmentSupporting classificationObject detection and localizationMappingGlobal Path PlanningBehavior PlanningMotion PlanningNXP Automated Drive Kit Computing: NXP BlueBox 2.0Vision: Front Camera Software with MIPI CSI2CameraLiDAR: Selection of Lidars supportedRADARInertial Measurement Unit & Integrated GPSOperating SystemMiddleware: ROS (Robot Operating System)Adaptive AUTOSARCOMPANY PUBLIC36
Virtual Ethernet ifconfig pcie0 192.168.1.1 ifconfig pcie0 192.168.1.2 ping 192.168.1.2PING 192.168.1.2 56(84) bytes of data.64 bytes from 192.168.1.2: time 0.34 ms64 bytes from 192.168.1.2: time 0.35 msStandard Ethernet Linux interfaceInterfaces in LS LinuxInterfaces in S32V Linuxpcie0Virtual Eth InstancesImplementation:- Virtual Ethernet Network Device- PCIe driverpcie0Virtual Eth InstancesvethvethPCIe Driver (RC)PCIe Driver MPANY PUBLIC37
MPC-LS Vehicle Network ProcessingChipset for Service-oriented GatewaysMPC-LSChipsetHeterogenous multi-core processing Real-time high-performance applicationsMPC5748GAutomotive meets enterprise networking CAN FD, LIN, FlexRay interfaces Up to 10 Gigabit Ethernet with packet accelerationEnd-to-end security from vehicle to cloud Embedded Hardware Security Module for cryptography andsecure key managementCOMPANY PUBLIC38LS1043A
Vehicle Service-oriented Gateway Enables OpportunitiesThe NXP MPC-LS chipset enables service-oriented gatewaysCOMPANY PUBLIC39
SW Environment: ‘Potential’ Use CaseProvides each SoA App withnetwork abstraction usingSOME/IP (service IDs)Provides each container withown network stack (i.e. IP Addr)HLOS UserSpace AppBare-metal AppHigh BW PCIE(w/ lightweightOS)CPU(e.g. Cortex-A)Linux OSHigh BW Ethe.g. Fixedfunction (e.g.PCIE Manager)LXCFrameworkLinux OSAdaptiveAUTOSARFramworkQNX OSSecureAppe.g. OTAManagerSecureAppSoA Appe.g. SafetyservicesSoA AppContainerAppe.g. NetcomContainerAppe.g. ConnectedservicesProvenCoreOSARMTrusted f/we.g. XEN Hypervisor(Type 1)XEN Hypervisor(Type 1)ClassicAUTOSAR OSCPU(e.g. Cortex-A)CPU(e.g. Cortex-A)CPU(e.g. Cortex-M/R)Prevent hypervisor bottlenecks.HW support for Hypervisor,IOMMU, Virtual IRQs.Careful assignment of I/O toGuests.COMPANY PUBLIC40
Automotive Linux BSP – Ready Solution for SOA PrototypingService-orientated Architecture (SoA) is driving change in SW architecture across the vehicleMoving to scalable, abstracted platformsOptimized BSP items and thecommunication path to better leverageNXP’s HW resources(e.g. DDS Security offload using theSecurity and Ethernet)Productize strategic SW itemsStrategic partnership for Production readysolutionCOMPANY PUBLIC41
NXP and the NXP logo are trademarks of NXP B.V. All other product or service names are the property of their respective owners. 2019 NXP B.V.
Service-oriented Architecture (SoA) Service-orientated Architecture (SoA) is a way of designing software where the participating components provide and consume services over a predefined protocol over a network Functionality Separation Units Services Distribution Ownership domains Interope