Transcription
OPTIMAL FLIGHT TRAJECTORY GENERATIONALGORITHMS FOR URBAN AIR MOBILITYWeihong YuanA thesisinThe DepartmentofElectrical and Computer EngineeringPresented in Partial Fulfillment of the RequirementsFor the Degree of Master of Applied Science in Electrical and ComputerEngineeringConcordia UniversityMontréal, Québec, CanadaJuly 2020c Weihong Yuan, 2020
CONCORDIA UNIVERSITYSCHOOL OF GRADUATE STUDIESThis is to certify that the thesis preparedBy:Weihong YuanEntitled:Optimal Flight Trajectory Generation Algorithms for Urban Air Mobilityand submitted in partial fulfillment of the requirements for the degree ofMaster of Applied Science (Electrical and Computer Engineering)complies with the regulations of this University and meets the accepted standards withrespect to originality and quality.Signed by the final examining committee:ChairDr. W. Lucia (CIISE)External ExaminerDr. W. Lucia (CIISE)Internal ExaminerDr. K. SkoniecznySupervisorDr. L. RodriguesApproved by:Dr. Y.R. Shayan, ChairDepartment of Electrical and Computer Engineering20Dr. Mourad Debbabi, Interim Dean,Faculty of Engineering and ComputerScience
AbstractOptimal flight trajectory generation algorithms for urban air mobilityWeihong YuanThe concept of Urban Air Mobility (UAM) has gained significant attention recently. Inthis vibrant domain, the capability of generating an optimal flight trajectory is of essentialimportance. This study aims to provide analytical solutions to generate the optimal trajectory in the three most common UAM scenarios. The first case is the comfort-optimaltrajectory for drone package delivery and air taxis carrying passengers. The cost is evaluated as a linear combination of acceleration (or specific support force) and flight time.The second case is the control-effort-optimal trajectory for hovering vehicles. Hovering vehicles are expected to be the dominant model of air taxi. The objective function is a linearcombination of thrust and flight time. The third case is the Direct-Operating-Cost (DOC)optimal trajectory for electric fixed-wing aircraft, on which all major aerospace companiesare working. DOC is a linear combination of energy consumption and flight time.The trajectory optimization problems are formulated as optimal control problems andthe Pontryagen’s Minimum Principle is applied to solve them. The solution is the referenceposition as a function of time, which is a guidance law and is fed to the downstream flightcontroller. The biggest advantage of an analytical solution is to reduce the computationaltime. It can also be integrated with other flight path planning methods. Several simulationexamples will be presented to show the effectiveness of the proposed method.iii
AcknowledgmentsI wish to express my deepest gratitude to my supervisor, Professor Luis Rodrigues,who recognized my problem-solving abilities, convincingly guided and encouraged me to beprofessional and do the right things even when the road got tough. Without his persistenthelp, the goal of this project would not have been realized.I wish to show my gratitude to my colleagues, Bruno Carvalho, Mitchell Lichocki, StevenLi, Mailis Rodrigues, Júlia Zamboni, Maryam Bagherzade. It is whole-heartedly appreciatedthat your great advice for my study proved monumental towards the success of this study.I am indebted to MITACS, Marinvent and Concordia University. Without their supportand funding, this study could not have been completed.I would like to pay my special regards to my family. They kept me going on and thiswork would not have been possible without their input.I wish to thank all the people whose help was a milestone in the completion of thisproject.Last but not least, I would like to recognize the invaluable assistance from Concordiastaff during my study.iv
ContentsList of FiguresviiList of Tablesviii1 Introduction11.1Literature Survey . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .21.2Contributions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .82 Onboard Generation of Optimal Flight Trajectory for Package Deliveryand Passenger Comfort92.1Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .92.2Optimal Trajectory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .92.2.1Optimal Flight Modes . . . . . . . . . . . . . . . . . . . . . . . . . .92.2.2Optimal Control Problem . . . . . . . . . . . . . . . . . . . . . . . .102.2.3On-board solution for optimal flight time . . . . . . . . . . . . . . .152.2.4Feasible flight time satisfying a peak velocity constraint . . . . . . .17Simulation Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .202.3.1Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .212.3.2Optimal passenger satisfaction trajectory . . . . . . . . . . . . . . .212.3.3Optimal trajectory verifying peak velocity constraint . . . . . . . . .21Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .232.32.43 Optimal Trajectory Trading-off Control Effort and Flight Time for Hovering Vehicles253.1Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .253.2Optimal Trajectory without Wind . . . . . . . . . . . . . . . . . . . . . . .263.2.1Problem Description . . . . . . . . . . . . . . . . . . . . . . . . . . .263.2.2Problem Formulation26. . . . . . . . . . . . . . . . . . . . . . . . . .v
3.2.3Optimal trajectory solution . . . . . . . . . . . . . . . . . . . . . . .27Simulation Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .333.3.1Case 1: Smaller rotorcraft . . . . . . . . . . . . . . . . . . . . . . . .343.3.2Case 2: Larger manned helicopter . . . . . . . . . . . . . . . . . . .35Optimal Trajectory in Constant Wind Shear Field . . . . . . . . . . . . . .363.4.1Problem description . . . . . . . . . . . . . . . . . . . . . . . . . . .363.4.2Problem Formulation. . . . . . . . . . . . . . . . . . . . . . . . . .37Problem Solution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .373.5.1Optimal Trajectory Formula. . . . . . . . . . . . . . . . . . . . . .383.5.2Optimal Flight Time and Peak Thrust Constraint . . . . . . . . . .413.5.3Optimal Trajectory in Time-dependent Wind . . . . . . . . . . . . .423.6Simulation Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .433.7Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .453.33.43.54 DOC-optimal Longitudinal Trajectory for Electric Fixed-wing Aircraft:A Hybrid Optimal Control Approach484.1Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .484.2Problem Formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .494.2.1Problem description . . . . . . . . . . . . . . . . . . . . . . . . . . .494.2.2Assumptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .494.2.3Flight dynamics . . . . . . . . . . . . . . . . . . . . . . . . . . . . .504.2.4System dynamics . . . . . . . . . . . . . . . . . . . . . . . . . . . . .514.2.5Optimal control problem . . . . . . . . . . . . . . . . . . . . . . . . .52Problem Solution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .524.3.1Hybrid optimal control theory. . . . . . . . . . . . . . . . . . . . .524.3.2Optimal trajectory for a given cruising altitude . . . . . . . . . . . .534.3.3Suboptimal Solution Satisfying Speed Constraints . . . . . . . . . .54Simulation Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .554.4.1Effect of cost index CI . . . . . . . . . . . . . . . . . . . . . . . . . .554.4.2Effect of efficiency η . . . . . . . . . . . . . . . . . . . . . . . . . . .564.4.3Effect of mass m . . . . . . . . . . . . . . . . . . . . . . . . . . . . .564.4.4Effect of along-track horizontal wind vw (z) . . . . . . . . . . . . . .57Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .574.34.44.55 Conclusions60Bibliography61vi
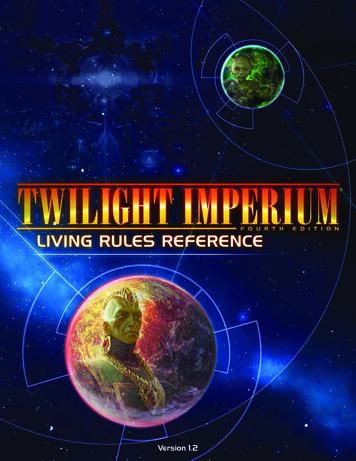
List of Figures1UAM illustration [1] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .12Layered structure of FMS-FCS . . . . . . . . . . . . . . . . . . . . . . . . .23Hovering vehicle, passenger drone [2] . . . . . . . . . . . . . . . . . . . . . .44Airbus E-fan [3] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .65Possible cases for the shape of function R(tf ) . . . . . . . . . . . . . . . . .196Optimal cost for different tf . . . . . . . . . . . . . . . . . . . . . . . . . . .217Optimal trajectories for two tf values. . . . . . . . . . . . . . . . . . . . . .228Effect of CI on total cost. . . . . . . . . . . . . . . . . . . . . . . . . . . . .239Effects of CI on optimal parameters. . . . . . . . . . . . . . . . . . . . . . .2310Optimal passenger satisfaction trajectory, velocity and acceleration for optimal tf . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2411Optimal trajectory, velocity and acceleration satisfying maximal velocity limit. 2412Curves of function R for all cases . . . . . . . . . . . . . . . . . . . . . . . .3313Optimal trajectory for smaller rotorcraft. . . . . . . . . . . . . . . . . . . .3414Pareto trade-off of CI. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3515Optimal trajectory for manned helicopter. . . . . . . . . . . . . . . . . . . .36163D flight trajectory in wind . . . . . . . . . . . . . . . . . . . . . . . . . . .4517Velocity and thrust plots with wind. . . . . . . . . . . . . . . . . . . . . .4618Velocity and thrust plots without wind . . . . . . . . . . . . . . . . . . . . .4619Actual thrust in wind . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4720Pareto tradeoff . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4721Air density interpolation . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5222Effect of CI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5723Optimal trajectory for different values of CI , CI 1 CI 3 105105for the red line,for the blue line . . . . . . . . . . . . . . . . . . . . . . . . . .5824Vertical profile of along-track wind speed . . . . . . . . . . . . . . . . . . .5925Optimal trajectory with and without wind . . . . . . . . . . . . . . . . . . .59vii
List of Tables1Missing points in open literature . . . . . . . . . . . . . . . . . . . . . . . .72Simulation parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .203Simulation parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .344Simulation parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .355Simulation parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .446Total cost . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .457Standard air density [4] . . . . . . . . . . . . . . . . . . . . . . . . . . . . .518Model parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .569Effect of CI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5610Effect of efficiency . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5611Effect of mass . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .57viii
Chapter 1IntroductionRecently, the concept of Urban Air Mobility (UAM) has gained significant attention.UAM enables safe and efficient air traffic operations in a metropolitan area [5] as illustratedin Fig. 1. In such future urban airspace, there are aircraft delivering packages or transportingpassengers. The aircraft are of different types, such as hovering vehicles and fixed-wing.In this vibrant domain, the capability of generating an optimal flight trajectory from theorigin to the destination is of essential importance. From the customer’s point of view,an important question is what is the optimal flight trajectory for passenger comfort andpackage delivery. From the operator’s point of view, an important question is what is theoptimal trajectory minimizing the operating cost.This study aims to provide analytical solutions to generate the optimal trajectory inthree target scenarios. Analytical solutions not only reduce the computational time butprovide physical insight as well. Additionally, they can also be integrated with other flightpath planning methods.Figure 1: UAM illustration [1]1
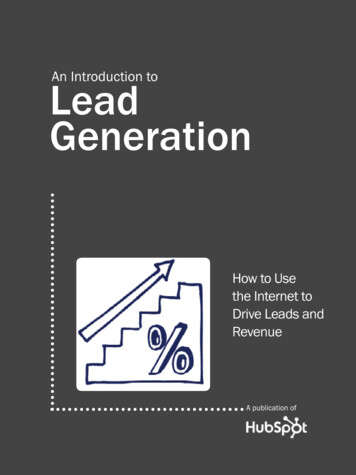
To achieve a certain level of abstraction, so as to provide beneficial robustness in flighttrajectory tracking, it is favorable to have a double layered system (Fig. 2), namely a FlightManagement System (FMS) as the upper level and a Flight Control System (FCS) as thelower level. A FMS generates waypoints or continuous guidance and feeds them into theFCS, whose task is to control the aircraft to track the trajectory [6]. In this research, wework on FMS only. Note that the outputs of the FMS, such as position and attitude as afunction of time, can be treated as reference inputs to the FCS. On the other hand, in mostapplications the dynamics of the FCS, such as speed variation for example, are fast enoughto be neglected by the FMS.Figure 2: Layered structure of FMS-FCS1.1Literature SurveyDrones are more and more capable of a wide range of applications such as remote sensing, the delivery of packages and agricultural spraying [7]. Many companies are conductingresearch and development on delivery using drones because unmanned delivery can savecosts and time since drones are not constrained by traffic jams [8]. Drone organ delivery fortransplants appears naturally as a potential application because the payload is not usuallyvery heavy, it does not take much space to be transported, and its delivery is typically anemergency [9]. Reference [10] addressed the security problem with drones for organ deliverysuch as hacking and privacy issues. Since the organs or any other precious and fragile parcelmay be damaged by contact, friction, or collision due to the motion of the carrier, one needsto find a way to fly the carrier to minimize these damages during flight. This can be doneby minimizing the dynamic force transferred to the package. Another application scenariothat may appear soon in the future for the methodology proposed in this study is urbantransportation and passenger comfort. Europe has adopted the Flight Path 2050 Challenge2
demanding that 90 percent of travelers are able to complete their journey door-to-doorwithin four hours by 2050 [11]. A similar concept took its shape earlier in the USA namedSATS (Small Aircraft Transportation System), aiming at dealing with the saturation ofexisting transportation systems [12]. In this case, travel comfort and satisfaction may become the number one factor, which is strongly related to the body acceleration transferredby the aircraft to the passengers [13]. Therefore, it is essential to be able to generate anoptimal flight trajectory onboard in real-time. Many trajectory generation methods havebeen developed, such as the sampling-based approach [14], artificial heuristic approach [15],geometry-based approach [16], BADA model-based approach [17] and dynamic programming [18], to name a few. Several articles have studied optimal flight trajectories for differentobjectives. References [6, 19] solved the optimal control problem for fixed-wing aircraft bysplitting the flight profiles into three segments (climb, cruise, and descent) and yielding anoptimal speed profile for the given (regulated) flight path. References [20–22] studied theoptimal trajectory for the shortest flight time. Reference [23] provided a numerical solution of the optimal energy-efficient trajectory of a quadrotor UAV assuming that the initialand final angular velocities of each motor are identical. Reference [24] tackled the minimalacceleration trajectory for quadrotors in the 2D vertical plane, while reference [25] studiedthe minimal control effort trajectory in the vertical plane considering first order drag effectsin one direction. In chapter 2, we present the flight trajectories that optimize the passengercomfort and the package delivery performance.After viewing the optimal trajectory from the passenger’s point of view, we continue tolook at the problem from the operator’s point of view in chapters 3 and 4. Since the modelof the aircraft must be considered during the problem formulation, we deal with two mostcommon models: hovering vehicles and fixed-wing aircraft. In chapter 3, we determine theflight trajectory which optimizes the control effort.The research of optimal trajectories from the operator’s point of view starts with fuelpropelled fixed-wing aircraft. The authors in [26] investigated the fuel-optimal trajectoryand summarized existing dynamic models to formulate the problem, which inspired ourproblem formulation. In chapter 3, the model of hovering vehicles will be studied as shownin Fig. 3. The articles [20, 27] studied the time-optimal trajectory for quadrotors. Feasible ranges of the control inputs were studied in [27]. Reference [24] tackled the minimalacceleration trajectory for quadrotors in a 2D vertical plane. The work presented in [28]was on snap-optimal trajectory. The research published in [29] studied the minimal controleffort trajectory in the vertical plane with 1D drag. The study was performed only for zeroboundary conditions taking the pitch angle and thrust as control inputs. It was claimedin the paper that a completely analytical solution was not possible. The authors in [30]3
Figure 3: Hovering vehicle, passenger drone [2]investigated a similar problem even though it was interpreted as the energy-optimal trajectory. A second order drag model was considered and some constraints on states and controlinputs were incorporated. However, the problem was solved in 1D. Unfortunately, the 3Dtrajectory would not simply be the combination of the three decoupled 1D trajectories.Similar to [29], only the optimal control law was obtained instead of an explicit solutionof the optimal trajectory. Reference [23] solved numerically the optimal trajectory for aquadrotor UAV with 16 states.By contrast with the previous literature, the objective of chapter 3 is to analyticallysolve the optimal trajectory by trading-off control effort and flight time. The benefits of theresult are threefold, 1) it implies a potential longer lifetime of the actuators and less maintenance cost, 2) it implies less energy consumption since control effort is directly related toenergy consumption, 3) it might require less space and weight for the aircraft at an earlydesign stage. Most published studies on trajectory generation in wind were conducted forfixed-wing aircraft. Article [31] analyzed wind effects (specifically head and tail wind) onDirect Operating Cost (DOC) optimal cruise-descent trajectories. Reference [32] extendedNeighboring Optimal Control (NOC) to study the minimum-time problem for a horizontalflight in a variable wind. The work in [33] determined the fuel-optimal cruise altitude considering a zero gradient of fuel consumption rate and then the time-optimal horizontal routewas computed with Dynamic Programming (DP). Candidate optimal control actions werefound in [34] to minimize energy consumption for an airship straight flight in a constant4
wind field. Reference [35] used network flow methods and Dijkstra’s algorithm to find theshortest path while assuming a fixed airspeed and flight level. The authors in [36] applieda genetic algorithm to study flight track optimization for North Atlantic Airspace (NAT).Reference [37] represented lateral routes as a graph and calculated wind-optimal trajectories by a shortest-path search. Article [38] studied time-optimal path planning in a uniformhorizontal wind for stationary flights. Another way to calculate the vertical flight cost withperformance database was proposed in [39] and verified with FlightSIM and FMS benchmarks. Reference [40] used a genetic algorithm to select the optimal speeds, a
The concept of Urban Air Mobility (UAM) has gained signi cant attention recently. In this vibrant domain, the capability of generating an optimal . capability of generating an optimal ight trajectory is of essential importance. This study aims to provide analytical solutions to generate the opti